跨越式高压输电线路巡线机器人动力学研究
2015-08-26吴功平
王 婷, 吴功平
(武汉大学 湖北 武汉 430072)
巡线机器人主要用于对输电线路的故障巡检, 以架空高压输电线路地线为行驶路径,通过机器人所搭载的高清摄像机及手眼摄像机等设备代替人对线路、 杆塔及金具实施检查。 针对高压输电线路的结构特征,本实验室设计了一种双臂滚轮跨越式高压输电线路巡线机器人,能够跨越地线上诸如防震锤、悬垂线夹一类的障碍物,自主完成在线巡检任务。
机器人的在线自主运行主要依靠机器人的实时控制系统, 通过实时控制给定机器人各关节运动相应的力矩或力,从而驱动各关节按照给定的曲线运动, 以完成在线巡检任务。 为了实时控制的需要,利用动力学模型,进行动力学逆问题的求解具有十分重要的意义。 本文采用D-H 法[1]构建跨越式巡线机器人空间坐标,用Lagrange 方法[2-3]建立机械臂动力学模型, 推导了机器人多刚体动力学方程, 在此基础上用ADAMS 对一种较复杂工况进行了机械臂各关节动力学仿真,通过给定各关节的位移、速度曲线,通过仿真确定各关节的有效驱动力或驱动力矩,从而为实时控制提供理论依据。
1 巡线机器人的结构分析
架空输电线路主要由输电导线及其金具 (包括防震锤、压接管、悬垂线夹、耐张线夹等)等组成,根据220 kV 及以上线路地线及其横担塔头结构,机器人的行驶路径主要由直线有障碍段、直线无障碍段和变向行走段3 种不同的路径段组成,如图1 所示。

图1 机器人行驶路径分类Fig. 1 The classification of robot moving path
根据线路的结构,以及对作业任务的分解、巡线机器人设计成双机械臂反对称结构,通过双臂悬挂在地线上,两个机械臂的端部带有滚轮,可使巡线机器人整机沿直线导轨移动;如图2 所示,双臂各有一个伸缩关节、一个俯仰关节、一个回转关节,双臂共用一个错臂移动关节;每个臂的末端各有一个行走关节(行走轮)、一个夹紧关节(夹爪)、一个压紧关节(压紧轮),为了增强机构的自适应能力,压紧轮铰接在压紧关节上,能够绕着压紧关节旋转,在压线过程中,自动调节以压紧导线。
2 巡线机器人动力学模型
2.1 Lagrange 方法的动力学建模

图2 巡线机器人机构示意图Fig. 2 Structure diagram of line-inspection robot
机器人动力学建模的方法有很多, 常用的方法有牛顿-欧 拉(Newton-Euler)方 法、拉 格 朗 日(Lagrange)方 法、高 斯(Gauss)方法、凯恩(Kane)方法、旋量对偶数方法等[1-3]。 其中拉格朗日方法是一种基于能量的动力学方法, 不需要求约束反作用力,可避免方程中出现不必要的内力项,推导相对比较简单。 本文通过该方法来推导巡线机器人系统的动力学模型。
用Lagrange 方法建立系统的动力学方程,首先构建拉格朗日函数,令系统总动能为Ek,系统总势能为Ep,则拉格朗日函数为:

由于势能Ep不含q˙i,则系统的动力学方程为:

式中:qi表示关节i 处的广义坐标; q˙i表示关节i 处的广义速度;τi表示关节i 处的广义力。
用D-H 坐标表示机器人的动能与势能,经推导简化后的拉格朗日方程可写成如下的形式:

式中:Ii为伪惯量矩阵;n 为机器人的杆件数;Trace 为方阵的秩;Dii为关节i 的有效惯量;Dij(i≠j)为关节j 对关节i 的耦合惯量;Dijj为关节j 的速度在关节i 处产生的向心力项系数;Dijk为关节j 和关节k 在关节i 处产生的哥氏力项系数;Gi为关节i 处的重力项系数。
2.2 巡线机器人动力学方程的推导
本文所研究的机器人共有7 个关节, 包括3 个移动关节和4 个转动关节。其中关节0 是基坐标,关节2、4、1、5 是转动关节,关节3、6 是移动关节(另一臂上与6 相对应的也是移动关节)。关节1、5 的轴线水平,分别与关节3 的轴线垂直,关节2、4 的轴线垂直,同样与关节3 的轴线垂直。 机器人与障碍物精定位后, 机器人夹爪及一个移动关节分别采取夹紧和压紧的方式将机器人与地线固连。 由此机器人还余下6 个活动关节, 将这6 个活动关节用D-H 法建立连杆坐标系如图3 所示。 在该坐标系中,将{0}基坐标系视作抽象的零刚体,并认为该机器人系统以抽象的O1({0}基坐标系的原点)与零刚体相联 系[4-7]。

图3 机械臂连杆坐标系Fig. 3 Coordinate system of mechanical armlinkage
每一个连杆及相邻杆间的关系用4 个参数表示: 相邻两连杆距离di,连杆长度为ai,连杆扭角为αi,两连杆夹角为θi[3]。相应的连杆参数列于表1 机械臂连杆参数中。
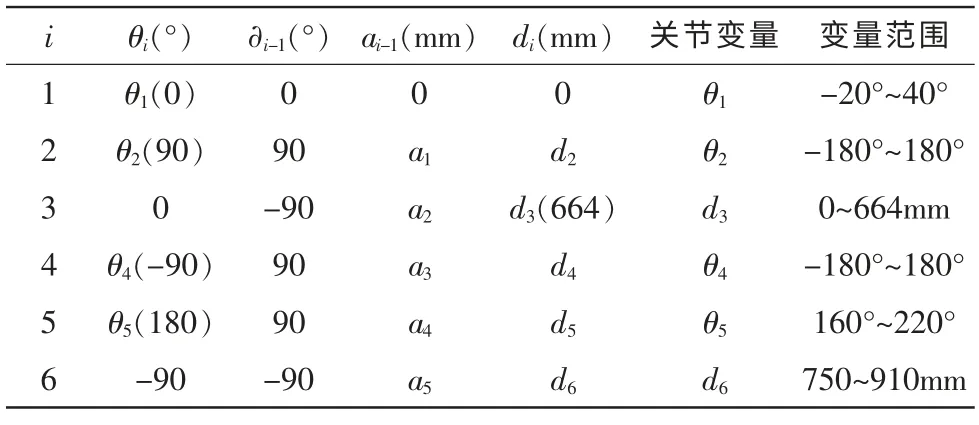
表1 机械臂连杆参数Tab. 1 Parameter of mechanical armlinkage
连杆变换公式为(其中cθ 代表cosθ,sθ 代表sinθ):

利用公式(8)及表1 所列的连杆参数可以算出各个连杆变换矩阵,将各个连杆变换矩阵相乘,即得到机器人的“越障臂变换矩阵,
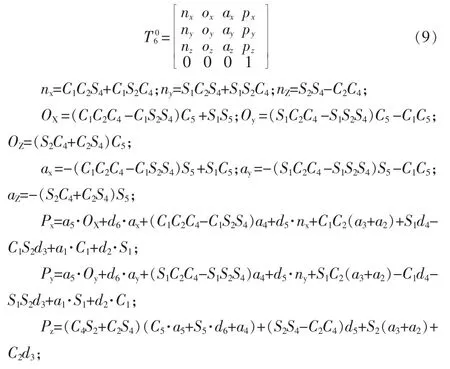
方程式(9)表示机器人的末端连杆坐标系{6}相对于基坐标系{0}的位姿。 为校核所得结果准确性,计算当θ0=0°,θ2=90°,d3=664,θ4=90°,θ5=90°,d6=750 时,手臂变换矩阵的值,利用MATLAB 计算结果为:

与图3 所示的情况完全相符。
由式(7)可得各连杆的伪惯量矩阵,将式(10)和伪惯量矩阵代入式(4)、(5)、(6),得Dii,Dijj,Dij,Dijk,将Dii,Dijj,Dij,Dijk代入式(3),即可得到巡线机器人的完整动力学方程。
3 机械臂动力学数值仿真及动态响应计算
3.1 机械臂动力学数值仿真
机械人的爬行工况有多种,其中有无障直线线段的滚动/压紧轮加压滚动爬坡、无障碍大坡度直线段的攀爬、错臂跨越双悬垂线夹、越过耐张杆塔等多种工况,本文选取工况错臂跨越双悬垂线夹,其运动规划图4 所示。 当机器人检测到前进方向上有悬垂线夹时, 会在距离悬垂线夹一定距离的地方停止,并且偶臂夹紧,奇臂伸长并转开使行走轮脱离导线如图(a)所示;移动机构运动使两臂交错,通过俯仰机构摆开奇臂如图(b)所示;奇臂缩短到一定距离找线落线如图(c)所示;偶臂俯仰机构摆开并伸长,机器人向前移动,使奇臂有摆回空间后,奇臂摆回夹紧如图(d)所示;偶臂伸长后摆回,回转错臂,回转找线落线,完成跨越双悬垂线夹,如图(e)、(f)所示。

图4 机器人跨越双悬垂线夹图Fig. 4 Diagram of crossing double hanging clip
其中,奇臂为图3 中{0}基坐标系所在臂,偶臂为{6}坐标系所在臂。 由于两个臂为反对称布局,故只需研究一个臂的力或力矩随时间的变化情况。 通过ADAMS 仿真平台对机械臂各关节进行动力学仿真,在仿真以前,已经根据操作臂的运动学方程确定机器人越障各个关节所需的位移或速度,通过对机械臂各关节加载位移、速度曲线,如图5 所示,机械臂各关节的运动规律均通过STEP 函数获得, 在仿真过程中没有考虑摩擦力。

图5 各关节位移、角速度曲线图Fig. 5 Displacement or angular velocity curve diagram of each joint
3.2 动态响应计算
对跨越双悬垂线夹工况下,跨越式巡线机器人机械臂进行动力学逆问题仿真计算,得到机器人机械臂各运动关节的驱动力或驱动力矩,如图6 所示。
由图6 可以看出各关节的驱动力及力矩变化趋势,以及所需的最大驱动力或力矩,可以以此为依据确定所需电机型号以及控制方案的选择。
4 结 论

图6 关节驱动力/力矩图Fig. 6 Joint driving force or torque diagram
用D-H 法构建跨越式巡线机器人空间坐标构,并以此坐标为基础,采用Lagrange 方法建立了机器人的动力学模型,得到了机器人各关节转角和连杆结构参数表示的动力学方程,并对机器人跨越双悬垂线夹此爬行工况进行了动态数值仿真及动态响应计算。 计算结果表明该跨越式巡线机器人系统的动力学模型是有效的。 同时给机械臂的驱动系统的设计提供了理论依据与参考,可用于该跨越式巡线机器人的控制。
[1] 蔡自兴. 机器人学[M]. 北京: 清华大学出版社,2000.
[2] 熊友伦. 机器人技术基础[M]. 湖北:华中科技大学出版社,1996.
[3] 美克莱格. 机器人学导论[M]. 北京:机械工业出版社,2006.
[4] Huston R L,刘又午. 多体系统动力学[M]. 天津:天津大学出版社,1991.
[5] 韩清凯,罗忠. 机械系统多体动力学分析、控制与仿真[M].北京:科学出版社,2010.
[6] 肖晓辉,史铁林,杜娥. 高压输电线路巡线作业机器人的动力学建模[J]. 机械与电子,2004(10):45-47.
XIAO Xiao-hui,SHI Tie-lin,DU E. Dynamic modeling of overhanging transmission-line inspection robot[J]. Machinery& Electronics,2004(10):45-47.
[7] Huston R L,PasserelloCE. Multi body structural dynamics including translation between the bodies[J]. Computers and Structure,1980(11):713-720.