电动汽车动态路面驱动防滑控制与仿真
2015-08-30陈泽宇焦斌赵广耀周淑文
陈泽宇,焦斌,赵广耀,周淑文
(1.吉林大学 汽车仿真与控制国家重点实验室,吉林 长春,130025;2.东北大学 机械工程与自动化学院,辽宁沈阳,110819)
1 车辆-地面系统模型
图1所示为电动汽车动力系统结构,电机驱动系统是整车唯一的牵引力来源,锂离子电池组为主能量源。由于当前锂离子电池容量难以满足行驶里程的要求,因此发动机与发电机组成辅助能量源,在电池容量不足时输出能量,延长行驶里程。
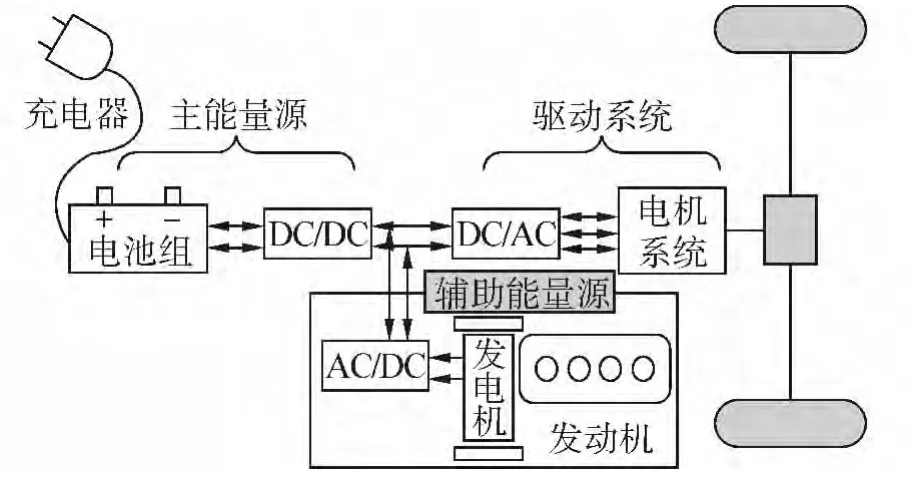
图1 电动汽车系统结构示意图Fig.1 Schematic structure of EV
1.1 驱动系统模型
图2所示为电机驱动系统的效率特性图。本文研究加速过程中的ASR控制问题,因此建模时只考虑电机输出正力矩的情况,采用一阶延迟环节对电机力矩的动态过程进行简化,同时考虑电池最大放电功率对电机力矩的限制,得到电机输出力矩如下:

式中:Tm为电机输出力矩,Tm*为电机目标力矩,ωm为电机转速,Pmax为电机最大输出功率,s是电池组荷电状态(state of charge,SOC)、温度tb和电机效率ξm的函数,τ为电机转矩动态响应时间常数。

图2 电机驱动系统特性曲线Fig.2 The characteristic curve of motor drive system
1.2 车辆动力学模型
为了便于问题分析,对建模过程进行适当简化,假设在控制过程中不存在驾驶员转向操作,且忽略直驶时左右两侧车轮所受地面作用力的差异,得到1/2车辆简化模型如下:


式中:m为整车质量,Jw为前轮及传动系转动惯量,u为车速,ω为驱动轮转速,Fx为轮胎与地面之间的切向力,Fμ为整车所受滚动阻力与空气阻力之和,Tf为将滚动阻力换算到车轮质心处的阻力矩,r为车轮滚动半径。
由于ASR控制过程中车辆加速度较大,因此由速度变化率所导致的载荷转移不容忽视,将加速度所产生的惯性力作用在汽车质心,得到汽车驱动轮上的垂直载荷为

式中:b为汽车质心到后轴距离,L为汽车轴距,h为汽车质心高度。
中国摄影化妆造型十佳大赛,在近20年的时间里已经成功举办了8届,每次比赛都在全国甄选出众多的美业精英,促进并带动了行业潮流与美业发展。
ASR控制问题是针对加速过程中处于滑转临界状态的车轮,在这样的状态下可以假设轮胎已经达到了附着上限,因此轮胎与地面之间的切向力可以根据附着条件进行计算:

式中:μ为附着系数。
1.3 轮胎模型
建立轮胎模型对附着系数进行计算。采用Pacejka提出的魔术公式[9]对轮胎进行建模,魔术公式是利用三角函数拟合实验数据来获取轮胎-地面的半经验建模方法:

式中:D为峰值附着系数(峰值因子),C为形状系数(形状特性因子),B为刚度系数,即侧偏角趋于0时轮胎的侧偏刚度,E为曲率系数(曲线形态因子),λ为驱动轮的滑转率。
2 动态路面参数识别算法
路面识别的主要目的是辨识出当前路面的最优滑转率,即峰值附着系数所对应的滑转率。图3所示为2种不同路面的附着系数随滑转率的变化曲线,定义第k时刻附着系数对滑转率的变化率、附着系数随时间的变化率和滑转率随时间的变化率:

对任意路面来说,以最优滑转率λopt可以将曲线分成左右2个区间,当λ处在这2个区间内时,附着系数μ随λ单调变化。取t=k时刻与t=k-1时刻进行分析,如果2个时刻的滑转率均处于λopt的同一侧,则有下式成立:

由式(10)可以进一步得出

特别的,当驱动力较小、车轮处于稳态时或在ASR控制的边缘位置上时,有可能会出现滑转率和附着系数变化率同时为0的情况,即

式(11)~(13)为k时刻与k-1时刻对应的λ均处于λopt的同一侧的充分条件,反之,如果从t=k-1到t=k时刻变化的过程中经过了λopt的话,则ψ与φ所满足的条件必然与式(11)~(13)相悖。由于在λopt处附着系数μ出现极大值,因此φk与φk-1乘积为负数或零,从而得到最优滑转率的判别条件如式(14)所示。

通过上述过程可以对路面λopt进行识别,但上面的分析过程并没有考虑路面发生突变的情况,不同路面下最优滑转率不同,复杂路面下的参数识别问题的关键在于当车辆突然从一种路面驶入另一种路面时,如何快速捕捉到新路面的最优滑转率。不同路面变化下的路面识别可以归纳为两类问题进行分析:1)从高附着路面进入低附着路面情况;2)从低附着路面进入高附着路面情况。
以第一类问题为例展开论述,当车辆从高附着路面突然进入低附着路面时,如图3中的A→B1段,由于附着系数瞬间突降,由式(2)~(3)可知车速下降、轮速上升,导致λ迅速增加,而λ的增加又进一步使附着系数降低,如图3中的B1→C1段。由于此时系统中存储的最优滑转率估计值λ*opt仍然在λo2点,因此ASR控制会使附着系数从C1变化回B1,但是B1显然不是当前路面的最优点,而在C1→B1的过程中并没有遇到可以满足式(14)判定条件的点,因此λ*opt不会更新,ASR控制将抑制λ的进一步增加,无法到达真正的最优滑转率λo1。从低附着路面进入高附着路面的情况与上述过程类似,因此不再累述。
为了解决上述问题,引入动态滑转率的高估门限 λmax与低估门限 λmin,根据文献[10],绝大部分路面的最优滑转率处于5%~22%,因此令λmin=4%和λmax=21%,得到动态路面下的最优滑转率识别算法如图4所示。

图3 路面突变时最优滑转率识别Fig.3 The estimation of optimal slip ratio while road condition changes suddenly
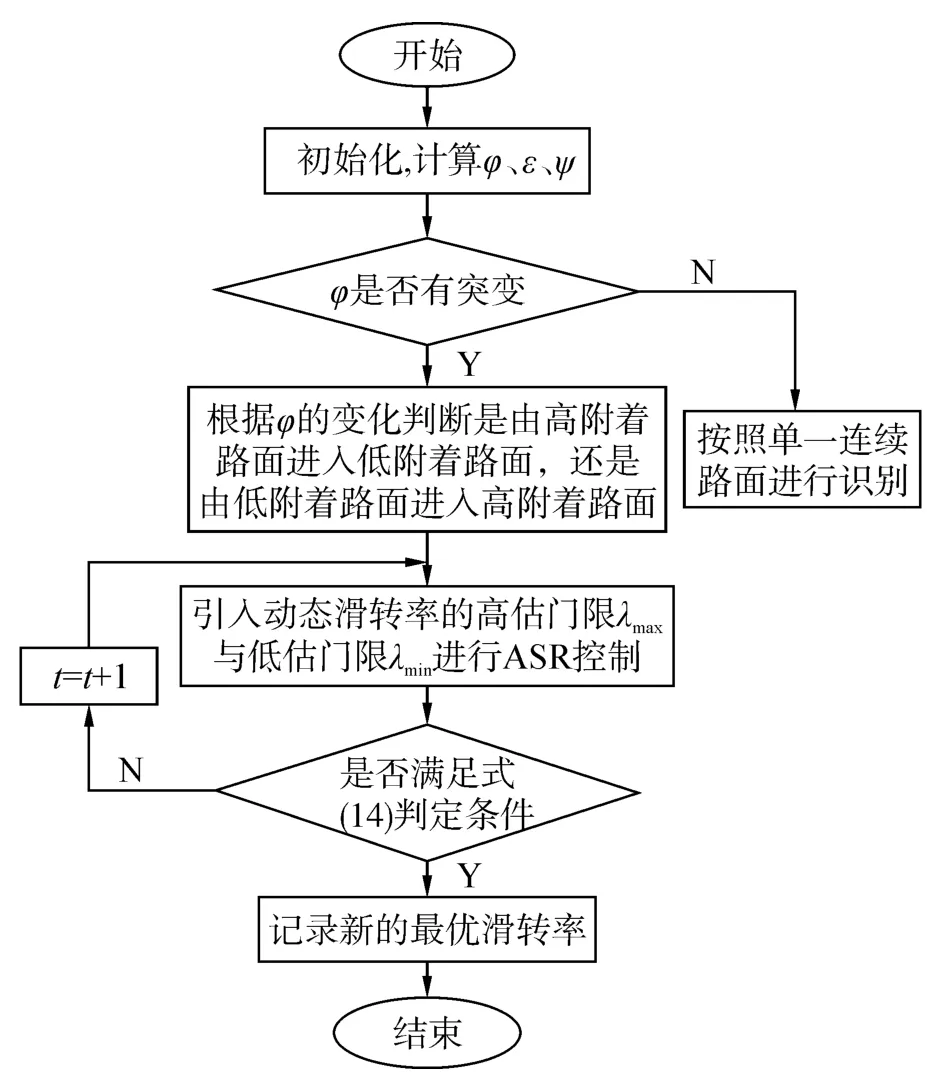
图4 动态路面最优滑转率识别算法Fig.4 The estimation algorithm of optimal slip ratio in dynamic road conditions
如果在加速过程中φ低于下限值,则表明车辆切换到了低附着路面,将系统中暂存的最优滑转率舍弃,则令代入算法,ASR控制会降低驱动力矩使滑转率继续下降,由于λmin设置地很低,所以在λ下降过程中必然能经过当前路面条件下的最优滑转率。当附着系数沿曲线变化至A1点时,满足式(14)的判定条件,从而完成一次最优滑转率估计值的更新,令反之,若φ高于上限值,则表明车辆突然进入到了高附着路面,令代入算法,ASR控制驱使λ上升,同样,由于λmax设置地很高所以可以保证在λ上升至λmax之前,必然会经过A点,促使式(14)的判定条件满足,令取代λmax成为最优滑转率估计值,从而使控制算法在复杂路面切换的情况下也可以迅速找到最新的λopt。
3 ASR控制策略
与发动机相比,电机驱动系统的动态响应速度较快、控制灵活,因此对于电动汽车而言,不需要施加制动力,而是通过调节电机力矩来进行ASR控制。在已知当前路面的λopt之后,ASR的主要作用是对λ进行控制使其围绕在λopt附近的一个很小的区域内变化以实现最大的附着系数。在控制策略设计过程中还需要考虑ASR控制与驾驶员踏板信号对驱动力的控制之间的融合关系,即:ASR控制不能影响到驾驶员对整车驱动力控制的主导权和控制效果。综合上述两个方面,得到一种驾驶员输入信号前馈控制加滑转率负反馈修正的动态ASR控制策略如图5所示。
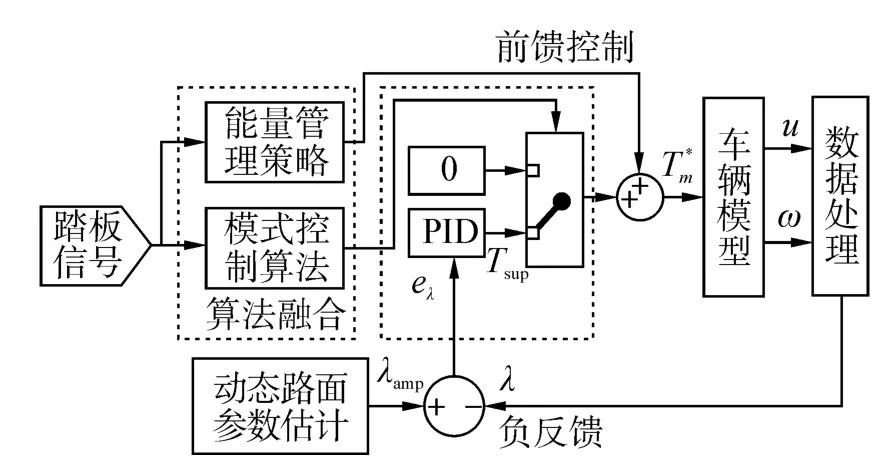
图5 电动汽车ASR控制策略结构Fig.5 The structure of ASR strategy for EV
PID控制器输出的ASR修正力矩作为驾驶员的目标转矩的调整,将其与驾驶员踏板信号产生的前馈控制力矩相加得到最终的电机目标力矩为

式中:γA为驾驶员加速踏板信号,Tm_max(ωm)为当前转速下的电机最大力矩,σR为ASR控制器的调整力矩。
为了使ASR控制可以在非加速过程,例如低速巡航或减速时正常退出,引入一个表征ASR控制系统是否生效的控制参数ξd对算法进行融合,如式(16)所示;在ASR正常工作时ξd取值为1,一旦γA低于门限值或者变化率为负时,则ξd取值为0以避免ASR对综合控制策略的干扰。

式中:Tsup为PID控制器输出的调整力矩。
4 仿真分析
仿真重点验证:在加速时,路面条件发生突变的情况下的驱动防滑控制效果,因此分别采用4种行驶工况。工况1:起步工况,2 s时由冰雪路面突变为混凝土路面;工况 2:加速工况,初始车速为20 km/h,2 s时由冰雪路面突变为混凝土路面;工况3:起步工况,2 s时由混凝土路面突变到冰雪路面;工况4:加速工况,初始车速为20 km/h,2 s时由混凝土路面突变到冰雪路面。
仿真结果如图6~9所示,可以看出,所提出的路面识别方法可以准确地估算出当前路面的最优滑转率,且在路面条件发生突变时也能够迅速逼近新的路面最优滑转率;相应地,驱动轮滑转率对最优滑转率估计值进行了很好的跟随,有效地抑制车轮的过度滑转,改善了车辆行驶稳定性,同时提高了车辆加速性能,与不带动态路面识别算法的ASR控制相比,4种工况下加速能力分别提高了 9.4%、6.6%、7.3%和 4.7%。
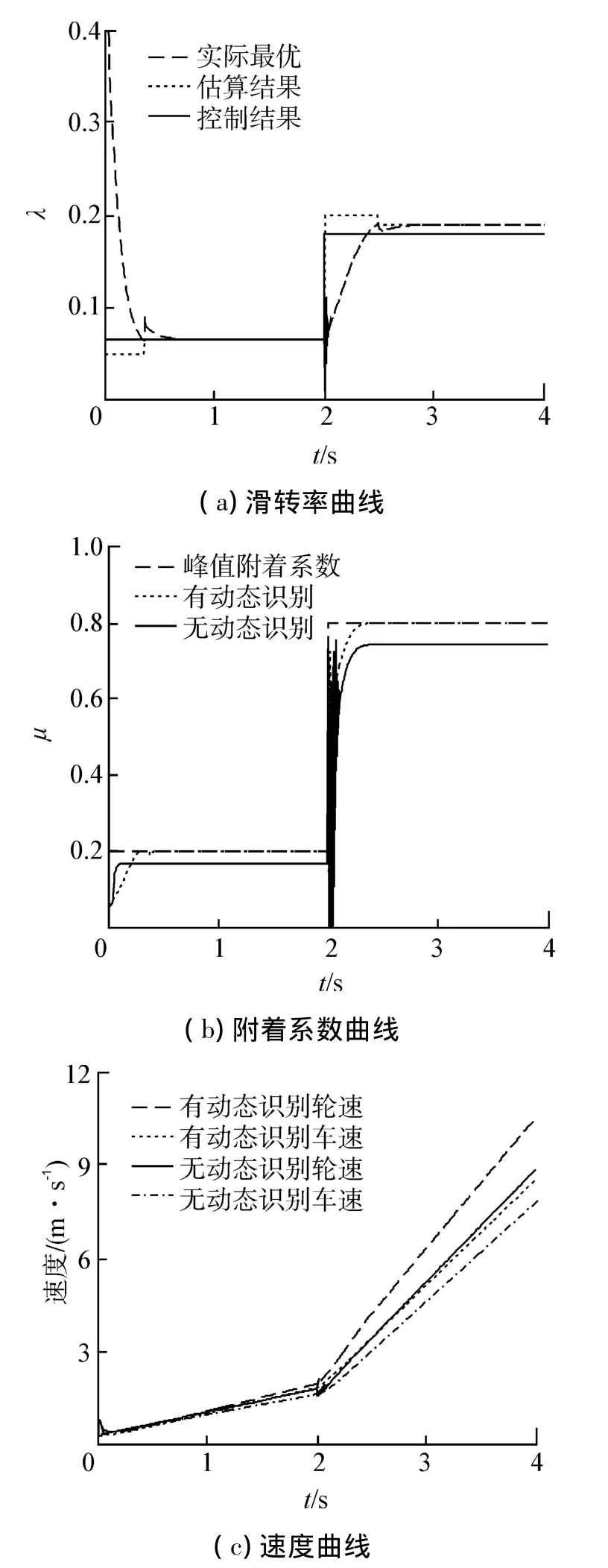
图6 工况1仿真结果Fig.6 Simulation results of condition 1

图7 工况2仿真结果Fig.7 Simulation results of condition 2

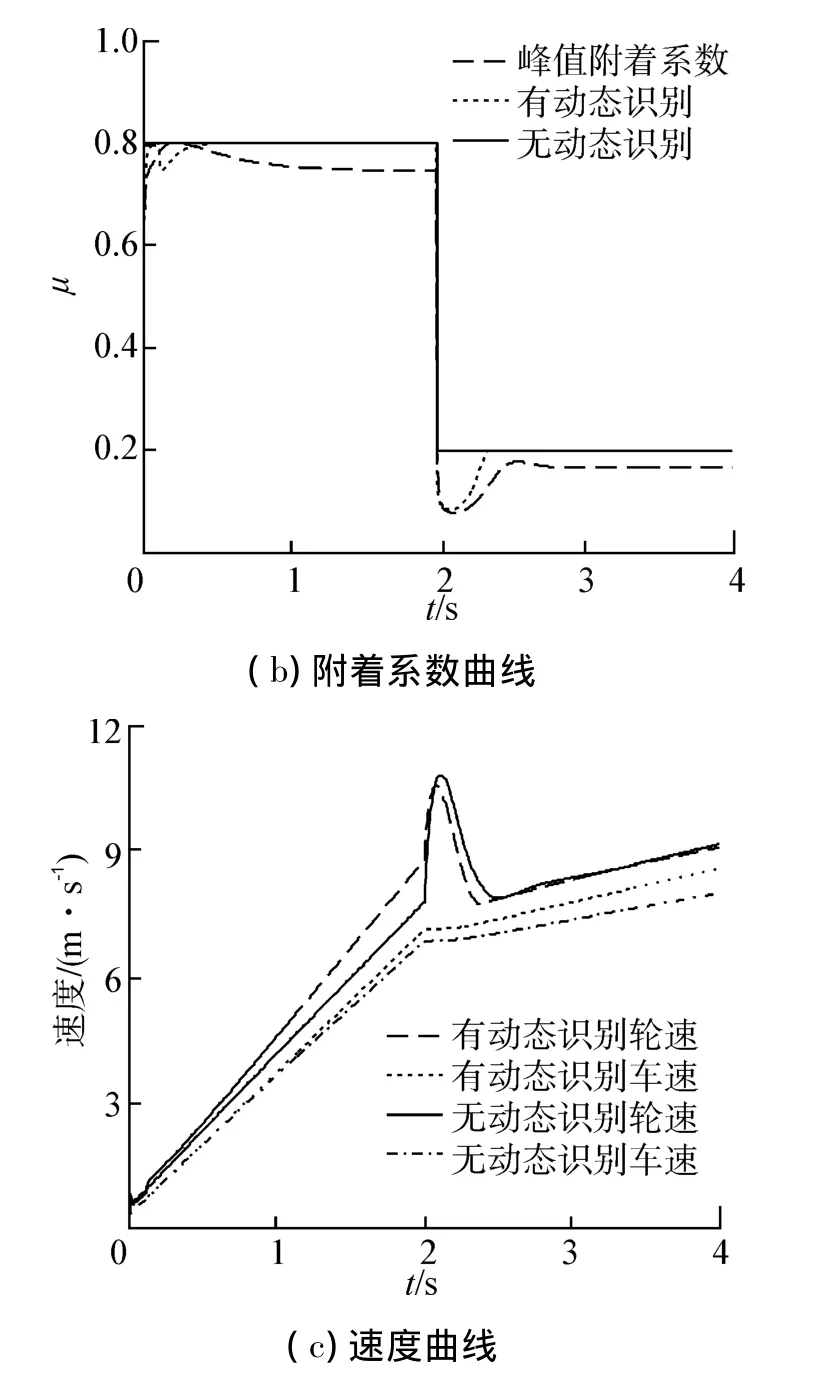
图8 工况3仿真结果Fig.8 Simulation results of the condition 3


图9 工况4仿真结果Fig.9 Simulation results of the condition 4
5 结论
1)引入高估门限λmax与低估门限λmin的方法可以使路面识别算法在路面条件发生突变的情况下迅速逼近新的最优滑转率,从而有效地解决动态路面的最优滑转率实时估计问题。
2)设计了电动汽车动态路面下的ASR控制策略,仿真结果表明,通过对电机力矩的调节来实现驱动防滑控制是可行的。在路面发生突变的情况下,所提出的动态ASR控制策略可以有效地抑制驱动轮的过度滑转,保证车辆良好的行驶稳定性。
3)所设计的动态ASR控制策略可以显著提高车辆在复杂路面行驶时的加速性能。与传统ASR控制相比,在本文所采用的4种工况下,车辆加速性能提高了约 4.7%~9.4%。
[1]SHI J,LI X,LU T,et al.Development of a new traction control system for vehicles with automatic transmissions[J].International Journal of Automotive Technology,2012,13(5):743-750.
[2]DEUR J,PAVKOVIC D,BURGIO G,et al.A model-based traction control strategy non-reliant on wheel slip information[J].Vehicle System Dynamics,2011,49(8):1245-1265.
[3]李亮,冉旭,李洪志,等.用于汽车牵引力控制的复杂路面轮胎-道路附着状态判断[J].机械工程学报,2012,48(10):109-114.LI Liang,RAN Xu,LI Hongzhi,et al.Identification of tireroad adhesion state on complicated road surface for traction control system[J].Journal of Mechanical Engineering,2012,48(10):109-114.
[4]LI H Z,LI L,HE J,et al.PID plus fuzzy logic method for torque control in traction control system[J].International Journal of Automotive Technology,2012,13(3):441-450.
[5]VASILJEVIC G,GRIPARIC K,BOGDAN S.Slip-based traction control system with an on-line road condition estimation for electric vehicles[C]//2012 IEEE International Conference on Control Applications.Dubrovnik,Croatia,2012:359-400.
[6]KAWABE T.Model predictive PID traction control systems for electric vehicles[C]//2012 IEEE International Conference on Control Applications.Dubrovnik,Croatia,2012:112-117.
[7]赵峰,罗禹贡,李克强,等.基于动态协调控制的ISG型混合动力电动汽车牵引力控制方法[J].汽车工程,2011,33(6):463-467.ZHAO Feng,LUO Yugong,LI Keqiang,et al.Traction control scheme for ISG hybrid electric vehicle based on dynamic coordinated control[J].Automotive Engineering,2011,33(6):463-467.
[8]DOUDE M,MOLEN G M.Design methodology for a rangeextended PHEV[C]//IEEE Vehicle Power and Propulsion Conference.Dearborn,Michigan,2009:817-819.
[9]PACEJKA H B,BAKKER E.The magic formula tyre model[J].Vehicle System Dynamics:International Journal of Vehicle Mechanics and Mobility,1992,21(S1):1-18.
[10]PUSCA R,AIT-AMIRAT Y,BERTHON A,et al.Modeling and simulation of a traction control algorithm for an electric vehicle with four separate wheel drives[C]//IEEE 56th Vehicular Technology Conference.Vancouver,Canada,2002:1671-1675.
