基于视觉显著性及多特征分析的目标检测
2015-08-09刘效勇邵建新
卢 佩,刘效勇,邵建新
(石河子大学 a.信息科学与技术学院;b理学院;c. 师范学院,新疆 石河子 832000)
0 引言
作为智能信息处理的关键环节,静态图像目标检测一直以来为机器视觉领域的研究热点之一,在国民经济、航天/空间技术等诸领域发挥重要作用.
当前,虽已有诸多较理想目标检测算法[1-3],但大多算法[4-7]均依据滑动窗口机制.由于该类方法均采用“穷举”策略,故检测速度慢、算法效率低.
相对而言,生物视觉在目标检测过程中天生具有高效性,即便在遮挡、形变、光照等因素作用下,仍然能快速识别目标.迄今为止,研究人员虽未能透彻分析其机理,同时也没能设计出与之相媲美的类生物视觉模型,但研究表明:生物视觉具有视觉注意性,即外界环境信息并非等同重要,大脑只对重要的感知信息给出响应.近年来,该特性分析已得到广泛关注,视觉“显著性”模型(即模拟上述机理求图像中具有显著性的区域)也随之应运而生:Itti等[8]于2000年从生物视觉和神经学角度出发设计了Itti视觉模型; 2007年,Hou等[9]利用FT变换分析图像频谱残差信息,并通过图像缩放操作获取显著性图;进一步,Hou等[10]于2012年定义了一种图像描述子以表示频域相位信息,然后将其变换到空域即可将图像大部分能量汇聚在具有一定空间稀疏性的显著位置处.然而,视觉显著性分析虽能粗略估计出显著目标的位置,但不能指出目标是什么.
同时,对目标所属特性进行描述具有多方式性.若基于单一特征表征目标,则其表征能力具有局限性,且直接制约着建模过程及算法性能.而多特征分析可进一步提升系统检测性能[11],且已成为目标检测领域普遍采用有效方式之一[12].
因此,针对现有视觉显著性模型不能指出目标是什么且单一特征描述目标具有局限性等问题,本文从分析显著性模型入手,结合描述目标的多特征分析方法,基于朴素贝叶斯模型设计目标检测算法.实验结果表明:多特征分析可有效描述目标进而使模型更具区分性.与依据滑动窗口策略的目标检测方法相比,显著性分析可使算法具有对目标区域的主动选择性,进而可提高模型的检测效率.
1 显著性模型设计及理论分析
命题1 对描述子进行重构时,显著图中显著区域的位置与前景目标的位置符合关系:

其中,〈·〉表示内积,Ωb是b=DCT(b)的支撑集,‖·‖为L2范数.当背景在DCT变换域中越稀疏,式(1)的期望值越高.

上述两个表达式从理论上证明了模型的有效性,但需满足一定条件,即目标信号f在标准空间基下需要具有稀疏性.经实验分析可进一步得出:当图像中目标所在区域较小时,其显著性较理想;反之,当目标占据图像大多区域时,其边缘显著性较强,而目标整体的显著性分析结果不理想.在此,本文通过引入相似空间区域分配相近显著性值这一约束条件来改进上述算法.
(1)设Ichan(i)表示不同色彩通道下的图像,则与之对应的描述子可表示为:
IS(Ichan(i))=sign(DCT(Ichan(i))).
(3)
对式(3) 执行IDCT变换,并对其结果进一步执行Hadamard运算:
S(Ichan(i))=IDCT(IS(Ichan(i)))∘IDCT(IS(Ichan(i))).
(4)
(2)经分析知,上述显著性值具有稀疏性,因此,可仅对能有效描述目标的前若干个非零显著性值进行分析,而忽略那些显著性不明显的数值.进一步,将该分析结果与在各通道下的原始图像数据作为输入,当图像中的像素与显著值所在处的像素色彩值相近时,则给该像素位置赋予同一显著值,最终可得到各通道下图像新的显著性值分布图.
(3)对上述得到的不同通道下的显著图对应位置处的显著性值求平均:
SalMap=mean(SalMap(Ichan(i))).
(5)
然后对式(5)的输出结果执行高斯核卷积运算:
SalMap_out=g*SalMap,
从而得到原始图像中的目标显著性分析结果.
图1为基于上述模型的部分PASCAL VOC cars的显著性分析结果.

图1 PASCAL VOC cars 及对应显著图Fig. 1 PASCAL VOC cars and its saliency maps correspondingly
由理论分析及实验结果可知,该方法简单、能够有效模拟视觉注意的主动选择机制,但不具有区分、定位目标的能力.因此,本文旨在联合目标显著性模型,更进一步地,在多特征分析及有效结合下设计目标候选区域检测算法.
2 基于多特征分析的目标区域检测
2.1 多特征分析
一般而言,目标与背景具有明显可区分性,可用显著、色异、封闭轮廓等特性描述目标.本文依据区分模型[5,13]建模过程,通过多特征分析提取能有效表征目标的特征,并在朴素贝叶斯理论框架下实现目标所在区域的判定.
2.1.1 多尺度显著性特征(MP)
2.1.2 颜色对比特征(CA)
在此,用CA特征来描述目标前,定义图像任一区域ω的周边因子Cirj(ω,θCA)为由θCA作用在其内所有方向上且满足式(7)的矩形环.
那么,表征区域ω与其周边因子Cirj(ω,θCA)的CA特征CA(ω,θCA)可通过式(8)得到.
CA(ω,θCA)=χ2(h(ω),h(Cirj(ω,θCA))).
(8)
此处,h为区域ω及其周边因子在L*a*b空间的直方图,并用χ距离度量其差异,参数θCA由学习得到.
由于目标和背景通常具有明显色彩差异,故该特征能有效将目标从背景中区分出来,但不能保证其完整性.
2.1.3 边缘密度特征(EC)
首先,定义区域ω的内环因子Inn(ω,θEC),即
那么,EC特征EC(ω,θEC)可通过下式给出:
其中:IEC(p)∈{0,1}经Canny运算得出,Len(·)为求周长,θEC由学习得到.
该特征对边缘密度较集中的区域描述能力强,但也很容易把非目标而边缘密度较集中的区域判断成目标区域,故会带来虚警.
2.2 参数学习


2.2.2θCA、θEC

(12)

2.3 多特征分析下目标候选区域判定
由于上述特征均具有局限性:MP可粗略估计目标的位置;CA虽能有效分析出目标所在准确位置,但不能保证其完整性;EC会带来虚警.因此需相互补充并有效结合.
本文基于朴素贝叶斯模型,对每个测试图中的随机采样区域,结合参数学习过程得到的先验信息,分别在MP、CA、EC特征下依据式(13)依次求该采样区域的后验概率值(权重),最后将权重值大的n个区域(此处,n=10)视为目标所在的候选区域ωi.
图2为采用该方法对PASCAL VOC数据库测试图进行分析得到的评分值高的前10个候选区域输出结果的显示.由实验结果知,本算法所判定输出候选区域基本上能部分或完整地涵盖着目标,从而证明该方案具有可行性.另外,还可看出:若测试图中目标的显著性不理想,那么得到的候选区域所涵盖目标的能力也会变差.

图2 部分测试图的候选区域判定结果Fig. 2 Decision of candidate regions for part test images
2.4 目标所在区域定位
在目标所在候选区域ωi被判定后,最理想表征目标的区域ωopt的选择即实现目标检测则为本方案最终的目标.
首先,对上述测试图进行显著性分析,并对显著图执行简单阈值分割操作以得到目标显著性信息psal.
然后,通过式(14)实现目标区域定位.
ωopt={ωi||ωi⊃psal|/|ωi|≥
thr1,|∑psal|/|ωi|≤thr2},
(14)
其中,阈值thr1=0.5,thr2=1.25依照经验给出.
2.5 系统设计流程
综合上述分析,系统完整设计流程以及参数训练流程分别如图3、图4所示.
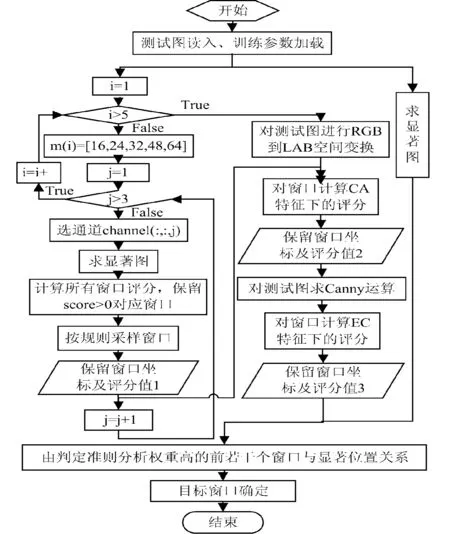
图3 系统设计流程图Fig. 3 The flowchart of the system

图4 多特征分析下参数训练流程图Fig. 4 Parameters training with multi-feature analysis
3 系统实验结果及结果分析
该算法在Linux系统下运行,运行环境为MATLAB R2013a.对PASCAL VOC 06 test中含有car类目标的50幅测试图随机抽取65个目标,且这些自然图像不同程度地存在多尺度、多视角、光照不均、运动模糊等现象或图像含有多个目标.部分测试图检测结果如图5所示.

图5 部分测试图car类目标检测结果Fig. 5 Results of objects detection for part images with cars
经分析知,若目标具有较显著的视觉显著性,那么测试图无论是否存在多尺度、多视角,其目标检测结果均比较理想;若目标显著性不明显,则检测结果亦不理想.另外,显著性分析可使算法具有对目标区域的主动选择性,故其检测速度较理想,平均为4.15 s/幅.诚然,与现有目标检测模型相似,该方案亦不可避免地存在漏检、虚警现象.
为了对比本文算法在单一特征和多特征分析下的目标检测性能,分别对上述50幅测试图共65个car类目标进行检测,评判标准基于PASCAL准则,最终检测结果如表1.通过实验得出,多种特征的有效结合比基于任一单一特征的检测结果要优,多特征分析可加强对目标的描述能力.因此,多特征分析实现目标检测更具可行性.

表1 单一特征与多特征综合作用下检测结果比较
此外,为进一步分析该方案性能,实验中,分别求取在MP、CA、EC特征及MP+CA+EC多特征结合下的候选区域包含标定目标百分比以及检测输出区域覆盖标定目标百分比值,并绘制曲线图,用曲线左边区域面积值(Area to the left of the curve,ALC)来衡量其性能,所得到的曲线图如图6所示.

图6 系统性能比较曲线图Fig. 6 The plot of system performance comparison
由图6中各种特征选取下算法对应ALC值可知:多特征的结合运用是可取且行之有效的,因为每种特征均具局限性,而多特征结合可相互补充,从而使本文方法所检测出候选区域包含标定目标的百分比较理想,也即本文模型对目标更具区分性.
4 结语
本文算法的初衷是在非滑动窗口策略下,设计基于显著性及多特征分析的目标区域检测方案.对测试图,先随机生成能遍布于整幅图且大小不一的多个候选区域,随后基于贝叶斯模型计算各特征描述下随机采样区域的最大后验概率值,并用值的大小标识该区域包含目标的可能性,从而进一步估计出目标区域的位置.因此,当随机采样参数值一定时,测试图的大小对系统检测速率没有本质影响,且由于引入显著性分析,使得算法具有对目标区域的主动选择性,而无须考虑基于滑动窗口策略的窗口选择/更新等问题,故其检测效率较理想.此外,多特征的结合比任一单一特征更能有效描述目标以使模型更具区分性,故其检测效果相比较优.但系统仍不可避免地存在漏检、虚警现象.后续工作思路:通过学习建立能表征目标类、不为其他类所共享的特征字典,然后对由本文方法得到的检测区域进一步判断,从而提高系统检测性能.
