基于灰度化权值调整的水下彩色图像分割
2015-08-30张铭钧李煊王玉甲
张铭钧,李煊,王玉甲
(哈尔滨工程大学机电工程学院,黑龙江哈尔滨150001)
水下微光成像技术在近距离水下作业中,相比其他探测技术具有明显优势,研究基于水下微光成像技术的图像分割方法对提高自主式水下机器人的作业能力具有重要的研究意义和实用价值[1]。
由于水介质对光线的散折射及吸收效应、水中杂质及水下照明条件等因素影响,水下图像存在对比度低、信噪比低、颜色分布不均等问题。作者采用文献[2]方法进行水下图像分割时发现,该方法对噪声有较好的抑制能力,但由于目标与背景间灰度级较为相似,分割结果中易出现目标与背景粘连等问题;文献[3]方法以饱和度S作为主分析通道,对不同颜色分量进行序列分割,作者在实验中发现,S分量受光照强度与光线入射角度影响较严重,由于球体目标表面感光程度不均匀,分割结果中易出现目标分离不完整等问题。文献[4]提出一种新的模糊谱聚类分割方法,该方法定义模糊相似性测量矩阵,并将该矩阵应用于谱聚类方法中,得到最终分割结果,作者在实验中发现,该方法迭代确定相似性测量矩阵的耗时较长,难以满足本课题水下作业的实时性要求(一般水下作业要求视觉系统处理时间为100 ~ 500 ms[5-6],本课题要求水下视觉系统在200 ms内返回目标的定位信息)。本实验室前期研究了近海浅水环境中水下图像分割及目标提取方法[7],该方法以H通道为主,并融合 S和I通道信息完成图像分割,采用该方法在水下灯照环境实验发现,由于S通道受光照强度及分布情况影响较大,融合S和I通道信息得到的图像存在目标物与背景粘连,进而导致分割失败。
针对上述问题,作者综合考虑水下环境特点及本课题对视觉系统的时间要求,提出一种基于灰度化权值调整的水下彩色图像分割方法,不同于传统阈值分割方法中,灰度化权值固定且重点研究如何自适应选择阈值的思路,本文方法重点研究如何根据RGB彩色模型中水下图像颜色信息的不同表达,来调整灰度化时三通道的权值,以获得对比度较高的灰度图像。本文方法在美国国家电视标准委员会(National Television Standards Committee,NTSC)提出的灰度化方法[8](简称“NTSC法”)的基础上进行灰度化权值调整的研究,提高差异性较大通道比重,同时降低差异性较小通道比重,以得到合适的权值完成图像灰度化,并对灰度化后的图像进行阈值分割[9],得到最终的分割结果。
为提高序列图像处理的实时性,以更好地配合机器人及机械手完成水下作业,在本文分割方法的基础上,设计了一种两步序列图像处理方式,针对光照等水下环境因素变化的渐变性特点,将图像序列分段,每段中分别采用灰度化权值调整方法和固定权值的方法进行灰度化,并完成阈值分割。
通过4组水下对比实验以及耗时实验,对本文所提方法的有效性进行实验验证。
1 基于灰度化权值调整的水下彩色图像分割方法
针对传统自适应阈值法在水下图像分割过程中,易存在目标与背景粘连等问题,本文提出一种基于灰度化权值调整的水下彩色图像分割方法。不同于传统阈值分割法中图像灰度化权值固定且研究如何确定图像阈值大小与个数的思路,本文以NTSC法为基础,研究如何调整图像灰度化时的三通道权值,即灰度化权值调整方法,流程如图1,利用统计的灰度信息来确定不同通道中目标与背景间灰度级的差异性,通过提高差异性较大通道的比重,同时,减小差异性较小通道的比重,得到对比度较高的灰度图像,对灰度化后的图像进行阈值分割,得到最终分割结果。
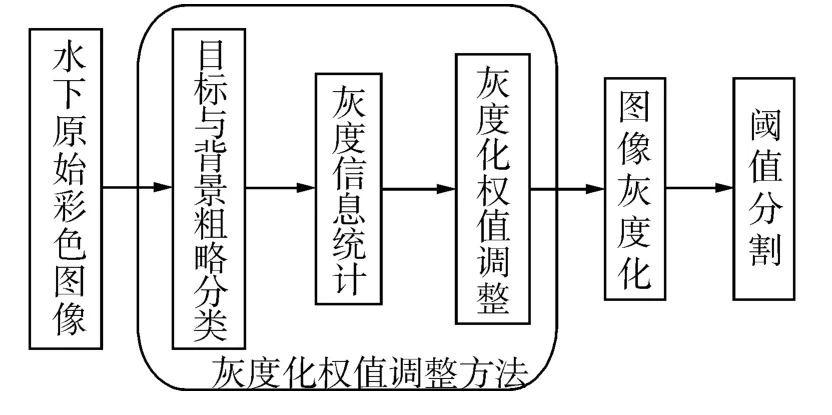
图1 基于灰度化权值调整的水下彩色图像分割方法Fig.1 Underwater color image segmentation method based on weight adjustment of color to gray processing
为提高序列图像处理的实时性,作者设计了一种两步序列图像处理方式,针对光照等水下环境因素变化的渐变性特点,将图像序列分段并对每段进行两步处理,第1步采用灰度化权值调整方法对前N幅图像进行处理,选出一组最适权值,并直接用于第2步图像灰度化,进而完成图像阈值分割。
1.1 灰度化权值调整方法
图像灰度化是阈值分割的第一步。NTSC法是一种基本的灰度化方法,其将CIE空间中的Y通道(即亮度信息)直接作为灰度值输出,可表达为:

式中:r、g、b依次为 0.299、0.587 和 0.114[8]。
作者在RGB彩色模型中采用NTSC法进行水下彩色图像分析时发现,NTSC法以保留图像各种细节信息为主,其灰度化结果中包含气泡、杂质以及背景干扰等与目标无关的信息;另外,由于水下图像存在对比度低、信噪比低、颜色分布不均等问题,导致灰度图像中目标与背景的灰度级较相似,采用这类灰度图像进行阈值分割时,分割结果中易出现目标与背景粘连,目标分离不完整等现象。作者对水下图像的RGB彩色模型进一步分析发现,由于目标物与背景的颜色不同,根据三基色原理[10]可知,目标颜色与背景颜色的RGB合成比例不同,对应到不同通道,其灰度级的差异程度不同。作者对上述分析进行实验验证,结果表明RGB三通道中目标与背景间灰度级的差异程度不同,且至少存在一个通道中目标与背景间灰度级存在明显差异。
根据上述分析与实验结果,不同于NTSC法以保留图像细节信息为主,根据人类视觉系统对颜色的感知能力而确定r、g、b取值[11]的方式。本文灰度化权值调整方法以突出目标信息为主,重点研究如何根据水下图像特点来调整权值,以获得对比度较高的灰度图像。本文方法统计RGB三通道信息,来确定不同通道内目标与背景间灰度级差异性的大小,利用该差异性进行灰度化权值调整,提高差异性较大通道的比重,同时减小差异性较小通道的比重,以获得对比度较高的灰度图像。
基于上述分析,本文方法具体实现时依次按以下3步进行:1)目标与背景粗略分类。旨在划分出目标的大致范围;2)灰度信息统计。旨在得到图像RGB三通道内目标与背景间灰度级的差异性;3)灰度化权值调整。根据RGB三通道间的灰度差异性的不同,来调整灰度化权值。具体实现过程如下。
1.1.1 目标与背景粗略分类
在RGB彩色模型中对水下图像进行粗略分类时发现,由于RGB模型中三通道信息相关性较高,导致难以直接确定哪个通道中目标与背景间灰度级差异性较大,进行分类时,受差异性较小的通道影响,易导致分类结果与真实情况偏差较大。
针对上述问题,本文在三通道相互独立的HSI彩色模型中进行目标与背景粗略分类方法的研究。作者分析一幅水下灯照环境中采集的图像发现,H通道用于区分颜色信息,目标物与背景的颜色不同,因而H通道灰度图像中目标与背景的灰度级差异明显,由于球体表面受光不均匀,图像中目标区域灰度不均匀,单独基于H通道分类时易导致分离不完整。S通道受光照影响较大,不同光照条件成像效果不同,基于S通道的分类难以适用于水下不同环境;I通道与光照强度及分布情况相关,在I通道灰度图像中,目标表面反光较强灰度值较高,目标周边水域因光线直接穿过,其灰度值较低,背景中其他干扰物反光程度不同,呈现出不同灰度值,单独基于I通道分类时结果中易出现大量背景干扰。
基于上述分析,本文融合H和I信息进行目标与背景的粗略分类,其具体实现方法如下:
采用阈值法对H通道和I通道的对应灰度图像进行处理,然后对2个处理结果进行集合并运算,得到粗略分类后的图像目标区域O(iO,jO):

式中:iO、jO表示像素坐标位置;H(iH,jH)和Ⅰ(iI,jI)分别表示H和I通道中目标区域内像素的坐标位置,iH和iI表示横坐标,jH和jI表示纵坐标。
除O(iO,jO)中的像素,图像中其余像素属于背景区域B(iB,jB)。至此完成目标与背景的粗略分类。
1.1.2 灰度信息统计
将1.1.1节中得到的目标与背景粗略分类结果{O(iO,jO),B(iB,jB)}对应到图像的 RGB 彩色模型中,得到3组分类结果分别对应三通道。在每个通道中完成两步信息统计[12]:1)目标区域与背景区域内的像素灰度均值;2)目标区域与背景区域间灰度均值差DR,DG和DB。至此完成灰度信息统计。
1.1.3 灰度化权值调整
作者采用NTSC法进行水下图像灰度化,得到的灰度图像较模糊,且包含大量气泡、杂质等干扰;另外,在不同光照条件下水下图像中显示的颜色信息不同,由于NTSC法中灰度化权值固定,导致在有些环境中出现分割失败等问题。
针对上述问题,不同于NTSC法中权值固定的形式[6],本文根据目标与背景颜色信息在图像RGB三通道中的表达的差异,来调整灰度化权值。本文利用1.1.2节中得到的灰度均值差,来判断三通道间具有的差异性或相似性。当某个通道的均值差远大于其余2个通道时,表示该通道中目标与背景存在较明显差异,直接利用该通道信息作为灰度化结果,采用阈值分割即可得到较满意的分割结果,本文称该通道为主导通道;当3个通道中不存在主导通道时,判断3个通道间的相似性,若3个通道的均值差较接近,则采用NTSC法进行灰度化;若2个通道的均值差较接近,则按照NTSC法中这2个通道对应权值的比例,重新分配权值,完成图像灰度化。为避免图像变形,调整后三通道对应权值相加为1。作者对大量图像进行分析,确定阈值Tbig与Tsmall,用于判断三通道间的关系,其中Tbig>Tsmall。
基于上述思路,本文以DR>DG>DB的情况为例,介绍算法实现的过程。定义下式:

若存在D1+D2+D3<Tsmall,说明3个通道之间具有相似性,则采用NTSC法进行图像灰度化;若不存在D1+D2+D3<Tsmall,判断D1>D2是否成立,若成立,说明G通道和B通道间具有相似性,由于R通道的灰度均值差最大,表明R通道为主导通道,则RGB3个通道的取值依次为1、0、0。
若D1>D2不成立,判断D1>Tbig是否成立,若成立,表明R通道为主导通道,则RGB三通道的权值依次为 1、0、0。
若上述3种情况依次均未满足,说明R通道和G通道具有相似性,采用NTSC法中RG通道的对应权值(即式(1)中r、g的值),加权平均后进行归一化处理,即可得到三通道权值rRG、gRG和bRG:

同理,适用于RB通道相似和GB通道相似的情况,其调整得到的图像灰度化权值分别为
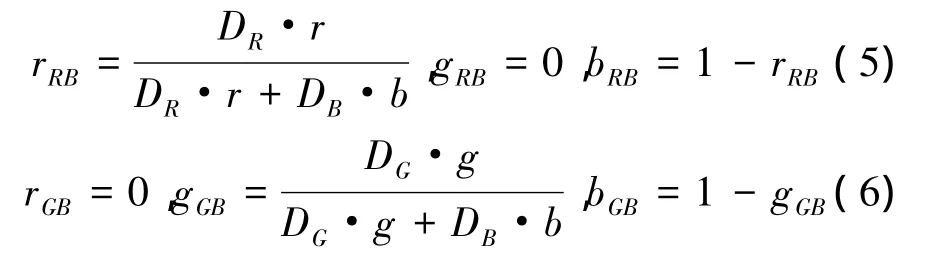
将式(1)中r、g、b的取值分别代入式(4)、(5)、(6)中,即可得到这3种情况下调整后的权值。
水下不同环境的图像特征不同,调整后的灰度化权值也不同。采用调整后的权值完成图像灰度化,并进行阈值分割[9]得到最终的分割结果。
1.2 两步序列图像处理方式
将本文分割方法用于机器人水下作业时发现,短时间间隔内相邻图像特征相似,调整后的灰度化权值相近。若对每幅图像均采用本文权值调整方法进行处理,会增加不必要的算法耗时。
基于上述分析,为提高序列图像处理的实时性,以更好地配合机器人完成水下作业,在本文分割方法的基础上,作者设计了一种两步序列图像处理方式,将整个图像序列分段并在每段中进行两步处理。第1步仅采用本文权值调整方法对前N幅图像进行处理,选出一组最适权值;第2)步直接利用第一步的最适权值进行图像灰度化、并进行阈值分割得到每幅图像的分割结果。具体实现步骤如下:
1)当目标物稳定出现在视场中后,开启图像分割任务,采用本文灰度化权值调整方法对前N幅图像进行处理,得到N组权值,将N个组合中出现次数最多的一组作为最适灰度化权值r、g、b。
2)将第1)步得到的最适权值r、g、b直接用于后续图像灰度化,并对灰度化后的图像进行阈值分割,得到最终的分割结果。
不断循环上述两步的处理方式,以完成水下作业过程中图像序列的分割处理。上述两步处理过程中,减少了大部分图像进行权值调整的耗时,因而提高了序列图像处理的实时性。
2 实验验证
为验证本文分割方法的有效性,进行4组水下对比实验,其中,水下不同环境对比实验分3组:1)水下灯照环境对比实验,2)自然光照环境对比实验,3)干扰环境对比实验。第4组为与其他图像分割方法对比实验,该实验用于进一步验证本文分割方法的有效性。另外,为验证本文两步序列图像处理方式的有效性,进行序列图像处理耗时实验。
为更全面地分析上述对比实验结果,作者采用两类评价指标从灰度化结果和分割结果两方面进行分析:1)采用基于HVS的图像对比度无参考质量评价模型[13]对比分析灰度化结果的优劣;2)采用3个较常用的分割评价指标对比分析分割结果的优劣,分别为GC(区域间对比度)、UM(区域内均匀度)和ME(误分类误差)[14],其取值范围均为[0,1],且GC和UM的值越接近1说明分割效果越好,ME的值越接近0说明分割效果越好。
实验在4×3×1 m3的水箱中进行,摄像机和水下灯固定安装在支架上。球体目标物悬浮于水中,距水面约0.5 m。实验是在 Intel Core T5750 2 GHz、2 G内存的PC机上进行的,编程环境为VC++6.0,图像大小为 352×288。Tbig、Tsmall的取值由实验确定,本文取为60和20。
2.1 水下不同环境对比实验
水下不同环境对比实验验证本文分割方法有效性的同时,也用于验证本文分割方法在水下不同环境中的适应性。对比实验在3种不同环境中进行,分别为:1)水下灯照环境;2)自然光照环境;3)干扰环境,干扰环境分为有流环境和人为干扰环境,有流环境中作者通过推进器人工造流,流速为0.5 kn(0.25 m/s),人为干扰环境中通过人手在球体目标物附近搅动水流,使得图像背景中出现大量气泡。
3种环境的对比实验过程一致。实验中,对球体目标图像分别采用NTSC法和本文方法进行图像灰度化,然后进行阈值分割[9]得到最终分割结果。对比实验结果如图2所示,其中,图(a)-(e)中的①与图(a)-(e)中的②分别表示水下灯照环境对比实验中黄球和红球图像分割结果,图(a)-(e)中的③表示自然光照环境对比实验中红球图像分割结果,图(a)-(e)中的④与图(a)-(e)中的⑤表示干扰环境对比实验中红球图像分割结果,分别对应有流环境和人为干扰环境。另外,自然光照环境和干扰环境中黄球与红球实验结果相似,本文以红球为例分析这两种环境中的对比实验结果。
为更全面地分析和验证本文方法的有效性,采用分割评价指标[14]分别对图2(c)和(e)进行评价,用于对比分割结果;采用对比度评价模型[13]分别对图2(b)和(d)进行评价,用于对比灰度化结果;并统计了算法耗时,上述数据列于表1。
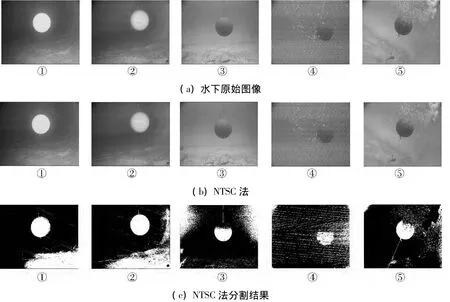
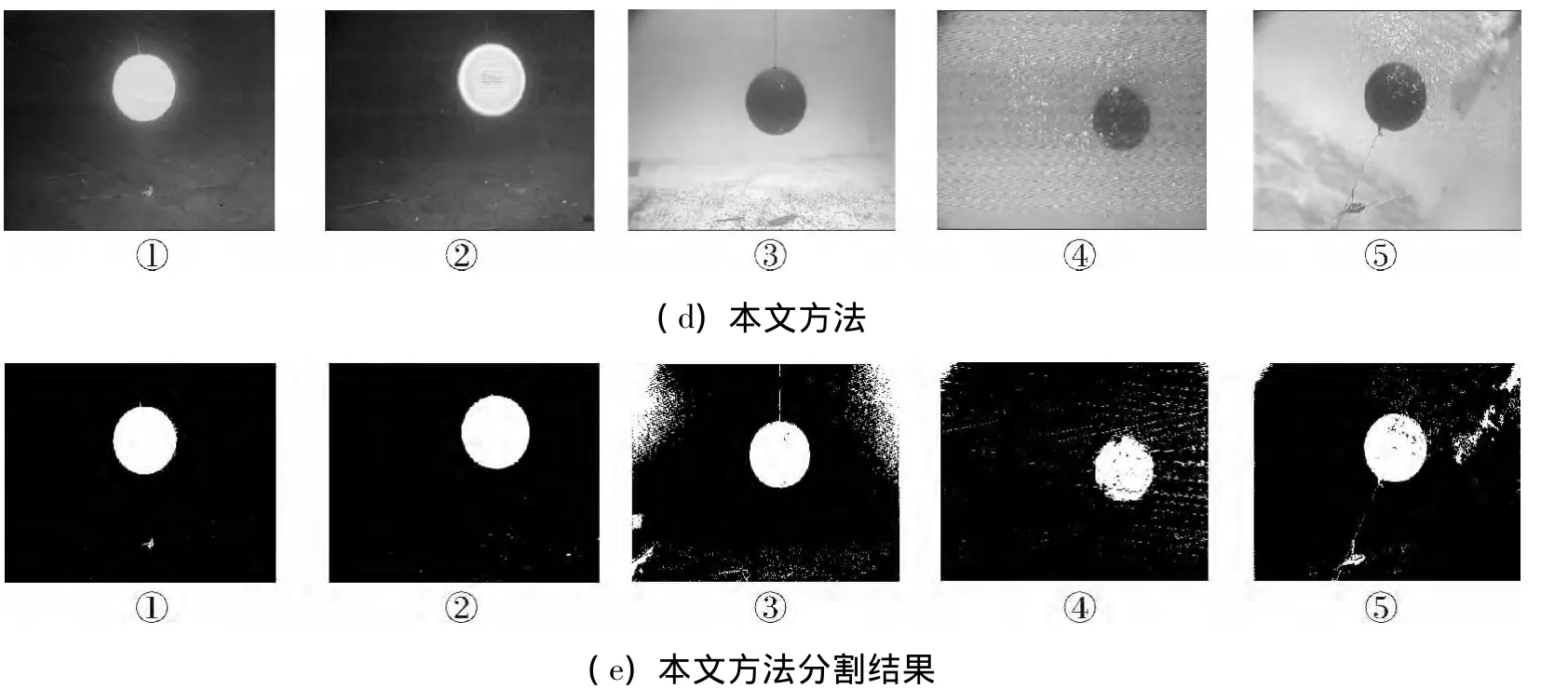
图2 水下不同环境对比实验结果Fig.2 Comparison of experimental results in different underwater environments

表1 水下不同环境对比实验数据统计Table 1 Comparison of experimental datas in different underwater environments
分析水下灯照环境对比实验结果,从图2(a)-(e)中的①与②可以看出,水下原始图像中存在大量背景干扰物,红球目标颜色分布不均匀。NTSC法得到的灰度图像中目标区域与部分背景干扰区域的灰度级较相似,分割结果中存在大量干扰物,目标边缘不平滑且与背景存在一定程度粘连;本文方法得到的灰度图像中目标区域与背景区域间灰度级存在明显差异,且背景干扰物较少,分割结果中干扰物较少,目标边缘平滑且得到较完整的目标物。
分析自然光照环境对比实验结果,从图2(a)-(e)的③可以看出,由于自然光从上方入射,球体上半部光照充足偏红色,下半部缺乏光照呈暗色调,目标区域颜色不均匀。受上述颜色不均匀现象的影响,NTSC法得到的灰度图像中目标区域自上而下呈现不同的灰度级,分割结果中仅提取出目标的下半部;本文方法得到的灰度图像中目标区域灰度级较均匀,因此分割出较完整的目标物且边缘较平滑。
分析干扰环境对比实验结果,从图2(a)-(e)的④与⑤可以看出,由于水流和人手的影响,原始图像中目标附近存在大量气泡和人手干扰,且图像受噪声污染较严重。有流环境中,NTSC法得到的灰度图像中存在大量气泡,导致分割结果中大量气泡被检测出来,且目标与背景粘连;本文方法得到的灰度图像中目标与背景灰度级存在较明显差异,分割结果中大部分气泡和噪声被剔除,并分割出目标。人为干扰环境中,NTSC法得到的灰度图像中目标区域被大量气泡覆盖,导致分割结果中目标分离不完整;本文方法得到的灰度图像中气泡、人手与目标的灰度级存在明显差异,分割结果中大部分干扰被剔除,并得到较完整的目标物。
对表1中的数据进行对比分析:
1)灰度化结果分析。较NTSC法,本文方法得到的HC的值有不同程度提高,5组实验分别提高了6.45%、6.73%、25.15%、21.04%、19.76%。表明在水下灯照环境,自然光照环境和干扰环境中,本文方法的灰度化效果优于NTSC法。
2)分割结果分析。较NTSC法,本文方法得到的实验数据,GC和UM的值更接近于理想值1,ME的值更接近于理想值0。上述数据表明在水下灯照环境、自然光照环境以及干扰环境中本文方法的分割效果优于NTSC法。
3)耗时分析。本文方法的平均耗时为94.4 ms,较 NTSC 法的平均耗时 15.6 ms,增加了 78.8 ms。虽增加了耗时,但能够满足本课题水下作业的时间要求。另外,为进一步降低本文分割方法的耗时,设计了两步序列图像处理方式,其效果通过2.3节序列图像处理耗时实验来验证。
综合上述对比实验结果,相较于NTSC法,本文方法能够增强灰度图像对比度,有效地减轻气泡、水中杂质等干扰,并分离出较完整的目标物。在水下灯照环境、自然光照环境和干扰环境的对比实验中本文方法均得到较满意的分割结果,表明本文方法能够较普遍地应用于水下环境图像分割,且能够满足本课题水下作业的时间要求。
2.2 与其他图像分割方法对比实验
为进一步验证本文分割方法的有效性,本文进行了与其他图像分割方法的对比实验,实验分别在水下灯照环境和人为干扰环境中进行。实验中,采用文献[3]中基于自定义颜色空间的分割方法、文献[4]中模糊谱聚类的分割方法和本文方法分别对采集得到的水下图像进行处理,结果如图3、4所示。图3(a)和图4(a)分别为图2(a)②和图2(a)⑤的图像,图3(b)~(d)表示分别采用上述3种方法处理图3(a)得到的分割结果,图4(b)~(d)表示分别采用上述3种方法处理图4(a)得到的分割结果。
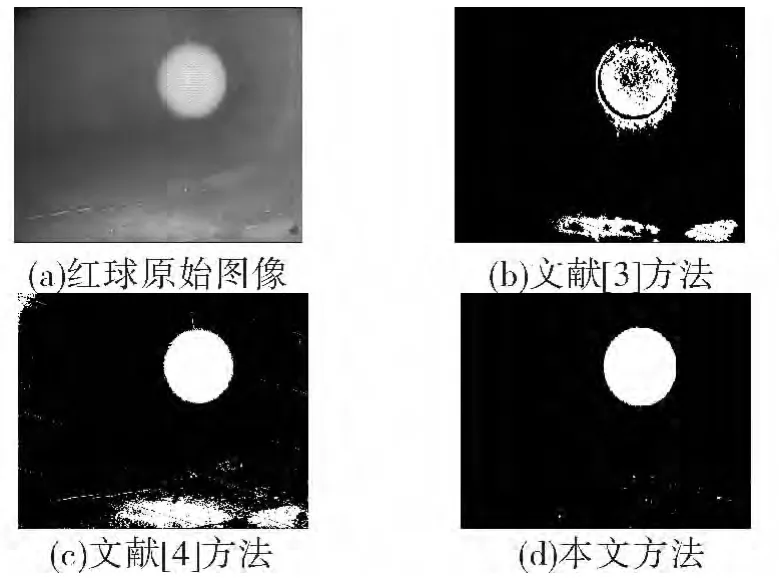
图3 水下灯照环境中红球分割结果Fig.3 Image segmentation results about red target in underwater environment with illumination condition

图4 人为干扰环境中红球分割结果Fig.4 Image segmentation results about red target in an interference environment
对比分析图3(b)~(d)可以看出,文献[3]方法以S通道信息为主,由于球体表面受光不均匀,边缘处出现环形分隔带,分割结果中目标提取不完整。文献[4]方法分离出较完整目标物,但由于目标区域灰度级与水箱底部干扰灰度级较相似,分割结果中存在干扰物。本文方法得到的分割结果中大部分干扰被剔除,且分离出较完整目标物。
对比分析图4(b)~(d)可以看出,文献[3]、[4]方法和本文方法均能分割出目标物,本文方法的目标边缘更平滑,目标区域内孔洞更少。
为更全面地对比3种方法的分割效果,采用分割评价指标分别对图3(b)~(d)和图4(b)~(d)进行评价,并统计算法耗时,上述数据列于表2中。
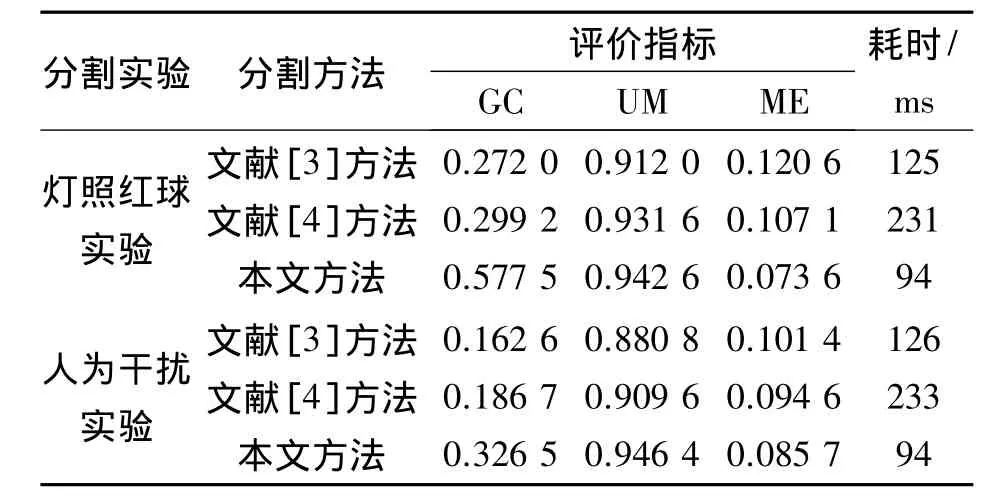
表2 水下不同环境对比实验数据统计Table 2 Comparison of experimental data in different underwater environments
对比分析表2中的数据可知,较文献[3]和文献[4]方法,本文方法的分割结果中,GC和UM的值更接近于理想值1,ME的值更接近于理想值0。同时,本文方法的平均耗时最短,较文献[3]方法降低了 25.10%;较文献[4]方法降低了 59.48%。上述数据表明在灯照环境与人为干扰环境中本文方法的分割效果和实时性均优于文献[3]和文献[4]方法。
2.3 序列图像处理耗时实验
为验证本文两步序列图像处理方式的有效性,作者在水下灯照环境中采集900幅红球目标图像,采集过程中保持摄像机位置不变,在其视场范围内人为晃动目标物,以模拟机器人水下作业的情况。
为便于对比,首先不采用本文两步方式处理900幅序列图像,对每幅图像依次进行灰度化权值调整、图像灰度化和阈值分割处理,得到最终分割结果。这一过程共耗时85 140 ms。然后采用本文两步方式处理900幅序列图像,实验具体步骤如下:
1)采用本文权值调整方法对序列中前10幅图像进行处理,得到10组权值,从中选择出现次数最多的一组作为最适权值。这一步共耗时785 ms。
2)采用1)中的最适权值对后续140幅图像进行灰度化处理,并进行阈值分割得到最终分割结果。这一步共耗时2 156 ms。
不断循环上述两步方式处理其余的750幅图像,完成整个图像序列的分割处理。
作者对上述实验数据进行统计发现,采用本文两步方式处理的900幅图像共耗时17 646 ms,相对于不采用该方式的序列图像处理耗时,其降低了79.27%,该结果表明本文两步序列图像处理方式提高了水下作业过程中序列图像处理的实时性。
3 结束语
本文针对自适应阈值法在水下图像分割过程中存在目标与背景粘连等问题,提出一种基于灰度化权值调整的水下彩色图像分割方法,水下灯照环境、自然光照环境、干扰环境对比实验以及与其他图像分割方法对比实验结果表明,较NTSC法,本文方法能够有效减轻气泡、水中杂质等干扰,并分离出较完整的目标物;较基于自定义颜色空间与模糊谱聚类的分割方法,本文方法的分割结果中目标边缘更平滑,分割更完整。评价指标中,本文方法的GC、UM、ME和HC的取值均优于上述方法。同时,较基于自定义颜色空间与模糊谱聚类的分割方法,本文方法的平均耗时最低,算法实时性优于上述两种方法。为提高序列图像处理的实时性,作者设计了一种两步序列图像处理方式,序列图像处理耗时实验结果表明,相对于不采用两步方式的序列图像处理耗时,本文两步方式降低了79.27%,提高了水下作业过程中序列图像处理的实时性。
[1]徐玉如,李彭超.水下机器人发展趋势[J].自然杂志,2011,33(3):125-132.XU Yuru,LI Pengchao.Developing tendency of unmanned underwater vehicles[J].Chinese Journal of Nature,2011,33(3):125-132.
[2]LI Z Y,ZHANG D,XU Y,et al.Modified local entropybased transition region extraction and thresholding[J].Applied Soft Computing,2011,11:5630-5638.
[3]曹宇,赵杰,闫继宏.基于自定义颜色空间的快速图像分割方法[J].计算机科学,2009,36(2):265-267.CAO Yu,ZHAO Jie,YAN Jihong.Image segmentation method based on custom color space model[J].Computer Science,2009,36(2):265-267.
[4]LIU Hanqiang,ZHAO Feng,JIAO Licheng.Fuzzy spectral clustering with robust spatial information for image segmentation[J].Applied Soft Computing,2012,12:3636-3647.
[5]GIACOMO M,SONG K,CHOI,J Y.Underwater autonomous manipulation for intervention missions AUVs[J].O-cean Engineering,2009,31(1):15-23.
[6]曾文静,徐玉如,万磊,等.自主式水下机器人的光视觉管道探测跟踪系统[J].上海交通大学学报,2012,46(2):178-183.ZENG Wenjing,XU Yuru,WAN Lei,et al.Robotics vision-based system for autonomous underwater vehicle for an underwater pipeline tracker[J].Journal of Shanhai Jiaotong University,2012,46(2):178-183.
[7]张铭钧,万媛媛,李煊.水中光视觉图像分割及目标提取方法[J].哈尔滨工程大学学报,2013,34(12):1580-1586.ZHANG Mingjun,WAN Yuanyuan,LI Xuan.Image segmentation and target extraction based on underwater optical vision[J].Journal of Harbin Engineering University,2013,34(12):1580-1586.
[8]章毓晋.图像工程(上册)[M].3版.北京:清华大学出版社,2012:304-305.ZHANG Yujin.Image engineering(Ⅰ)[M].3rd Ed.Beijing:Tsinghua University Press,2012:304-305.
[9]RANJANI J J,THIRUVENGADAM S J.Fast threshold selection algorithm for segmentation of synthetic aperture radar image[J].Radar,Sonar& Navigation,IET,2012,6(8):788-795.
[10]陈林飞.基于分数变换光学的图像编码和信息处理技术研究[D].杭州:浙江大学,2008:98-100.CHEN Linfei.Research on image encryption and information processing techniques based on fractional transform optics[D].Hangzhou:Zhejiang University,2008:98-100.
[11]XIA Hua.Human computer interactions for converting color image to gray[J].Neurocomputing,2012,85(15):1-5.
[12]HEMALATA V B,SUBHASIS C.Laplacian based non-local means denoising of MR images with Rician noise[J].Magnetic Resonance Imaging,2013,31(9):1599-1610.
[13]田媛.灰度图像无参考质量评价方法研究[D].长春:中国科学院长春光学精密机械与物理研究所,2010:39-41.TIAN Yuan.Study on no-reference quality assessment method for gray image[D].Changchun:Changchun Institute of Optics,Fine Mechanics and Physics,Chinese A-cademy of Sciences,2010:39-41.
[14]刘春燕.图像分割评价方法研究[D].西安:西安电子科技大学,2011:29-32.LIU Chunyan.Survey on evaluation methods of image segmentation algorithms[D].Xi'an:Xidian University,2011:29-32.