自平衡多螺旋钻地机器人研究
2015-09-05简小刚朱能炯同济大学机械与能源工程学院上海201804
简小刚,朱能炯(同济大学机械与能源工程学院,上海201804)
自平衡多螺旋钻地机器人研究
简小刚,朱能炯
(同济大学机械与能源工程学院,上海201804)
针对国内外钻地机器人的研究现状,提出了一种自平衡多螺旋钻地机器人,阐述了其总体结构与工作原理,对机构转速、螺旋倾角和土升角等参数作了分析计算,并借助ANSYS-W Or k b e n c h软件对螺旋机构钻进时的土壤变形流动情况作了动力学仿真.分析结果表明,该钻地机器人通过左旋螺旋机构和右旋螺旋机构的组合有效实现了在土壤中钻进和转向的功能,为今后改装应用奠定了基础.
钻进;转向;自平衡多螺旋钻地机器人
钻地机器人是一种可在土壤环境中运动,执行穿孔、探测、取样、搜救等任务的特种机器人,由本体结构、探测系统、供能单元、控制系统等构成,一般要求其体积小,自推进、可转向,运动灵活,操控方便等.钻地机器人的本体结构既可搭载传感器,又能够按预定轨迹在土壤中钻掘行进,这就需要有一套能够适应特定土壤环境的有效钻进和转向机构.当前,国内外已针对各种地下钻探任务对钻地机器人展开研究,但多数尚处于理论研究或试验阶段.
要在土壤中按规划轨迹钻进,钻地机器人必须同时满足钻进和转向两个功能.表1为各种钻地机器人钻进方法的比较与分析:反复冲击挤压式钻地机器人轴向尺寸大,转向半径大,冲击振动影响大,多用于非开挖工程领域;仿生蚯蚓类钻地机器人可在体节之间设置轴向伸缩机构以控制前进与转向,但钻进效率与可靠性较差[1];螺旋类机器人借助螺旋驱动可实现高效钻进,但转向困难.此外,还有一些激光钻进、等离子体通道钻进和粒子冲击钻进等钻进技术与设备,如能实现小型化,必将大大促进钻地机器人的发展和应用.
表2为国内外各种钻地机器人转向方法的分析与比较.由表2可知,外部卡阻式转向受偏转力矩影响,可靠性差、转向半径大;体节间偏转式转向则存在转向力矩不足、机构复杂、转向过程中容易卡死等问题.因而,如何提供一种高效的转向机构是钻地机器人研制中急需解决的问题.

表1 国内外钻地机器人的钻进方法Tab.1 Drilling methods of subsurface drilling robot
1 自平衡多螺旋钻地机器人总体设计
基于上述钻地机器人钻进和转向方法的分析比较,针对目前存在的问题,本文提出一种自平衡多螺旋钻地机器人.该钻地机器人通过左旋螺旋机构和右旋螺旋机构的组合,有效实现了在土壤中钻进和转向的功能,适于在松散泥土或浅层土壤中钻进,能根据预定轨迹和位置反馈信息并调整钻进方向.
自平衡多螺旋钻地机器人主要包括钻地机器人本体、供电及通信线缆、钻进距离检测装置、供能单元、单片机系统、P C系统等[8],如图1所示.在地面较为平坦的情况下,该钻地机器人无需外在辅助装置即可钻入土壤.
钻地机器人本体结构如图2所示,主要包括3个螺旋机构及相应的固定支架杆件,其中的螺旋机构含有左旋螺旋机构和右旋螺旋机构.螺旋机构内安装有行星齿轮减速电机,螺旋机构尾部设置有储物腔,可搭载传感器,包括姿态传感器、金属探测器等.固定支架杆件的截面为菱形,使其在钻进方向上呈锐角,这样有利于固定支架杆件切入土壤,减小钻进或后退时的阻力.螺旋机构尾部拖曳有供电及通信线缆,借助地面供能单元和计算机控制系统可实现供电与信号传递.
螺旋机构在土壤中旋转时,既受到与转向相反的土壤阻力矩,又受到轴向的土壤推力作用.如图3所示,对于右旋螺旋机构,其转向与螺旋叶片所提供的推力符合右手定则,而对于左旋螺旋机构,其关系则符合左手定则.当钻地机器人需要钻进或后退时,通过控制减速电机转向使得左旋螺旋机构和右旋螺旋机构反向旋转,此时两种螺旋机构受到的轴向推力方向一致,一同驱动钻地机器人向前或向后运动,而左、右旋螺旋机构分别受到的土壤阻力矩因方向相反而有得到部分抵消,进而减小了钻地机器人整体在钻进过程中受到的偏转力矩.当钻地机器人需要转向时,通过改变指定减速电机的转向,进而改变相应螺旋机构所受到的轴向推力的方向,此轴向推力与其他螺旋机构所受到的轴向推力方向相反,在空间上形成力矩,驱动钻地机器人发生转动.

表2 国内外钻地机器人的转向方法Tab.2 Steering methods of subsurface drilling robot

图1 自平衡多螺旋钻地机器人的构成Fig.1 Overall structure of the proposed robot
钻地机器人需要在土壤中按照预定轨迹行进,这就要求钻地机器人将其钻进过程中的运动状态信息反馈给计算机控制系统以控制其钻进轨迹.根据自平衡多螺旋钻地机器人的机械结构和运动控制的要求,所需检测项目、作用及选用的传感器类型如表3所示.

表3 自平衡钻地机器人的基本检测项目Tab.3 Detection test items of the proposed robot
计算机控制系统采用两级结构,上位机使用P C机,下位机采用80C 51单片机,上、下位机均置于地面.操作人员在上位机规划预定轨迹并向下位机发送控制命令,下位机根据收到的命令控制行星齿轮减速电机的运转,并采集钻地机器人的电流、钻进距离、姿态信息等,将这些信号进行处理后发送给上位机,操作人员可通过人机交互界面实时显示的钻地机器人实际状态数据进一步修改控制命令,进而保证钻地机器人沿着预定轨迹运行,其控制流程如图4所示.

图2 钻地机器人本体结构示意图Fig.2 Body structure of the proposed robot
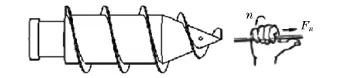
图3 右旋螺旋机构转向和推进力的关系Fig.3 Relationship between rotation direction and axial thrust for right-hand auger mechanism
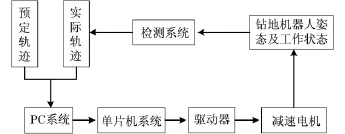
图4 自平衡钻地机器人控制系统流程图Fig.4 Control flow chart of the proposed robot
2 螺旋机构转速、螺旋倾角和土升角的分析计算
研究表明,螺旋钻进时,孔壁上产生的剪切阻力和叶片表面产生的摩擦阻力消耗了大部分输入能量,其他则可忽略[15].据此采用临界转速经典模型,取螺旋叶片边沿的土屑微元进行受力分析[16],建立的力学模型如图5所示.图中dN为螺旋叶片对土壤微元的支持力;dF1为螺旋叶片对土壤微元的摩擦力:dF2为孔壁对土壤微元的摩擦力;dG为土壤微元自身重力;β为螺旋叶片的螺旋倾角;ψ为土壤微元绝对速度与水平面的夹角,反映了螺旋机
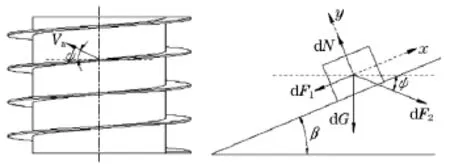
图5 螺旋机构输送土壤的力学模型Fig.5 Mechanical model of auger mechanism delivering soil



构实际输送土壤的速度.式中:μ1为土壤与螺旋叶片的摩擦系数;μ2为土壤之间的摩擦系数;m为土壤微元的质量;g为重力加速度;r为土壤微元与旋转中心轴之间的距离;ωa为土壤微元的绝对角速度,ωa=ω-Vrc Osβ r,其中的ω为螺旋机构的旋转角速度,Vr为土壤微元相对于螺旋叶片的相对速度.
根据图中x,y方向上的受力平衡,可得:
d F2·c Os(β+ψ)-d F1-d G·s i nβ=0(4)
d N-d G·c Osβ-d F2·s i n(β+ψ)=0(5)
模拟螺旋钻进实际情况,土壤微元的速度合成如图6所示,图中的Va为土壤微元的绝对速度,Ve为土壤微元牵连点的牵连速度.

图6 土壤微元的速度关系Fig.6 Velocity decomposition of soil clod
Ve和Vr在垂直于Va方向上的分量相等,有:
即:

得:


由以上各式,计算得:

由MAT L A B编程计算,可得螺旋机构转速、螺旋叶片倾角和土升角三者之间的关系,如图7所示.在相同土升角的情况下,螺旋叶片的倾角存在最优值,此时螺旋机构所需的转速最低;随着土升角的增大,钻地机器人在钻进过程中所对应的螺旋叶片倾角最优值也应随之增大;当螺旋叶片倾角一定时,随着土升角的上升,螺旋机构所需的转速将急剧上升,因而,在外部驱动力有限的情况下,不宜设计过大的土升角.
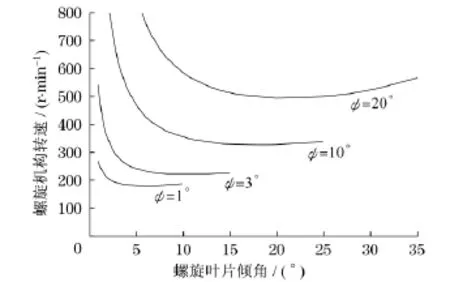
图7 螺旋机构转速、螺旋叶片倾角和土升角之间的关系Fig.7 Relationship of rotation speed,helical angle and delivery angle
3 螺旋钻进仿真分析
本文使用ANSYS-W Or k b e n c h中的显示动力学模块进行模拟分析.根据前面分析结果,在S Ol i d W Or k s软件中分别对螺旋机构和土壤进行三维建模,再将二者形成装配体,然后将该装配体作为螺旋钻进仿真分析的几何模型,以P a r a s Ol i d的文件格式导入W Or k b e n c h中进行仿真分析.设置螺旋机构材料为材料库中的S t r u c t u r a l S t e e l,土壤材料为材料库中的S A N D.对螺旋机构作用区域附近的土壤网格进行细化.螺旋机构和土壤之间的接触面类型为f r a c t i On a l,静摩擦系数0.35,动摩擦系数0.3.为螺旋机构沿轴向指向土壤施加30r a d/s的转速,土壤底面固定,忽略重力的影响,设置仿真时间为0.2s.
图8为土壤的位移变化情况.由图8可见,靠近地表部分的土壤最先发生较大位移,被螺旋叶片挖出地表,变形区域逐渐往下扩展,最后充满整个钻头区域,土壤逐渐往上流动.这是由于靠近地表土壤未受到其他机构或土壤的挤压或阻碍作用,最容易发生变形和位移,随着这部分的变形移动,紧挨着的深层土壤也开始发生变形移动,最后延续至钻尖区域.这也证实了螺旋钻进切削排土的可行性.
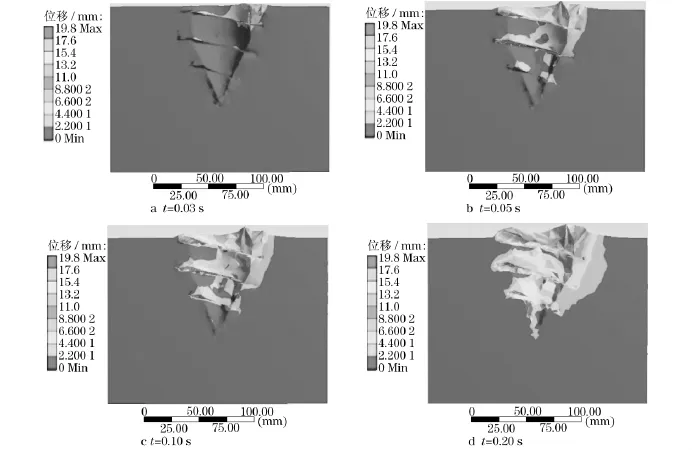
图8 螺旋钻进时的土壤变形流动Fig.8 Deformation and flow of soil when the auger mechanism drilling
4 结语
本文在分析总结国内外钻地机器人钻进和转向方法的基础上,提出了一种自平衡多螺旋钻地机器人,其通过左旋螺旋机构和右旋螺旋机构的组合,有效实现了在土壤中钻进和转向的功能,并可以根据检测到的机器人实际位置和姿态信息不断调整控制参数,使其按照预定轨迹钻进.经螺旋机构转速、螺旋叶片倾角和土升角参数分析计算以及螺旋钻进仿真分析,证实该钻地机器人可用于松散泥土或浅层土壤中钻进,经适当搭载改装后可完成不同任务,具有很大的应用前景.
[1] 简小刚,王叶锋,杨鹏春.基于蚯蚓蠕动机理的仿生机器人研究进展[J].中国工程机械学报,2012,10(3):359-363.
JIAN Xiaogang,WANG Yefeng,YANG Pengchun.Research on a bionic robot based on the mechanism of earthworm[J].Chinese Journal of Mechanical Engineering,2012,10(3):359-363.
[2] 徐宝富,陆敏恂.地下穿孔技术在同济的研究与进展[J].建筑机械,1999(6):26-28.
XU Baofu,LU Minxun.The research and development of underground perforation technology in Tongji University[J]. Construction Machinery,1999(6):26-28.
[3]SEWERYN K,GRYGORCZUK J,WAWRZASZEK R,et al. Low velocity penetrators (LVP)driven by hammering action—Definition of the principle of operation based on numerical models and experimental tests [J].Acta Astronautica,2014,99:303-317.
[4] 张英,孙虎,胡勇,等.水下仿生拱泥机器人方案研究[J].武汉理工大学学报:信息与管理工程版,2005,27(4):43-46.
ZHANG Ying,SUN Hu,HU Yong,et al.Project design of a underwater bio-mimetic move-in-mud robot[J].Journal of Wuhan University of Technology:Engineering Information and Management,2005,27(4):43-46.
[5]ABE R,KAWAMURA Y,KAMIJIMA K,et al.Performance evaluation of contra-rotating drill for DIGBOT[C]//SICE Annual Conference 2010,Proceedings of IEEE.[S.l.]: IEEE,2010:885-888.
[6]OMORI H,MURAKAMI T,NAGAI H,et al.Development of a novel bio-inspired planetary subsurface explorer:Initial experimental study by prototype excavator with propulsion and excavation units [J].Mechatronics,IEEE/ASME Transactions on,2013,18(2):459-470.
[7]RICHARDSON R C,NAGENDRAN A,SCOTT R.The sweep-extend mechanism:A 10-bar mechanism to perform biologically inspired burrowing motions[J].Mechatronics,2011,21(6):939-950.
[8] 简小刚,李晓华,张勇.地下螺旋钻进机器人探测系统的研究进展[J].中国工程机械学报,2013,11(5):441-445.
JIAN Xiaogang,LI Xiaohua,ZHANG Yong.The researchprogress of detection system of subsurface drilling robot[J].Chinese Journal of Mechanical Engineering,2013,11(5):441-445.
[9] 冯士伦,王建华,林杨,等.蠕动爬行攻泥机构转向工作特性的有限元分析[J].船舶工程,2003,25(5):32-34.
FENG Shilun,WANG Jianhua,LIN Yang,et al.FEA on steering performance of a peristaltic crawling-in-mud institution[J].Ship Engineering,2003,25(5):32-34.
[10] 颜兵兵.拱泥仿生机器人系统设计及其虚拟样机研究[D].哈尔滨:哈尔滨理工大学,2008.
YAN Bingbing.Design and virtual prototype research of a bionic move-in-mud robot[D].Harbin:Harbin University of Science and Technology,2008.
[11] 北京航天航空大学.反螺旋双驱异形机器 人:中国,CN1406723A[P].2001-08-24.Beihang University.A anti-spiral dual-drive robot:China,CN1406723A[P].2001-08-24.
[12] 王叶峰.一种自推进钻地机器人的转向机构研究[D].上海:同济大学,2013.
WANG Yefeng.Steering mechanism research of a selfpropelled auger drilling robot [D].Shanghai:Tongji University,2013.
[13] 魏洪兴,孟庆鑫,王田苗.拱泥机器人原理样机的研制[J].中国造船,2003,44(1):89-93.
WEI Hongxing,MENG Qinxin,WANG Tianmiao.Sample machine development of a move-in-mud robot[J].Ship Building of China,2003,44(1):89-93.
[14] MYRICK T M,GOREVAN S.Self-propelled instrumented deep drilling system:U.S.Patent 7,055,625[P].2006-06-06.
[15] 赵伟民,顾迪民.螺旋钻具上的土的动力分析[J].哈尔滨建筑大学学报,1999,32(4):90-93.
ZHAO Weimin,GU Dimin.Dynamic analysis of soil on the screw drill tool[J].Journal of Harbin University of Civil Engineering and Architecture,1999,32(4):90-93.
[16] 谭松成,段隆臣,黄帆,等.模拟月壤螺旋钻进力载特性分析[J].探矿工程:岩土钻掘工程,2014,41(9):81-84.
TAN Songcheng,DUAN Longchen,HUANG Fan,et al.Simulation and analysis on mechanical property of auger drilling in lunar soil [J].Prospecting Engineering:Geotechnical Drilling and Digging Engineering,2014,41(9):81-84.
Study on self-balancing multi-auger subsurface drilling robots
JIAN Xiao-gang,ZHU Neng-jiong
(School of Mechanical Engineering,Tongji University,Shanghai 201804,China)
Pertaining to the advances of domestic and foreign subsurface drilling robots,a self-balancing multi-auger subsurface drilling robot is proposed.By summarizing the overall structure and working principle,the rotary speed,helical angle and delivery angle of the auger mechanism are analyzed and computed.Based on ANSYS-WorkbenchTM,the soil deformation and flooding during drilling process are dynamically simulated on helical mechanism.Therefore,it is found from analysis results that a combination of laevorotary and dextrorotary mechanisms can effectively enhance soil drilling and steering functions forrobot modification.
drilling;steering;self-balance multi-auger subsurface drilling robot
T P 242
A
1672-5581(2015)06-0515-06
中央高校基本科研业务费专项资金资助项目(20140750)
简小刚(1975-),男,副教授,工学博士.E-mail:jianxgg@tOngji.edu.cn
