一种小型固定翼无人机姿态测量系统的设计*
2015-08-18段照斌中国民航大学工程技术训练中心天津300300中国民航大学航空自动化学院天津300300
张 鹏,王 键,段照斌(.中国民航大学 工程技术训练中心,天津 300300;.中国民航大学 航空自动化学院,天津 300300)
一种小型固定翼无人机姿态测量系统的设计*
张鹏1,王键2,段照斌2
(1.中国民航大学 工程技术训练中心,天津 300300;2.中国民航大学航空自动化学院,天津300300)
针对小型固定翼无人机设计中对姿态测量系统小型化、低成本的需要,设计了以STM32F405为处理核心的低成本的姿态测量系统。系统采用MARG传感器方案,利用优化的梯度递减算法对采集的数据进行处理,将处理结果通过改进的互补滤波算法完成数据的融合,最终完成飞行姿态参数的解算。实验验证表明,所设计的系统具有实时性、低功耗、低成本、小型化等特点,能较好地完成无人机的姿态角数据的测量,具有较强实用性。
无人机;姿态测量;STM32F405
0 引言
固定翼无人机广泛用于航拍、测绘、监测等各个领域。姿态测量系统作为无人机飞行控制系统的重要组成部分,为无人机飞行控制系统提供控制所需的数据,能否准确地测量机体当前姿态角直接影响到固定翼无人机飞控算法的设计的稳定性、可靠性和实现的难易程度[1]。
随着无人机技术的不断发展,传统的框架式姿态测量系统质量大、体积大、可靠性低、成本高,已经不能满足新的设计需求。近年来,微电子及传感器技术和加工工艺的进步,设计出体积小、成本低、性能高的姿态测量系统成为可能,以嵌入式为内核的姿态测量系统已经进入实用阶段[2]。本文设计一种以ARM内核的STM32F405为处理核心的姿态测量系统,并采用梯度递减算法对采集的数据进行处理,通过改进的互补滤波算法进行无人机的姿态解算。该算法相较于传统的卡尔曼滤波算法具有运算量小、对采样频率要求低等优点[3],能够满足一般无人机对姿态测量的要求。
1 硬件设计
姿态测量系统是无人机的飞行控制系统的重要组成部分,针对无人机飞行控制系统的要求和姿态测量系统设计的需要,提出了无人机姿态测量系统的具体设计方案。系统主要由数据采集模块和数据处理模块组成,采用IIC完成传感器与处理器的连接,如图1所示。
数据采集模块主要完成无人机姿态数据的获取。通过三轴加速度计和三轴陀螺仪组合传感器MPU6050进行加速度和角速度的测量,免除了单独使用陀螺仪和加速度计时的轴间差问题,提高了采集的精度;采用带有数字接口的弱磁传感器HMC5883测量磁场强度,其自带的先进的磁阻传感器、集成电路放大器、自动消磁器、偏差校准,能保证其磁方位的测量精度在 1°~2°。

图1 硬件系统框架图
数据处理模块由微处理器、电源电路、置位复位电路、接口电路、存储电路组成。综合运算能力、负载能力、成本、输入输出接口等各方面因素,采用主频为168 MHz的STM32F405微处理器。通过电源电路保证设计中电源的稳定。
2 姿态解算设计
姿态解算算法测量系统设计的核心内容关系到处理数据的精确程度。所采用的算法通过四元数来对物体运动状态进行描述,四元数与欧拉角之间的转换关系如下[4]:
地球坐标系相对于机体坐标系的方向可以用四元数向量 q=[q1q2q3q4]来描述,则变化率q.微分方程计算如下:

其中,qˆ表示归一化的向量,⊗表示四元数乘法,ωx、ωy、ωz分别表示陀螺仪测得的机体角速度。则对q.进行数字积分计算可以计算t时刻的q为:

设地球坐标系下重力场的方向为g,机体坐标系下传感器的测量结果为s,那么利用四元数进行参数转换后的传感器的测量误差f为:

因此问题就简化为找到一个迭代的方法求解q,使得 f最小。当前,求解 fmin的方法较多,其中梯度下降算法是一种计算量较小并且收敛速度快的算法,适合在嵌入式计算平台上使用,本文采用了n次迭代的梯度下降算法求q,可以表述如下:

其中,J为q的雅克比矩阵。
用四元数法表示的地球坐标系下的姿态计算误差为:
同理,可以认为地球坐标系下磁场的方向为b,机体坐标系下传感器的测量结果为sm。
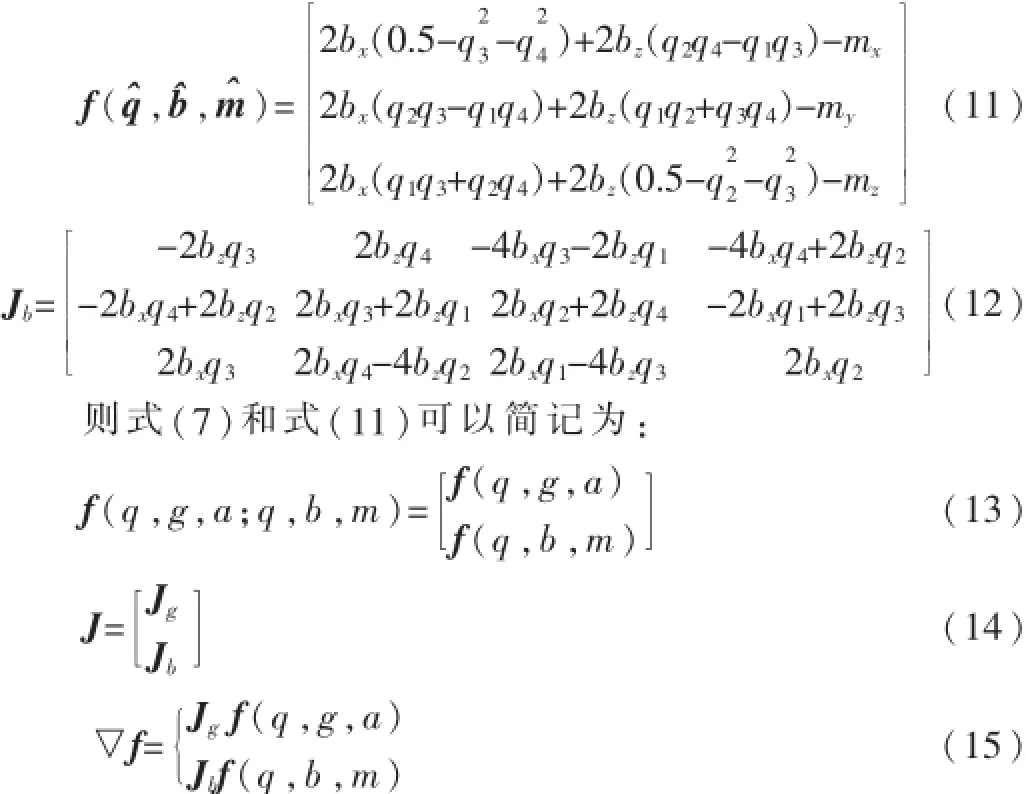
在实际环境中,磁场传感器的误差主要包括硬磁误差和软磁误差,其中,硬磁误差主要通过校正消除,软磁误差将由加速度计的计算来消除。b只包含水平和垂直分量,这样主要是为了消除由于倾斜带来的测量误差。

利用四元数进行参数转换后的传感器的测量误差为f,可以得到磁场方向的误差函数为:
q▽,t为迭代算法的估计值,迭代的起点由数据融合的方式决定。

μt的值控制q的收敛速率,计算公式如式(16)所示,其中 qω,t为陀螺仪测量到的四元数变化率,α与加速度计和磁强计测量噪声有关。

完成数据处理后需进行数据的融合,由于陀螺仪本身存在的漂移,短时间精度高;加速度计短时间测量精度较差,但对长时间测量误差不累积。利用频率上的互补特性进行数据融合,提高测量精度和动态响应[4]。
融合的具体过程如式(17)所示:

γt要保证由陀螺仪积分漂移带来的误差能够被q▽,t的收敛速率抵消掉,则有:

其中,β表示 q▽,t的发散速率。
由于 α≥ μt,可以化简如下:

综上所述,设计的算法软件实现流程如图2所示。
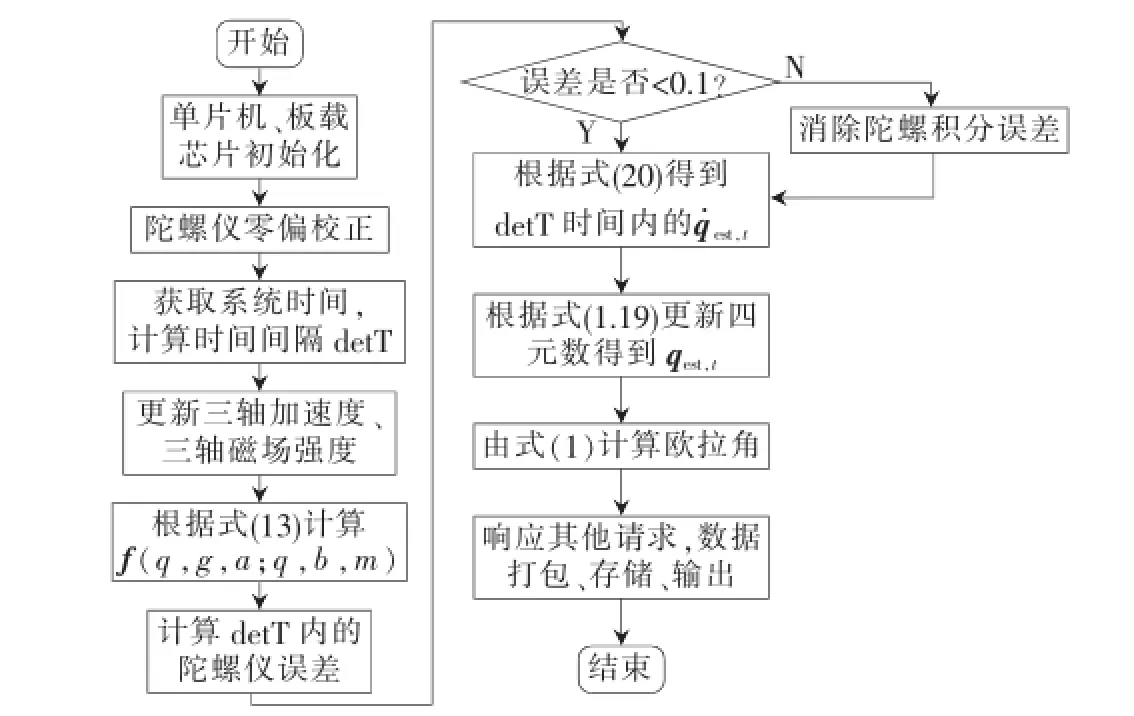
图2 姿态解算算法软件实现
3 实验验证与结果分析
为了较为全面地对设计的系统进行验证,将设计的系统固定在三轴惯导转台 (如图3所示)上进行飞行模拟试验。
三轴惯导转台主要应用于为惯性敏感器件和导航制导系统的性能测试等,具有高精度、高稳定性、高分辨力和宽动态范围,转台测量精度为 0.000 1,能够完成对设计的姿态测量系统的性能测试。设置并不断改变测试转台的运动角速度和运动的方式,模拟无人机的飞行运动。读取同一时刻设计的姿态测量系统和惯导平台的姿态数据进行记录,如图4所示,其中data1为测量值,data2为惯导转台测量值。
通过三轴惯导平台的性能测试结果可知,设计的姿态测量系统,俯仰角和滚转角测试误差小于1°,偏航角测试误差小于3°,能够满足无人机对姿态的需求。

图3 三轴惯导平台
4 结论
本文设计了一个结构简单、成本低的小型无人机姿态测量系统,并进行了飞行参数的解算。性能测试结果表明,设计的姿态测量系统误差较小,能够满足实际无人机对的姿态参数测量的需求。

图4 姿态测量的结果
[1]粱延德,程敏,何福本,等.基于互补滤波器的飞行器姿态解算[J].传感器与微系统,2011,30(11):56-58.
[2]陈文蓉,李杰,蒋窍,等.基于 FPGA和DSP的嵌入式导航计算机的设计[J].计算机测量与控制,2012,20(12):3374-3376.
[3]施闻名,徐彬,陈利敏.捷联式航姿系统中四元素算法Kalman滤波器的实现研究[J].自动化技术与应用,2005,24(11):6-8.
[4]郭晓鸿,杨忠,陈喆.EKF和互补滤波器在飞行姿态确定中的应用[J].传感器与微系统,2011,30(11):149-152.
Design of attitude measurement system in mini fixed-wing UAV
Zhang Peng1,Wang Jian2,Duan Zhaobin2
(1.Engineering Techniques Training Center,Civil Aviation University of China,Tianjin 300300,China;2.Aeronautical Automation College,Civil Aviation University of China,Tianjin 300300,China)
For the requirements of miniaturized and low-cost of the attitude measurement system to the mini fixed-wing unmanned aerial vehicle(UAV)design,an attitude measurement system based on STM32F405 was designed.The system calculated the flight parameters by using the MARG(Magnetic,Angular Rate,and Gravity)sensors,the collected data disposed by an optimized gradient descent algorithm and the result of dispose would be fused by improved complementary filter.The experimental data shows that the attitude measurement system has the characteristics of real-time,low power consumption,miniaturization and low cost.It can better finish the measurement of UAV′attitude angle data and has strong practicability.
UAV;attitude measurement;STM32F405
TP212
A
1674-7720(2015)02-0035-03
民航局科技项目(MHRD201004)
(2014-08-22)
张鹏(1963-),男,硕士,教授,硕士生导师,主要研究方向:民用航空器导航、控制及信息处理技术。
王键(1988-),男,硕士研究生,主要研究方向:导航、制导与控制。
