一类混沌系统的Hopf分岔控制
2015-09-09曹逸凡吴凤娇
曹逸凡+吴凤娇
摘 要:针对带参数的混沌系统,运用Routh-Hurwitz判据及Hopf分岔理论研究了系统存在的动力学行为,设计了状态反馈控制器对系统进行Hopf分岔控制。分析了系统参数及控制参数分别对系统稳定性与Hopf分岔类型的影响,得到了系统稳定及不发生Hopf分岔的系统参数条件。研究结果表明:控制器中的线性控制部分及非线性控制部分均能改变系统的分岔行为,使系统渐近稳定。数值仿真证明控制器设计的有效性。
关键词:带参数混沌系统;渐近稳定性;Hopf分岔;Hopf分岔控制
中图分类号:O231.2 文献标识码:A
Hopf bifurcation control of a chaotic system
CAO Yi-fan,WU Feng-Jiao
(College of Water Resources and Architectural Engineering;Northwest A&F University,Yangling,Shanxi 712100,China)
Abstract: Using Routh-Hurwitz criterion and hopf bifurcation theory,the dynamical behaviors of a chaotic system with parameters are investigated in this paper and also a feedback controller is designed to stabilize the system.The effects of the system parameters and controller parameters on the system stability and hopf bifurcation type are discussed,and then the system parameter conditions that the system is stable with no hopf bifurcation are found out.The results indicate that both of the linear control part and nonlinear control part in the controller can change the bifurcation behaviors of the system,which make the system asymptotically stable. Finally the numerical simulation proves the effectiveness of the controller.
Key words:Chaotic system with parameters; Asymptotic stability; Hopf bifurcation; Hopf bifurcation control
0 引言
混沌是非线性系统的一种特殊的运动状态,对初始条件敏感,又具有随机性但又不是真正的或完全的随机运动。往往混沌运动是有害的,人们尽量回避混沌行为,并设法抑制混沌的出现。混沌控制是当前混沌运动研究的一个新领域,是实现混沌应用的关键环节,目前,其控制尚无统一的理论和方法。文献[1-8]用自适应控制、滑模控制方法实现混沌系统有限时间稳定控制。Abdelkader Senouci等(2014)[10]对一混沌系统设计了T-S(Takagi-Sugeno)模糊模型及模糊控制器,进行了仿真验证。Jun Yoneyama(2013)[11]提出了一种并行分布补偿算法(PDC)的非线性控制设计,仿真验证了方法可行性。贾培艳等(2013)[12]采用并行分布补偿算法,结合线性矩阵不等式给出了一类离散混沌系统稳定的充分条件。Yibei Nian等(2012)[13]提出了基于T-S模糊模型及自适应控制的一类混沌系统控制模型,Henon图验证了方法的实效性。Li Yi-Min等(2012)[14]提出了控制非线性系统的一新的模糊逻辑系统,正确性得到仿真验证。Yang Liu等(2011)[15,16]提出了基于T-S模型的混沌系统脉冲控制方法,并进行了数字模拟验证。如何选择系统参数或控制参数来规避混沌或抑制混沌,上述文献未作探讨,有鉴于此,本文设计状态反馈控制器对系统进行分岔控制,实现系统稳定。首先利用Routh-Hurwitz判据及Hopf分岔理论研究系统动力学行为;然后设计状态反馈控制器对系统进行Hopf分岔控制,避免系统混沌的发生。
1 系统及动力学特征
考察带参数含两个平方项的三维混沌系统[17]
(1)
式中,a、b、c、l、h、k为实数,且bcl(h+k)>0。
1.1 平衡点及稳定性
1.1.1 O(0,0,0)点的稳定性
定理1 对于a2+4bc>0,若a>0,b<0,c>0,平衡点O(0,0,0)为稳定结点;若a<0,b>0,c<0,平衡点O(0,0,0)为不稳定结点;若a>0,b<0,c<0,平衡点O(0,0,0)为不稳定鞍点。
证明 系统(1)在O(0,0,0)点的特征方程为
(λ+c)( λ2+aλ-ab)=0
因a2+4bc>0,则该方程有3个实根λ1= -c,。
若a>0,b<0,c>0,有λ1<0,λ2<0,λ3<0,故平衡点O(0,0,0)为稳定结点。
若a<0,b>0,c<0,有λ1>0,λ2>0,λ3>0,故平衡点O(0,0,0)为不稳定结点。
若a>0,b<0,c<0,有λ1>0,λ2>0,λ3<0,故平衡点O(0,0,0)为不稳定鞍点。
证毕。
1.1.2 F1与F2点的稳定性
因系统(1)关于Z轴对称,只需讨论F1点的稳定性。
对于平衡点O(0,0,0)处系统(1)Jacobian矩阵的特征方程(λ+c)( λ2+aλ-ab)=0,不论参数a,b,c如何变化,特征方程只会出现零根,始终无纯虚根,因而平衡点O(0,0,0)处不会发生Hopf分岔,下面讨论其他平衡点的分岔问题。
因F1与F2关于Z轴对称,同时系统(1)又是关于Z轴对称的,下面只考虑F1点的Hopf分岔。为方便讨论,作坐标平移变换,使F1点为新坐标系的原点。
证明 因h=k≠0,系统(4)在O1(0,0,0)点的特征方程为
λ3+(a+c)λ2+(ac+bc)λ+2abc=0 (4)
设式(5)有一对纯虚根±iβ,β>0,代入(4)式得
2abc-(a+c)β2±i(β2-ac-bc)β=0 (5)
从(5)式得到
β2=ac+bc>0 (6)
(a+c)β2-2abc=0 (7)
,满足横切条件。系统(3)在O1(0,0,0)点Hopf分岔。
证毕。
取a=2,b=6,c=1,h=1,k=1,l=1,满足Hopf分岔条件,系统(1)在平衡点处时间历程呈现增幅振荡,其为亚临界Hopf分岔。
取a=1.995,b=2,c=0.0025,h=1,k=1,l=1,同样满足Hopf分岔条件,系统(1)在平衡点F1(0.05,0.05,2)处时间历程呈等幅振荡,为超临界Hopf分岔。
2 Hopf分岔控制与分析
对于系统参数无法远离分岔面式(7)的情形,系统(1)将产生Hopf分岔,下面就a=2、b=6、c=1、h=1、k=1、l=1及a=1.995、b=2、c=0.0025、h=1、k=1、l=1两种情形进行Hopf分岔控制与分析。设计包含线性与非线性两个部分的控制器分别为
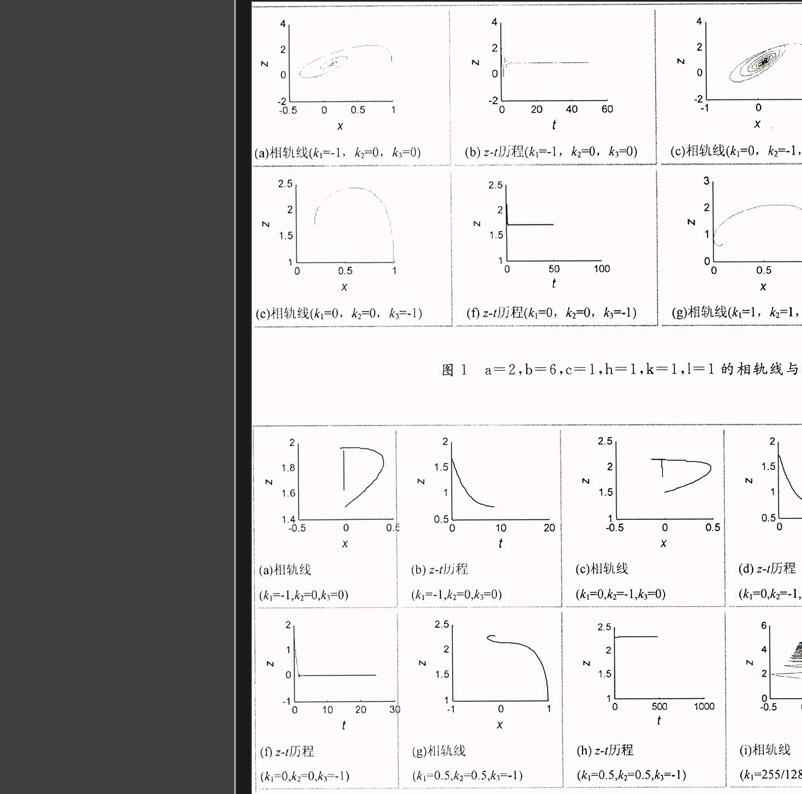
对受控系统(10)、(11)进行计算机仿真,图1、2分别为系统参数取a=2,b=6,c=1,h=1,k=1,l=1及a=1.995,b=2,c=0.0025,h=1,k=1,l=1时系统的相轨线与时间历程,前者为亚临界Hopf分岔,后者为超临界Hopf分岔。
(a)相轨线(k1=-1,k2=0,k3=0)
(b) z-t历程(k1=-1,k2=0,k3=0)
(c)相轨线(k1=0,k2=-1,k3=0)
(d) z-t历程(k1=0,k2=-1,k3=0)
(e)相轨线(k1=0,k2=0,k3=-1)
(f) z-t历程(k1=0,k2=0,k3=-1)
(g)相轨线(k1=1,k2=1,k3=-1)
(h) z-t历程(k1=1,k2=1,k3=-1)
图1 a=2,b=6,c=1,h=1,k=1,l=1的相轨线与时间历程
Fig.1 Track of x-z and waveform for t-z of (11) with a=2,b=6,c=1,h=1,k=1,l=1
当k3=0,k1与k2一个不为0,即施加单一线性控制时,如图1(a)、1(b)和1(c)、1(d)所示,系统渐近稳定;当k3<0,即施加非线性控制时,无论有无线性控制,只要k1+ k3与k2+ k3足够小,如图1(e)、1(f)和1(g)、1(h)所示,系统同样渐近稳定。表明选取线性或非线性控制增益对系统施加控制(8)后,亚临界Hopf分岔行为消失,系统趋于稳定。
(a)相轨线(k1=-1,k2=0,k3=0)
(b) z-t历程(k1=-1,k2=0,k3=0)
(c)相轨线(k1=0,k2=-1,k3=0)
(d) z-t历程(k1=0,k2=-1,k3=0)
(e)相轨线(k1=0,k2=0,k3=-1)
(f) z-t历程(k1=0,k2=0,k3=-1)
(g)相轨线(k1=0.5,k2=0.5,k3=-1)
(h) z-t历程(k1=0.5,k2=0.5,k3=-1)
(i)相轨线(k1=255/128,k2=-8,k3=-1)
(j) z-t历程(k1=255/128,k2=-8,k3=-1)
图2 a=1.995,b=2,c=0.0025,h=1,k=1,l=1的相轨线与时间历程
Fig.2 Track of x-z and waveform plot for t-z of (12) with a=1.995,b=2,c=0.0025,h=1,k=1,l=1
考察超临界Hopf分岔情形,从图2(a)~2(d)可以看出,对于k3=0,系统仅加线性控制,与图1相似,超临界Hopf分岔行为消失,系统渐近稳定,此时k1+k3=-1或k2+k3=-1,k1+k3或k2+k3较小;当k1=0,k2=0,k3=-1时,系统仅加非线性控制,如图2(e)、2(f)所示,同样超临界Hopf分岔行为消失,系统渐近稳定,此时k1+k3=-1,k2+k3=-1,k1+k3均k2+k3较小;当k1=0.5,k2=0.5,k3=-1时,受控系统(11)特征值λ=[0.8348, -2.3475, 0.0077],平衡点为不稳定鞍结点,Hopf分岔未得到控制,如图所示2(g)、2(h),此时k1+k3=-0.5,k2+k3=-0.5,k1+k3与k2+k3都较大;保持k3=-1不变,调整k1和k2,使k1=255/128,k2=-8,此时,受控系统(11)特征值λ=[-0.0116,-0.0006+3.4714i,-0.0006-3.4714i],平衡点渐近稳定,超临界Hopf分岔行为消失,如图2(i)、2(j)所示,此时k2+k3=-9,k2+k3较小。表明施加单一线性、非线性控制增益或同时施加线性与非线性控制增益,只要线性与非线性控制增益的和足够小,系统超临界Hopf分岔行为消失,系统趋于稳定。
以上表明选取适宜线性或非线性控制增益对系统施加控制后,系统Hopf分岔行为消失,系统有限时间稳定。
3 结论
针对带参数的非线性动力系统,研究了系统参数对系统稳定性的影响及Hopf分岔行为产生的条件;设计了控制器对系统进行Hopf分岔及稳定性控制。研究表明,系统参数及控制参数能规避与控制系统Hopf分岔行为。该方法为带参数非线性系统Hopf分岔分析及控制提供了借鉴。
参考文献
[1] M P Aghababa. Robust stabilization and synchronization of a class of fractional-order chaotic systems via a novel fractional sliding mode controller[J].Communications in Nonlinear Science and Numerical Simulation,2012,17(6):2670–2681.
[2] M P Aghababa, H P Aghababa. Finite-time stabilization of uncertain non-autonomous chaotic gyroscopes with nonlinear inputs[J]. Applied Mathematics and Mechanics, 2012,33(2):155–164 .
[3] M P Aghababa, H P Aghababa. Chaos suppression of rotational machine systems via finite-time control method[J].Nonlinear Dynamics,2012,69(4):1881–1888.
[4] M P Aghababa, H P Aghababa. A general nonlinear adaptive control scheme for finite-time synchronization of chaotic systems with uncertain parameters and nonlinear inputs[J].Nonlinear Dynamics,2012,69(4):1903–1914.
[5] M P Aghababa, H P Aghababa. A Novel Finite-Time Sliding Mode Controller for Synchronization of Chaotic Systems with Input Nonlinearity[J]. Arabian Journal for Science and Engineering ,2013,38(11):3221–3232.
[6] M P Aghababa. Finite-time chaos control and synchronization of fractional-order non-autonomous chaotic (hyper-chaotic) systems using fractional nonsingular terminal sliding mode technique[J].Nonlinear Dynamics,2012(1-2),69:247–261.
[7] 贾尚帅,丁千.含间隙超音速二元弹翼非线性颤振与主动控制[J].中国科学(A辑),2013,43(4):390–400.
[8] 路永坤.受扰统一混沌系统的主动自适应模糊积分滑模控制[J].物理学报,2012,61(22):1-6.
[9]Takagi T,Sugeno M.Fuzzy identification of systems and its application to modeling and control[J].IEEE Transaction on System Man Cybern,1985,15:116-132.
[10]Abdelkader Senouci, Abdelkrim Boukabou. Predictive control and synchronization of chaotic and hyperchaoticsystems based on a T–S fuzzy model[J]. Mathematics and Computers in Simulation,2014,105:62–78.
[11] Jun Yoneyama. Nonlinear control design based on generalized Takagi–Sugeno fuzzy systems[J]. Journal of the Franklin Institute,2014,351:3524–3535.
[12] 贾培艳,杨一平,柴秀丽,等. 基于T-S模糊模型的离散混沌系统的模糊控制[J].河南大学学报(自然科学版),2013,43(2):191-195.
[13] Yibei Nian,Yongai Zheng. Controlling Discrete Time T-S Fuzzy Chaotic Systems via Adaptive Adjustment[J]. Physics Procedia 2012,24:1915-1921.
[14] Li Yi Min,Sun Yuan Yuan.Type-2 T-S fuzzy impulsive control of nonlinear systems[J]. Applied Mathematical Modelling,2012,36:2710-2723.
[15] Yang Liu,Shouwei Zhao.T–S fuzzy model-based impulsive control for chaotic systems and its application[J]. Mathematics and Computers in Simulation,2011,81:2507–2516.
[16] Cheng Hu,HaijunJiang, ZhidongTeng.General impulsive control of chaotic systems based on a TS fuzzy model[J]. Fuzzy Sets and Systems,2011,174,66–82.
[17] 李福琴,涂金忠. 一类三维混沌系统的Hopf分岔[J].科学技术与工程,2010,10(5):1198-1120.
[18] 张中华,袁惠群,张宇白.一类电机系统的分岔分析与Hopf分岔控制[J]. 兵工学报,2013,34(8):1051-1056.
