基于Matlab/Signal Constraint工具箱的电动振动台的研究
2015-09-09孙庆克顾伟褚建新孙林
孙庆克+顾伟+褚建新+孙林

摘要:针对电动振动台系统在科学研究和其在仪器可靠性试验中的应用,设计了一种性能良好的电动振动台控制系统。本文首先介绍了电动振动台工作原理,并在此基础上确定了电动振动台的简化模型,然后采用PID算法调整控制器参数,使用Matlab/Signal Constraint工具箱对PID控制器进行优化设计。仿真实验结果表明,设计的电动振动台系统具有良好的动态性能并且具有较小的超调量,满足性能要求,能够较好的模拟所给定的信号。
关键词:电动振动台;Signal Constraint工具箱;PID控制器;优化
中图分类号:TP275 文献标识码:A
Reaserch on electric vibration table based on Matlab/ Signal Constraint toolbox
Sun Qing-ke,Gu Wei,Sun Lin
(Key Laboratory of Marine Technology and Control Engineering Ministry of Communications, Shanghai Maritime University, Shanghai, 201306, China)
Abstract: Aiming at the application of electric vibration table system in scientific research and instruments in reliability test,electric vibration table servo control system with high performance was designed.Firstly,control system of electric vibration table based on working principle was modeled.Secondly, the conventional PID algorithm was adopted to design the controller .And then a method of using Matlab/Signal toolbox was presented to optimize the controller. The simulation test results indicate that the designed system can meet the requirements with fine dynamic performance and small overshoot and can simulate the signal we have given primely.
Keywords: electric vibration table; Signal Constraint toolbox;PID controller;optimize
- 引言
振动试验的目的是在实验室条件下对产品、设备、工程等在运输、使用等环境中所受的振动环境进行模拟,以检验其可靠性以及稳定性[1]。国外专业化研制振动试验系统的主要有美国DP公司、LDS公司、日本的IMV等公司,其研制生产的各类试验设备包括了从单自由度到多自由度、从电动到电液各种类型产品领域,代表着世界最高水平。国内研究振动试验系统起步较晚,浙江大学与杭州亿恒科技有限公司合作研究, 研制的基于多DSP的实时振动试验系统可完成机、正弦、冲击等振动试验。东菱公司研制了世界最大推力的35吨超大型电动振动台[2]。电动振动台因其频率范围宽、波形良好的特点而被广泛应用在振动试验中,然而其也存在价格较高、体积庞大等缺点。因此,研究与开发一种价格便宜、结构简单、所需功能容易实现的电动振动台,具有重要的实际意义。
PID 控制器广泛应用于工业控制系统中, 传统的PID 调节方法过于复杂, 且很难达到期望的动态响应。针对以上问题本文使用了一种新的PID 参数整定方法, 即利用MATLAB的Signal Constraint工具箱对PID控制器进行优化设计。本文首先建立了电动振动台模型,并采用提出的PID参数调整方法建立了闭环控制下的电动振动台控制系统。
1 电动振动台原理
电动振动台以电磁感应基本原理为基础,应用电磁感应的方法使振动台面发生往复运动。当磁场中的导线有电流流过时,会产生使导线运动的力,力的方向根据导线中电流的方向而变化,导线产生往复运动。所以,振动台的振动力是把通有适当电流的驱动线圈放置在高磁通密度的气隙里产生的。
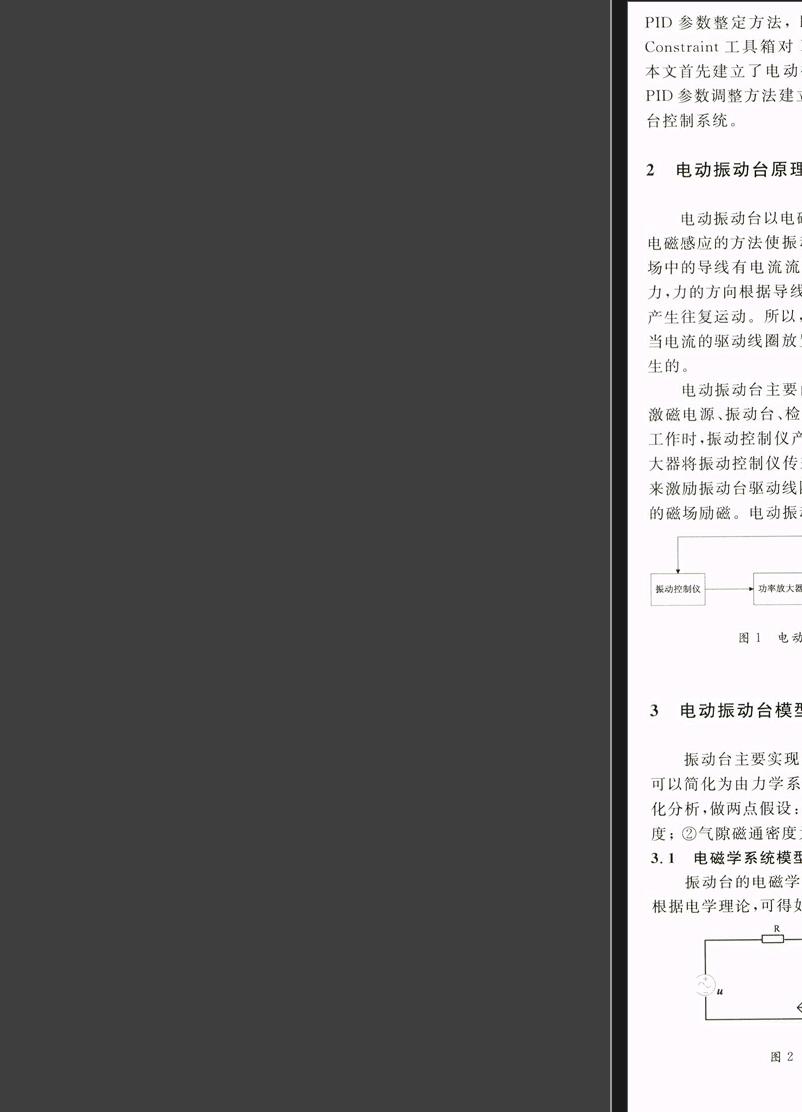
电动振动台主要由振动控制仪、功率放大器、激磁电源、振动台、检测装置等设备组成。振动台工作时,振动控制仪产生所需的振动波形,功率放大器将振动控制仪传来的电信号放大到适当电平来激励振动台驱动线圈,激磁电源产生振动台所需的磁场励磁。电动振动台原理方框图如图1所示。
图1 电动振动台原理方框图
2 电动振动台模型的建立
振动台主要实现电-机转换,所以电动振动台可以简化为由力学系统和电磁学系统组成。为简化分析,做两点假设: ①电动振动台只有一个自由度; ②气隙磁通密度为常数[3]。
2.1 电磁学系统模型
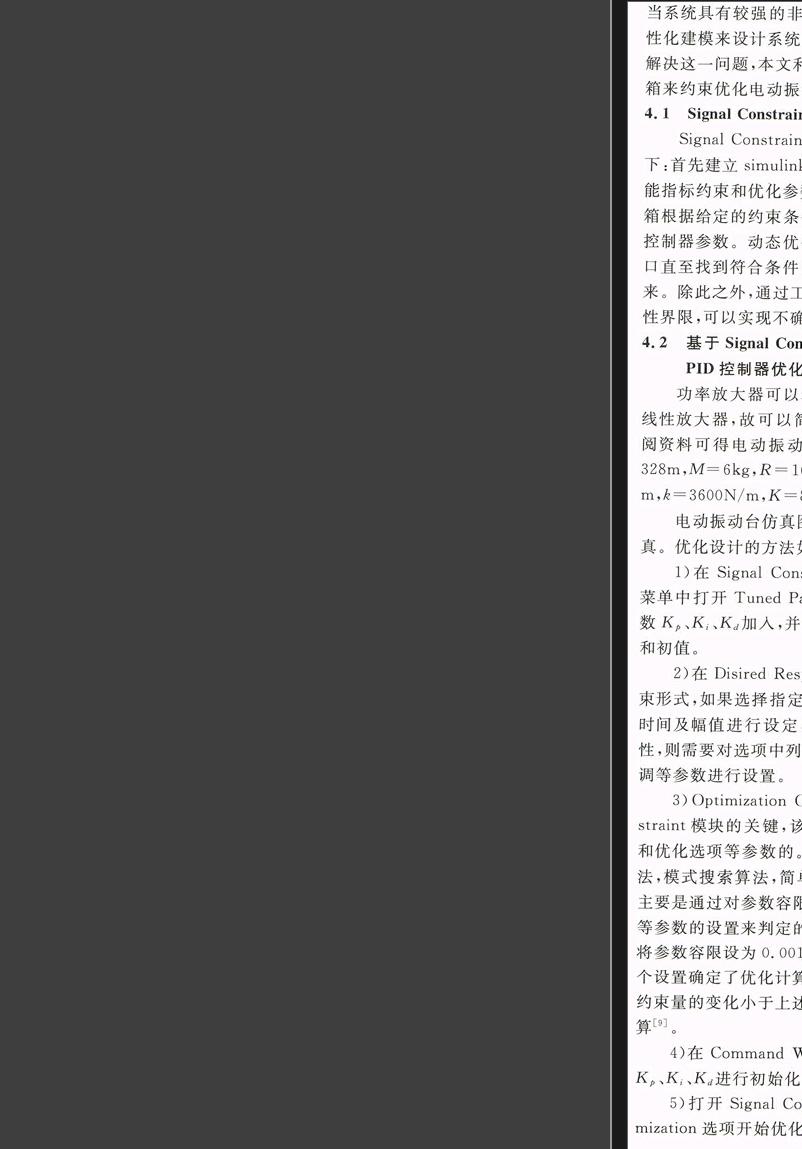
振动台的电磁学系统模型简化结构图2所示。根据电学理论,可得如下表达式:
其中,u表示功率放大器施加于动圈两端的电压,R表示动圈等效电阻,L表示动圈等效电感,B表示气隙磁通密度,F表示产生的推动力, x表示台面位移,l表示动圈等效长度,i表示动圈驱动电流,e表示动圈产生的反电动势。
2.2 力学系统模型
振动台的力学系统模型简化结构图如图3所示。根据力学理论,可得如下表达式:
图3 力学系统模型
(4)
其中,M表示电枢和工作台面的质量,c表示阻尼系数,k表示弹性系数。
2.3 电动振动台模型
电动振动台由电磁学系统和力学系统构成,将(1)、(2)、(3)和(4)式联立得:
(5)
对(5)式进行拉普拉斯变换,可得输入电压u与振动位移x的传递函数G(s):
(6)
3 电动振动台控制器的设计
传统的PID控制因其具有原理简单、鲁棒性强等优点而被广泛应用在控制领域中,因此,本文在进行电动振动台设计时采用PID控制。PID控制器的设计是对其参数的调节,而传统PID参数整定方法不但繁琐而且不适用于非线性系统[4]。当系统具有较强的非线性特性时, 利用常规的线性化建模来设计系统时,控制效果都比较差。为了解决这一问题,本文利用MATLAB信号处理工具箱来约束优化电动振动台的PID控制器参数。
3.1 Signal Constraint工具箱简介
Signal Constraint工具箱的基本工作原理如下:首先建立simulink仿真图,将PID控制器的性能指标约束和优化参数在工具箱里进行设置,工具箱根据给定的约束条件调用对应函数来优化计算控制器参数。动态优化的结果显示在性能曲线窗口直至找到符合条件的最优参数并将参数显示出来。除此之外,通过工具箱可以指定变量的不确定性界限,可以实现不确定性鲁棒控制系统的设计。
3.2 基于Signal Constraint工具箱的电动振动台PID控制器优化设计
功率放大器可以看作一个具有饱和特性的拟线性放大器,故可以简化为比例环节K[5,6,7]。查阅资料可得电动振动台参数如下:B=1.5T,l=328m,M=6kg,R=16Ω,L=8mH,c=2.4N·s/m,k=3600N/m,K=80[8]。
电动振动台仿真图建好以后,开始对其进行仿真。优化设计的方法如下:
(1)在Signal Constraint模块的Optimization菜单中打开Tuned Parameters选项,将待调整参数Kp、Ki、Kd加入,并设定待调整参数的调整范围和初值。
(2)在Disired Response选项中选取所需的约束形式,如果选择指定参考信号,要对参考信号的时间及幅值进行设定,如果选择指定阶跃响应特性,则需要对选项中列出的上升时间、调整时间、超调等参数进行设置。
(3)Optimization Options选项是Signal Constraint模块的关键,该选项主要是设定仿真方法和优化选项等参数的。优化选项包括梯度下降算法,模式搜索算法,简单搜索算法三种。优化结束主要是通过对参数容限、约束容限和最大迭代次数等参数的设置来判定的。本文选择默认优化选项。将参数容限设为0.001,约束容限设为0.001,这两个设置确定了优化计算的停止准则,只有优化量和约束量的变化小于上述两个容限时,才停止优化计算[9]。
(4)在Command Window窗口对待调整参数Kp、Ki、Kd进行初始化:Kp=2.9、Ki=50、Kd=0。
(5)打开Signal Constraint模块的Start optimization选项开始优化。
4 仿真试验
4.1 阶跃响应试验
本文利用上述电动振动台模型进行实验仿真,图4为Simulink仿真图。要求的阶跃响应性能指标如下:调整时间90s, 上升时间30s, 稳态误差百分数5% , 超调量百分数10%, 振荡负幅值百分数1%。图5为动态优化结果图,动态的优化结果显示在该窗口中,直至找到最优化参数。图6为优化后的阶跃响应曲线。
图4 Simulink仿真图
图5 动态优化结果图
图6 优化后阶跃响应曲线
通过优化后的阶跃响应曲线可以看出,利用Signal Constraint工具箱优化后,可以得到一组性能良好的PID控制参数:超调量小,具有良好的动态性能。优化后的结果完全满足设定的要求。优化后得到的PID调节参数如下:Kp=14.4855、Ki=41.8144、Kd=34.3714。
4.2 正弦响应试验
根据上面的PID参数对电动振动台系统进行正弦响应试验。将20Hz的单位正弦信号施加给电动振动台系统,得到图7所示的正弦响应曲线图。
图7 正弦响应曲线
将20Hz和50Hz的不同幅度的正弦信号施加给振动台系统,得到如图8所示的随机正弦响应曲线图。
图8 随机正弦响应曲线
通过正弦响应曲线和随机正弦响应曲线可以看出:电动振动台系统可以很好地复现和跟踪给定的输入信号,具有良好的模拟效果。
5 结论
本文首先研究了电动振动台的力学系统和电磁学系统,并在此基础上确立了电动振动台的简单模型,利用MATLAB的Signal Constraint工具箱对PID控制器进行优化设计。选用这种优化设计方法,能够简单有效地整定出PID控制器参数。仿真结果表明该方法优化设计的控制器,具有良好的控制特性,能够很好地模拟所给定的信号,验证了利用Signal Constraint工具箱对PID控制器进行优化设计方法的可行性和准确性,为下一步搭建物理试验平台奠定了基础。
6 参考文献
[1] 王述成.振动试验实时控制系统[D].浙江:浙江大学,2006.
[2] 江运泰,自主创新、奋发图强,环境技术 2,p9-12,2007.
[3] 郭继峰,任万滨,康云志,翟国富. 电动振动台模型辨识方法及其应用的研究[J].振动与冲击.2011,30(07):241-244.
[4] Shamsuzzoha, M., Skogestad, S. The setpoint overshoot method: A simple and fast closed-loop approach for PID tuning[J], Journal of Process Control, 20, 1220-1234. 2010.
[5] 骆涵秀.试验机的电液控制系统[M].北京: 机械工业出版社,1991.
[6] 李丙才 ,张荣.智能电液伺服控制系统的研究[J].科学技术与工程.2011,11(18):4377-4379.
[7] 王桂霞.基于MATLAB/Simulink的随动控制系统建模与仿真[J].船舶工程.2012,34(03):54-57.
[8] 孟繁莹.大型电动振动台动力学分析与数值模拟研究[D].北京:北京工业大学,2013.
[9] 袁桂丽, 王田宏, 王子杰, 金慰刚.基于MATLAB 的NCD 工具箱在汽轮机调速系统中的应用研究[J].汽轮机技术.2004,46(05):369-371.
作者简介:孙庆克(1988.01-),男,在读硕士研究生 研究方向:船舶与港口自动化技术。
