履带机器人通用地面力学模型分析与底盘设计
2015-08-30李雨潭朱华高志军程新景
李雨潭,朱华,高志军,程新景
(中国矿业大学机电工程学院,江苏徐州221116)
移动机器人越来越多的被应用在灾难救援、环境探测、反恐排爆等非结构化地形中,其能否代替人很好地执行任务取决于机器人是否能够顺利的进入事故现场。因此,机器人行走机构的设计在机器人的整体设计中具有十分重要的地位。对于三大行走机构,履带式行走机构具有结构简单、地面适应性强、控制容易等优点[1-2]。大多数移动机器人均采用履带式行走机构。但是,往往人们设计履带式行走机构时主要是侧重在其结构设计上,关注其结构的强度、刚度能不能满足设计需求[3-4],很少注重履带地面力学性能的研究。而履带地面力学性能往往影响着机器人的能量消耗、运动灵活度甚至是否能够顺利行走[5]。通常,履带的接地长度、宽度与两侧履带中心距是构成履带地面力学的主要参数。并且可以知道,在履带接地长度一定的情况下,存在一个最佳的履带宽度使转向阻力最小[6],履带接地长度与履带轨距之间的比值影响转弯的灵活性[7]。因此,履带地面力学对于履带行走机构的设计具有重要意义。履带在硬路面上行走转向主要克服履带与地面间的摩擦力,在软路面上行走转向除了摩擦力还要克服履带的侧向推土阻力。目前,对于履带行走转向的力学模型分析并不全面,只分析了硬路面工况下履带与地面间的摩擦力的求解[5],或只考虑了软路面工况下推土阻力的求解[8],并没有一个通用的数学模型。
本文旨在尝试建立一个通用的履带地面力学模型,并将此模型应用到所研制的履带式煤矿救援机器人的设计上,并根据设计的煤矿救援机器人验证理论结果。
1 物理模型的提出
对于在复杂路面上行走的履带机器人,在直行过程中,机器人驱动轮与履带之间相互作用力只需要克服履带与地面间的摩擦力,履带与地面之间并无相对运动。而在履带转弯过程中,履带必须与地面产生相对滑动,因此履带地面力学主要是针对机器人转弯过程提出的。将履带所能接触的地面分为硬质地面和软地面,对于在软地面行驶,履带受力情况相对复杂更能符合履带机器人的实际工况。履带在软路面转弯过程中,主要克服其与地面间的摩擦力与推土阻力。
对于履带机器人转弯,可以抽象为如图1所示的物理模型。

图1 履带理想转弯模型Fig.1 Track ideal turning model
图中转弯半径R0与角速度 ω0可由式(1)求解[9]:

式中:B为两条履带的中心距,va1、va2分别为两条履带的速度。但是在实际过程中,因为履带存在滑移与滑转[4,10-11],同时会发生侧向与横向偏移[12-13],所以转弯过程并不是如图1所示的理想情况,为了使模型更加接近实际,同时使推导的数学模型更加通用,对履带转弯物理模型进行修正。
为了便于计算,引入打滑速度δi(i=1,2,i=1代表内侧,i=2代表外侧)。由于滑转率的存在,真实速度并不等于理论速度,二者之间存在如下关系:

简化运算,这里令履带两侧打滑速度相同。均为δ,则

记履带接地面速度瞬心产生的纵向偏移为Di(i=1,2,i=1代表内侧,i=2 代表外侧)。这里令A1=A2=A,D1=D2=D。因此,可以得出履带实际转弯模型如图2所示。
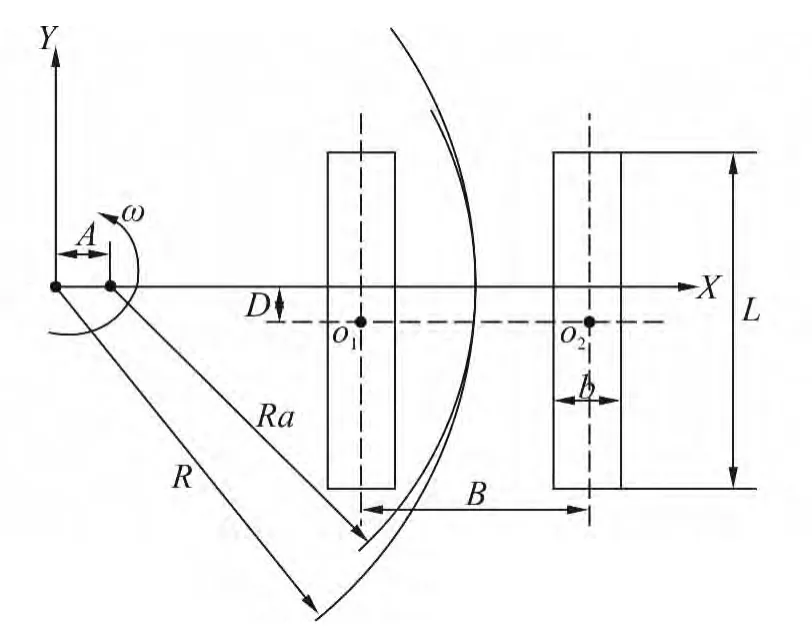
图2 履带实际转弯模型Fig.2 Track real turning model
2 数学模型的建立
根据创建的履带实际转弯物理模型,建立履带转弯数学模型。
2.1 履带与地面摩擦阻力的计算
以一条履带作为分析对象,将履带实际接地面速度瞬心为原点,建立如图3所示的坐标系,取履带接地面一微元dxdy,则有微量摩擦力dFi(其中i=1、2,分别代表内、外侧履带)作用,方向与该点绝对速度相反,有

式中:p(x,y)为接地比压函数。

图3 履带接地面受力图Fig.3 Force diagram of track by the ground
dFi在X轴和Y轴方向的分量为

由此可得地面对履带的转向阻力Moi(绕履带速度瞬心O)为

其中i=1,2。
当i=1时为内侧履带,此时的x、y的积分上下限分别为[R-B/2-0.5b,R-B/2+0.5b]、[-L/2-D,L/2-D]。
当i=2时为外侧履带,此时的x、y的积分上下限分别为[R+B/2-0.5b,R+B/2+0.5b]、[-L/2-D,L/2-D]。
所以,履带接地面与履带间摩擦引起的总的转向阻力为

2.2 履带侧面推土阻力计算
若忽略侧面刮起土堆的质量,履带侧面的受力如图4所示。其中,Q为下部土壤对楔形土的反作用力,Cθ=ZC/sin θ为单位面积上的内聚力,W为单位面积土壤重量,RB(θ)为单位长度推土阻力,φw为板壁摩擦角,θ为破坏面角度,φ为土壤内摩角。

图4 履带侧面受力图Fig.4 Force diagram of track by side
根据Bekker推荐的载荷沉陷量的关系可以推出式(8)[9]:

式中:z为沉陷量,kc、kφ是土壤内聚及摩擦变形模量,n是变形指数。
履带两侧任一单位长度上的推土阻力RB可从力的平衡式中得到

式中:γs为土壤容重。

由于MTi只是θ的函数,MTi的最小值对应着一定的θ值,在此θ值下,地面被破坏,故侧面推土阻力产生的转向阻力矩为
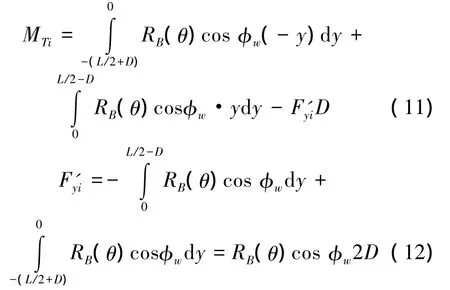
将式(12)代入式(11),得

所以履带侧面推土引起的总的转向阻力矩MT为

忽略履带内部摩擦阻力等因素,因此地面引起的总的转向阻力矩M为

2.3 履带地面力学数学模型
根据2.1与2.2节推导出的计算公式,可以得到通用的履带地面力学数学模型,如式(16)所示,履带在软路面上的受力为两部分力之和。

对于能够正常行驶的履带机器人,其履带地面力学还必须能够满足履带转向条件,即对于匀速转动,驱动力对旋转中心的距大于阻止转向的力[5]。针对本文中的模型,平行于Y方向摩擦力就是驱动力对回转中心的力矩:

平行X轴方向摩擦力就是阻止转向的力矩:

机器人能成功转向的必要条件是驱动力对旋转中心的距大于阻止转向的力:

3 算例分析
根据所推导出的履带地面力学模型,对正在研制的煤矿救援机器人履带行走机构进行设计。煤矿救援机器人主要用于煤矿发生事故后,机器人代替人对事故现场第一时间进行井下灾后环境探测[14],其工作环境为煤矿井下。为了使设计能够更好地贴近实际,这里采样了部分煤泥,依据土力学实验[15-16]测试出了计算所需的土壤力学参数,包括土壤内聚变形模量kc=0.805 kN/mn+1、摩擦变形模量kφ=21.36 kN/mn+2、变形指数n=0.3、土壤土壤内摩擦角φ=30.93°和粘聚力C=11 610 Pa。根据实际情况,所设计的机器人其履带接地长度L应当大于1 000 mm,履带中心距B应该大于700 mm才能满足要求。根据需要令B∈[700,800]mm,b∈[80,120]mm。
设计思路是在履带宽度b和履带中心距B的变化范围内,寻找转弯阻力矩M最小的组合。因此将式(16)作为目标函数,将式(19)作为约束条件,进行最优化求解,其中机器人质量M=300 kg,地面与履带间摩擦系数μ=0.55,va1=0.4 m/s,va2=-0.4 m/s 。
在使用所推导出的数学模型进行煤矿救援机器人设计优化的时候,发现现有的数学软件无法解决二重积分变上限的最优化求解问题,因此使用了数值分析方法结合C语言编程,运用遍历求解的思想来寻找所设计煤矿救援机器人的履带最优参数,最终得到计算结果如图5所示。
程序共求解出189组值,每组值对应一个B与b。根据计算的数据,所设计煤矿探测机器人在B=700 mm,b=120 mm时转向阻力矩最小,其值为314.08 N·m。
因为现阶段所设计的煤矿救援机器人还未取得煤矿安全标志许可,故无法在井下煤泥地面进行试验。因此选择与煤泥相近的地面,进行原地转向试验,可以测出在此状态下机器人的总电流为25 A。根据电机特性计算出扭矩约为293 N·m,与理论值相近。

图5 转向阻力矩图Fig.5 Steering resistance torque

图6 机器人原地转弯试验Fig.6 Experiment of turning about the center
4 结束语
本文主要推导出了履带式移动机器人地面力学的通用数学模型,为设计优化履带式移动机器人底盘提供了理论依据。通过寻找转弯阻力矩的最小值,可以得出履带的宽度、接地长度与两条履带的中心距的最佳值,与此同时还可以理论计算出所需要的最小驱动力矩,从而为原动机选型提供理论依据,通过此公式计算出的理论值与实际测试的结果相近。
[1]KWON H J,SHIM H,KIM D,et al.A development of a transformable caterpillar equipped mobile robot[C]//IEEE International Conference on Control,Automation and Systems.Seoul,Korea,2007:1062-1065.
[2]FRACZEK J,SUROWIEC M,WOJTYRA M,et al.Multibody modelling of a tracked robot's actuation system[J].Geoplanet Earth and Planetary Sciences,2013:75-93.
[3]赵文生.履带式行走机构设计分析[J].湖北农机化,2010(4):56-58.
[4]赵瑜,闫宏伟.履带式行走机构设计分析和研究[J].新技术新工艺,2010(5):50-53.ZHAO Yu,YAN Hongwei.Design analysis and research on tracked walking mechanism[J].New Technology& New Process,2010(5):50-53.
[5]刘国民,黄海东,张萃.履带底盘转向解析[J].中国工程机械学报,2010,8(3):309-313.LIU Guomin,HUANG Haidong,ZHANG Cui.Analysis on turning mode for crawler chasses[J].Chinese Journal of Construction Machinery,2010,8(3):309-313.
[6]MARSILI A,SERVADIO P.Compaction effects of rubber or metal-tracked tractor passes on agricultural soils[J].Soil&Tillage Research,1996,37(1):37-45.
[7]BODIN A.Development of a tracked vehicle to study the influence of vehicle parameters on tractive performance in soft terrain[J].Journal of Terramechanics,1999,36(3):167-181.
[8]孙海涛,王国强,王良,等.软路面履带转向阻力的研究[J].建筑机械,1995(9):23-26.SUN Haitao,WANG Guoqiang,WANG Liang,et al.Study of turning resisting moment of tracked vehicles on soft ground[J].Construction Machinery,1995(9):23-26.
[9]刘国民,黄海东.履带底盘转向轨迹的研究[J].水利电力机械,1998(5):18-21.LIU Guomin,HUANG Haidong.Study on turning track of caterpillar base plate[J].Water Conservancy & Electric Power Machinery,1998(5):18-21.
[10]WONG J Y.Development of high-mobility tracked vehicles for over snow operations[J].Journal of Terramechanics,2009,46(4):141-155.
[11]YAMAKAWA J,WATANABE K.A spatial motion analysis model of tracked vehicles with torsion bar type suspension[J].Journal of Terramechanics,2004,41(2/3):113-126.
[12]程军伟,高连华,王红岩,等.基于滑动及计履带宽的条件车辆转向负荷的计算[J].车辆与动力技术,2007(1):40-44.CHENG Junwei,GAO Lianhua,WANG Hongyan,et al.Calculation of tracked vehicle steering-load based on conditions of tracks’slip and track-width considered[J].Vehicle& Power Technology,2007(1):40-44.
[13]史力晨,王良曦,张兵志.履带车辆转向动力学仿真[J].兵工学报,2003,24(3):289-293.SHI Licheng,WANG Liangxi,ZHANG Bingzhi.Dynamic simulation of tracked vehicle steering performance[J].Acta Armamentarii,2003,24(3):289-293.
[14]王勇,朱华,王永胜,等.煤矿救灾机器人研究现状及需要重点解决的技术问题[J].煤矿机械,2007,28(4):107-109.WANG Yong,ZHU Hua,WANG Yongsheng,et al.Current status and technical problems in research of coal[J].Coal Mine Machinery,2007,28(4):107-109.
[15]孟为国,赵又群.田间土壤力学参数测定方法研究[J].农业开发研究,2009(1):8-10.MENG Weiguo,ZHAO Youqun.Research for method of testing soil mechanics parameters[J].Research in Agriculture Development,2009(1):8-10.
[16]王文隆,王修斌.地面力学中土壤参数的选定及测量方法和仪器[J].农业机械学报,1983(4):1-5.WANG Wenlong,WANG Xiubin.The study of soil parameter standard in the terramechanics and the instrument for parameter measuring[J].Transactions of the Chinese Society for Agricultural Machinery,1983(4):1-5.
