Cooperative Compressive Spectrum Sensing in Cognitive Underwater Acoustic Communication Networks
2015-08-07ZUOJiakuo左加阔DAOVanphuong陶文凤BAOYongqiang包永强ZHAOLi赵力ZOUCairong邹采荣
ZUO Jia-kuo(左加阔),DAO Van-phuong(陶文凤),BAO Yong-qiang(包永强),ZHAO Li(赵力),ZOU Cai-rong(邹采荣)
1 School of Internet of Things,Nanjing University of Posts and Telecommunications,Nanjing 210003,China
2 Key Laboratory of Underwater Acoustic Signal Processing of Ministry of Education,Southeast University,Nanjing 210096,China
3 School of Communication Engineering,Nanjing Institute of Technology,Nanjing 210096,China
Cooperative Compressive Spectrum Sensing in Cognitive Underwater Acoustic Communication Networks
ZUO Jia-kuo(左加阔)1*,DAO Van-phuong(陶文凤)2,BAO Yong-qiang(包永强)3,ZHAO Li(赵力)2,ZOU Cai-rong(邹采荣)2
1 School of Internet of Things,Nanjing University of Posts and Telecommunications,Nanjing 210003,China
2 Key Laboratory of Underwater Acoustic Signal Processing of Ministry of Education,Southeast University,Nanjing 210096,China
3 School of Communication Engineering,Nanjing Institute of Technology,Nanjing 210096,China
Because of the specific of underwater acoustic channel,spectrum sensing entails many difficulties in cognitive underwater acoustic communication(CUAC)networks,such as severe frequency-dependent attenuation and low signal-to-noise ratios.To overcome these problems,two cooperative com pressive spectrum sensing(CCSS)schemes are proposed for different scenarios(with and without channel state information).To strengthen collaboration among secondary users(SUs),cognitive central node(CCN)is provided to collect data from SUs.Thus,the proposed schemes can obtain spatial diversity gains and exploit joint sparse structure to improve the performance of spectrum sensing.Since the channel occupancy is sparse,we formulate the spectrum sensing problems into sparse vector recovery problem s,and then present two CCSS algorithm s based on path-w ise coordinate optim ization(PCO)and multi-task Bayesian com pressive sensing(M T-BCS),respectively.Simulation results corroborate the effectiveness of the proposed methods in detecting the spectrum holes in underwater acoustic environment.
cognitive underwater acoustic communication(CUAC); spectrum sensing;compressive sensing;path-wise coordinate optimization(PCO);multi-task Bayesian compressive sensing(MTBCS)
Introduction
Practical application of high-speed underwater acoustic communication(UAC)is impeded by typical underwater acoustic channel,including severe frequency-dependent attenuation,low speed of wave propagation,excessive multipath delay spread and noise[1].To realize a stable and high rate UAC system,cognitive underwater acoustic communication (CUAC)is proposed.Similar to terrestrial cognitive radio (CR),CUAC is an intelligentand high reliable communication system utilizing all available resourcesmore efficiently.
Recently,many researches have been presented for CUAC.The application of software defined radio techniques to UAC and the definition of cognitive underwater communication system were first discussed in Ref.[2].Bandw idth management by utilizing dynam ic spectrum access and dynamic spectrum sharing were investigated for CUAC in Ref.[3]. Channel allocation schemeswere also proposed tomaximize the channel capacity in Refs.[4-5].An intelligent underwater communication system was proposed to accurately measure the underwater channel parameters and estimate underwater channel models in Ref.[6].Reference[7]studied cognitive access for underwater active sensor network where each cognitive node applied pattern analysis procedure to evaluating the presence of interference and its nature.In Refs.[8-9],a cognitive control architecture for automous marine vehicles was proposed to reduce overhead costs and level of operator intervention.
While the research on CUAC is still in its infancy,the researches above have outlined the general framework. Spectrum sensing is a key step for CUAC.Because the underwater environment varies significantly,many spectrum sensing techniques in CR can not be simply transplanted to CUAC.So,there is a pressing requirement for efficientand low complexity spectrum sensing methods for CUAC.Analog to terrestrialw ireless communication,due to the low percentage of spectrum occupancy in UAC,the signals are very sparse in the frequency domain.For sparse signals,recent advances in compressed sensing(CS)[10-11]and multi-task Bayesian compressive sensing(MT-BCS)[12-13]have demonstrated the principle of reliable signal recovery via computationally feasible algorithms.Several schemes based on CS[14-26]and BCS[27-29]have been developed to detectwideband spectrum for CR.
In CUAC networks,underwater propagation environments are highly complex and uncertain,and the signal transmitted in underwater channel usually experiences deep fading.In addition,nodes or users are battery operated and the computing resources are very limited.Spectrum sensing in CUAC entails severe challenges.To overcome these problems,inspired by Ref.[16],we present two new cooperative compressive spectrum sensing(CCSS)schemes for CUAC networks. Spectrum sensing algorithm in Ref.[16]is a single secondary user(SU)scheme which can not be used for CUAC.Different from Ref.[16],we first consider the frequency-dependent attenuation in spectrum sensing and explore amore complicated scenario thatmultiple SUs collaborate to sense spectrum in an underwater network instead of a single SU.Two new CCSS models for different scenarios,i.e.,with and without channel state information(CSI),are presented.The CCSS problems are first formulated as two sparse vector recovery problems,then path-w ise coordinate optimization(PCO)[30]and MTBCS[13]are used to solve the two problems,respectively.At last,CCSSwith CSIand CCSSwithout CSIare proposed.
The rest of this paper is organized as follows.In section 1,a brief introduction of underwater acoustic channel model is given.In section 2,the signalmodel and problem statement is presented.The two new CCSS schemes are described in section 3.Simulation results are given in section 4 and conclusions are drawn in section 5.
1 Underwater Acoustic Channel Model and the Ambient Noise in Underwater
Usually,the underwater acoustic channel transfer function is defined as:

where P is the total number ofmultiple propagation path,Γpis the addition losses,d0is the distance between the transm itter and the receiver,dpis the length of the p-th path,τp=dp/c is the delay of the p-th path(c=1 500 m/s is the normal speed of sound underwater),j is the imaginary unit,and A(d,f)is the path losswhich is defined as

where A0is a unit-normalizing constant,k0is the spreading factor,and a(f)is the absorption coefficient.
The ambient noise in underwater depends on four sources: turbulence Nt(f),shipping Ns(f),waves Nw(f),and thermal noise Nth(f)(the details definitions of the four sources can be found in Ref.[1]).Therefore,the overall power spectrum density(p.s.d)can be w ritten as

2 SignalModeland Problem Statement
Consider a simplified schematic diagram of CUAC network with cognitive central node(CCN)as shown in Fig.1.Assume primary users(PUs)can be heard by all SUs,and during detection interval,higher-layer protocols can guarantee that all SUs stay silent when the PUs emit spectral power.The total bandw idth of the underwater acoustic channel of W(Hz)is shared by PUs and SUs.Assume that each user in CUAC network needs a bandw idth of B(Hz)for communication.The entire channel is divided into M(M=W/B)non-overlapping subchannels and the m th subchannel's center frequency is denoted by fm.

Fig.1 Simplified schematic diagram of CUAC network
Suppose that there are I active PUswhose transmitted signals are denoted by s(i)(t)(i=1,2,…,I)and J SUs in the CUAC network.The received signal at the j th SU is given by

where*denotes the convolution operation,h(i,j)(t)is the underwater acoustic channel impulse response from i th PU to j th SU,and w(j)(t)is the underwater noise at j th SU.The equivalent expression of Eq.(4)in frequency domain is

where X(j)(f),H(i,j)(f),S(i)(f),and W(j)(f)are the Fourier transformations of x(j)(t),s(i)(t),h(i,j)(t),and w(j)(t),respectively.

Assume the amplitude of S(i)(f)is flat,which meansSince PUs occupy nonoverlapping channels,by replacing X(j)(f)in Eq.(6)from Eq. (5),after some algebraicmanipulation,yield


To further facilitate the representation of Eq.(8),define:

Then,Eq.(8)can be w ritten in a brief form as:

As in Ref.[16],a random K×M matrixΦ(j)is provided by the j th SU.The matrix is used to generate K filters whose transfer functionis given by

Sample signal x(j)(t)to get the time sequence vector x(tj), and then feedinto the filters.The output at the k th filter is


Combining with Eq.(10),the above K equations for the j th SU can be briefly w ritten in the vector form as

Because PUs occupy non-overlapping channels and the spectrum utilization is low,esis very sparse.The esis composed of which can be used to detect PU signal.Therefore, spectrum sensing boils down to recover esfromU(j).Usually,it is difficult to acquire CSI matrix Q(j)in CUAC.When the underwater acoustic channel impulsewith responses are unknown,Eq.(14)can be expressed as:

In a summary,depending on whether CSI can be acquired by each SU,spectrum sensing boils down to estimate esor from y(j).Usually,SUs prefer to know which of the M subchannels are unoccupied rather than the values of signal energy in each subchannel.Thismeans that the aim of spectrum sensing is to determine the channel occupancy by an M×1 binary state vector d.When d[m]=1,the m th subchannel is occupied;when d[m]=0,the m th subchannel is idle.Hence,the elements of d can be defined as follows:
(1)with CSI

(2)absence of CSI
d[m]=

3 CCSS for CUAC
Since underwater propagation environments are highly complex and uncertain,the signal transm itted in underwater acoustic channel usually experiences deep fading,and the performance of spectrum sensing by single SU will be very disappointing.To overcome the problem above,SUs must collaborate to sense the spectrum.Via obtaining spatial diversity gains and exploiting joint sparse structure,high spectrum sensing performance can be achieved.As shown in Fig.1,CCN is provided to strengthen collaboration among SUs.Each SU j transmits itsmeasurement vectors y(j)and U(j)or A(j)to CCN,then CCN performs spectrum sensing utilizing the collected data.
In this section,we develop two CCSS algorithms for CUAC networks.Section 3.1 depicts the algorithm when SUs know CSI.The algorithm in absence of CSI is discussed in section 3.2.
3.1 CCSSwith CSI
Since esis sparse,recovery of escan be solved by minim izing the l1-regular formulation via convex optim ization as
whereλis a positive scalar weighting coefficient.Optim ization of Eq.(16)can be solved using standard optimization routines. However,research in Ref.[30]has shown that PCO is well suited for solving the above problem,and yields the solution in much less time than standard convex optimizer.
Introduce the iteration index t,and at each iteration index t,the elementsare updated iteratively by solving: where is the q th column of U(j).Since es[n]≥0,the closed form solution of Eq.(17)is
es[n](t+1)=

Now,we have presented a new CCSS algorithm based on PCO when CSI is known.We term thismethod as CCSS-CSI and tabulate it as Algorithm 1.The process of the proposed CCSS-CSIalgorithm is shown in Fig.2.

Fig.2 The process of the proposed CCSS-CSIalgorithm
3.2 CCSSwithout CSI
As shown in Eq.(15),when CSI is unknown,spectrum sensing boils down to estimate e~(sj)from y(j).Recently,MTBCS[13]is proposed to solve this problem from Bayesian perspective.Simulation results show that MT-BCS is robust to noise and often outperforms the traditional CSmethods.Based onMT-BCS,we present a new CCSS scheme for CUAC network.
Assuming p(y(j)|e~(j)s)to be Gaussian with noise variance α-1(precisionα),thus we have the Gaussian likelihood00model,

According to Ref.[13],we have

and the posterior covariance and mean are as follows,respectively,

With Eqs.(20)and(21),we obtain the posterior density(precisionαm).SinceofwhereΓ=diag(α1,α2,…,αM).Since≥0 andμjis the expectation of it means thatμj≥0 has the same sparsestructure asand can be used to detect the spectrum holes. Letμj[m]denote the m th componentofμj.Whenμj[m]>0,the m-th subchannel is occupied by one of PU signals;when μj[m]=0,none of PU signals are em itted on the m th subchannel.
In MT-BCS,is shifted to estimate a hyper parameter vectorαwith correct number and location of nonzero elements.To get the optimalαandα0,we can maxim ize the logarithm L(α,α0),which is defined as

Skipping details can be found in Ref.[13],and by introducing iteration index t,the optimal solutions ofαandα0can be updated by
According to Eqs.(23)and(24),the posterior covarianceΣjand meanμjcan be updated by:

whereμj[m]is the m th component ofμj,Σj[m]is the m th diagonal element ofΣj,andΓ(t)=diag(α1(t),α2(t),…,αM(t)).
Now,we have presented another CCSS algorithm based on BCSwhen CSI is unknown.We term this method as CCSSUCSI and tabulate it as Algorithm 2.The process of the proposed CCSS-UCSIalgorithm is shown in Fig.3.

Fig.3 The process of the proposed CCSS-UCSIalgorithm
4 Performance Simulation
For the purposes of evaluation,the true support is denoted by d0and the estimated support is denoted by d-.Performance metrics thatwe adopt are probabilities of detection Pdand false alarm Pf,which we average over all sub-channels as[15]
where1 denotes the all-one vector.
Define the compression ratiow hen CSI is known,andwhen CSI is unknown,respectively.Since our simulations is to evaluate the performance of spectrum detection algorithms,we assume that the underwater acoustic signals of transm itters can be accurately received by receivers.
In this section,we analyze the spectrum sensing performances of the proposed schemes.The underwater acoustic channel and embedded noise are simulated according to the models Eqs.(1)and(3)with parameters in Table 1.SUs and PUs are random ly distributed in 500m×500m underwater area. We obtain the average performances of spectrum detection algorithms according to 200 times different distribution of SUs and PUs locations.The available bandw idth W is partitioned into M=20 equal-bandw idth subchannels.Asssum the total number of PUs is 3,and the CUAC network adopts frequency division multiple access(FDMA)modulation.Define thechannel occupancy ratio,i.e.,the sparsity ratio,as the ratio of total number of PUs and the total number of subchannles. Therefore,the occupancy ratio is 15%.

Table 1 Parameters of the underwater acoustic channel
4.1 Performance analysiswith CSI
We compare the proposed CCSS-CSI scheme with the single scheme in Eq.(16)with J=1,which is denoted by SCSI.Figure 4 shows the average receiver operating characteristics(ROC)of the two schemeswith parameters:J= 5,v=75%,and rSNR=-5 dB(for S-CSI J=1),where rSNRdenotes the value of signal-to-noise ratio(SNR).The proposed CCSS-CSI scheme has a better performance than the single scheme S-CSI.

Fig.4 ROC performances at J=5,v=75%,rSNR=-5 dB
To show the gains from spatial diversity and joint sparsity structure,we compute the average probability of detection versus the number of cooperation SUs J in Fig.5.As shown in Fig.5,the baseline is the performance of S-CSI.Since there is no cooperation in the single scheme,the performance of S-CSI isworse and do not increasewith the number of cooperation SUs J increasing.By utilizing spatial diversity gains and exploiting joint sparsity,the performance of CCSS-CSI is improved. Figure 6 depicts the average probability of detection versus compression ratio v.We adjust the compressed ratio v grows from 60%to 100%,and find that the performance of all algorithms grows as v increases,but the complexity of the recovery algorithms also increases.So,there is a trade-off between performance and compressed ratio.Figure 7 shows the average probability of detection versus SNR.Apparently,the probability of detection improves as SNR increases.
4.2 Performance analysiswithout CSI
To corroborate the effectiveness of CCSS-UCSIalgorithm,we compared CCSS-UCSI algorithm with S-UCSI algorithm in Ref.[16].S-UCSI algorithm is the single user spectrum sensing algorithm which is used to solve problem(15)with J= 1.To exploit the effect of CSIon the algorithms,we compare the unknown CSI algorithms mentioned above with CCSS-CSI scheme which has evaluated in section 4.1.Figure 8 depicts the average ROC for different algorithms with parameters:J=5,
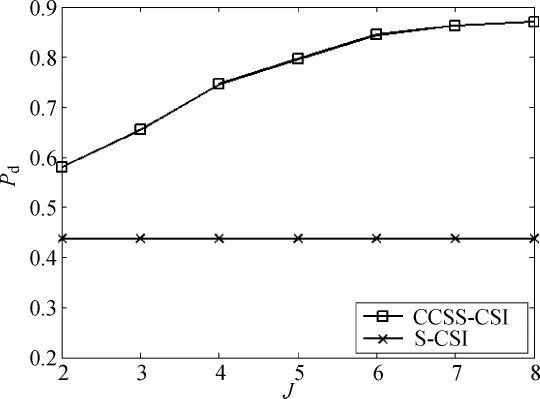
Fig.5 Probability of detection versus the number of cooperation SUs at v=75%,rSNR=-5 dB,Pf=9%
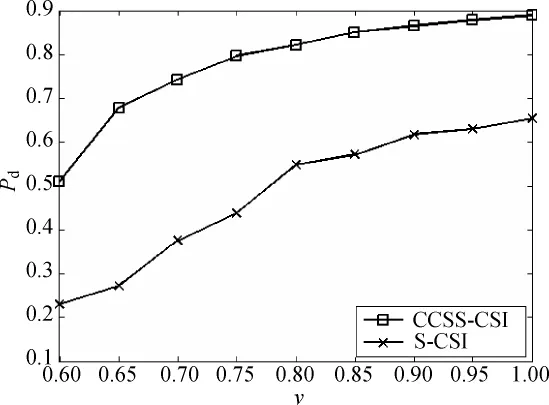
Fig.6 Probability of detection versus the compressionratio v at J=5,rSNR=-5 dB,Pf=9%
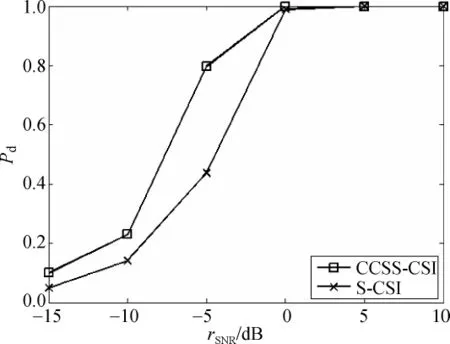
Fig.7 Probability of detection versus rSNRat J=5,v=75%,Pf=9%
v=75%,and rSNR=-5 dB(for S-UCSI in Ref.[16],J= 1).Since the channel state information helps to identify the operating scenarios,CCSS-CSIalgorithm can improve spectrum sensing performance than CCSS-UCSI.We also compare CCSSUCSI algorithm with S-UCSI algorithm in Fig.9.Via SUs cooperation,the CCSSI-UCSI algorithm can acquire spatial diversity gains and exploit joint sparsity of signals.However,there is only one SU to sense the spectrum.Therefore,the proposed CCSSI-UCSI scheme also has a better performance than S-UCSI.
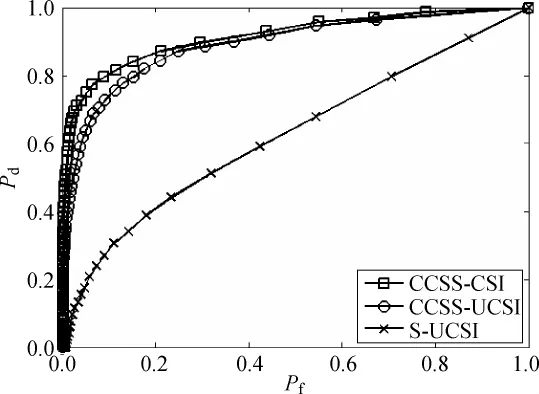
Fig.8 ROC performancesat J=5,v=75%,rSNR=-5 dB
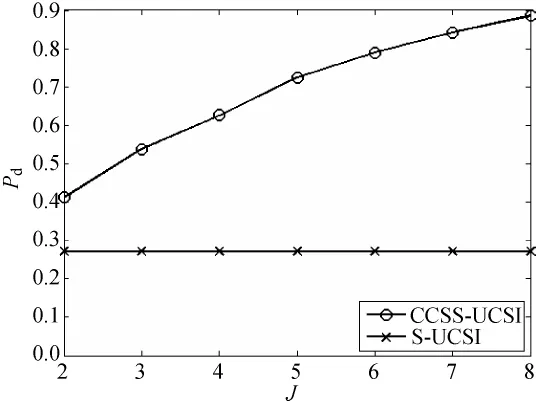
Fig.9 Probability of detection versus the number of cooperation SUs at v=75%,rSNR=-5 dB,Pf=9%

Fig.10 Probability of detection versus the compressionJ=5,rSNR=-5 dB,Pf=9%
The effects of the three quantities are respectively evaluated in Figs.9-11.These results depict similar properties corresponding to the results in section 4.1.
5 Conclusions
This paper studied spectrum sensing in CUAC networks. We first established two sparse spectrum sensing models for different scenarios(with and without CSI),and then proposed two CCSS algorithms based on PCO and MT-BCS,respectively.In the proposed two schemes,via collaboration among multiple SUs,the algorithms can obtain spatial gains diversity against underwater channel fading,and enhance sparsity recovery ability by exploiting joint sparse structure.To corroborate the effectiveness of the proposed algorithms,we compared the algorithms with two single user spectrum sensing algorithms.Simulation results show that our proposed algorithms can improve the spectrum sensing performance via multiple SUs cooperation.In the experiment simulation,the underwater acoustic channel is non-time varying channel and shipping noise and w ind noise are neglected in the simulation. In our futurework,wewill investigate spectrum sensing in time varying underwater acoustic channel,and analyze the effection of time varying underwater acoustic channelmodel and the four noise sources(turbulence,shipping,waves,and thermal noise)to spectrum sensing.

Fig.11 Probability of detection versus rSNRat ratio v atJ=5,v=75%,Pf=9%
[1]Polprasert C,Ritcey J A,Stojanovic M.Capacity of OFDM Systems over Fading Underwater Acoustic Channels[J].IEEE Journal of Oceanic Engineering,2011,36(4):514-524.
[2]Wang Y G,Tang JS,Pan Y,et al.Underwater Communication Goes Cognitive[C].OCEANS,Quebec,Canada,2008:15-18.
[3]Tan H P,Seah W K G,Doyle L.Exploring Cognitive Techniques for Bandw idth Management in Integrated Underwater Acoustic Systems[C].OCEANS,Quebec,Canada,2008:1-7.
[4]Torre D,Charbiwala Z,Friedman J,et al.Spectrum Signaling for Cognitive Underwater Acoustic Channel Allocation[C]. INFOCOM IEEE Conference on Computer Communications,San Diego,CA,USA,2010:1-6.
[5]Bicen A O,Sahin A B,Akan O B.Spectrum-Aware Underwater Networks:Cognitive Acoustic Communications[J].IEEE Vehicle Technology Magazine,2012,7(2):34-40.
[6]Ahmed S,Arslan H.Cognitive Intelligence in UAC Channel Parameter Identification,Measurement,Estimation,and Environment Mapping[C].OCEANS,Bremen,Germany,2009:1-14.
[7]BiagiM,Rinauro S,Cusani R.UWA Interference Analysis for Cognitive Access[C].OCEANS-Europe,Begen,Norway,2013:1-5.
[8]Insaurralde C C,Cartw right J J,Petillot Y R.Cognitive Control Architecture for Autonomous Marine Vehicles[C].IEEE International Systems Conference,Vancouver,BC,USA,2012: 1-8.
[9]Insaurralde C C,Petillot Y R.Intelligent Autonomy for Collaborative Intervention M ission of Unmanned Maritime Vehicles[C].OCEAS,San Diego,CA,USA,2013:1-6.
[10]Donoho D L.CompressedSensing[J].IEEE Transactions on Information Theory,2006,52(4):1289-1306.
[11]Cotter S F,Rao B D,Engan K,et al.Sparse Solutions to Liner Inverse Problems with Multiple Measurement Vectors[J].IEEE Transactions on Signal Processing,2005,53(7):2477-2488.
[12]Ji S H,Ya X,Carin L.Bayesian Compressive Sensing[J]. IEEE Transactions on Signal Processing,2008,56(6):2346-2356.
[13]Ji S H,Dunson D,Carin L.Multitask Compressive Sensing[J].IEEE Transactions on Signal Processing,2009,57(1): 92-106.
[14]Tian Z,Giannakis G B.Compressed Sensing for W ideband Cognitive Radios[C].International Conference on Acoustics,Speech,and Signal Processing,Honolulu,HI,USA,2007: 1357-1360.
[15]Polo Y L,Wang Y,Pandharipande A,etal.CompressiveW ide-Band Spectrum Sensing[C].International Conference on Acoustics,Speech,and Signal Processing,Taipei,China,2009: 2337-2340.
[16]Havary-Nassa V,Hassan S,Valaee S.Compressive Detection for W ide-Band Spectrum Sensing[C].International Conference on Acoustics,Speech,and Signal Processing,Dallas,TX,USA,2010:3094-3097.
[17]Nasif A O,Tian Z.Collecting Fusion Gains for Detection of Spread Spectrum Signals Using Compressive W ideband Radio[C].IEEE International Conference on Communications,Budapest,Hungary,2013:2712-2716.
[18]Tian Z,Blasch E,Li W H,et al.Performance Evaluation of Distributed Compressed Wideband Sensing for Cognitive Radio Networks[C].International Conference on Information Fusion,Cologne,Germany,2008:1-8.
[19]Zeng F Z,Li C,Tian Z.Distributed Compressive Spectrum Sensing in Cooperative Multihop Cognitive Networks[J].IEEE Journal of Selected Topics Signal Process,2011,5(1):37-48.
[20]Bazerque JA,Giannakis G B.Distributed Spectrum Sensing for Cognitive Radio Networks by Exploiting Sparsity[J].IEEE Transactions on Signal Processing,2010,58(3):1847-1862.
[21]Bazerque J A,Giannakis G B.Group-Lasso on Splines for Spectrum Cartography[J].IEEE Transactions on Signal Processing,2011,59(10):4648-4663.
[22]Ling Q,Wen Z W,Yin W T.Decentralized Jointly Sparse Optim ization by Reweighted lqM inim ization[J].IEEE Transactions on Signal Processing,2013,61(5):1165-1170.
[23]Tian Z,Tafesse Y,Sadler B M.CyclicFeature Detection with Sub-Nyquist Sampling for W ideband Spectrum Sensing[J]. IEEE Journal of Selected Topics Signal Processing,2012,6(1): 58-69.
[24]Zhou L,Man H.W ide-Band Spectrum Sensing Using Neighbor Orthogonal Matching Pursuit[C].IEEE Sarnoff Symposium (SARNOFF),Newark,NJ,USA,2012:1-5.
[25]Qi C H,Yue G S,Wu L N,et al.Pilot Design for Sparse Channel Estimation in OFDM-Based Cognitive Radio System[J].IEEE Transactions on Vehicular Technology,2014,63 (2):982-987.
[26]Wang Y,Tian Z,Feng C Y.Sparsity Order Estimation and Its Application in Compressive Spectrum Sensing for Cognitive Radios[J].IEEE Transactions on Wireless Communications,2012,11(6):2116-2125.
[27]Hong S.Direct Spectrum Sensing from Compressed Measurements[C].M ilitary Communications Conference,San Jose,CA,USA,2010:284-289.
[28]Huang D T,Wu SH,Wang PH.Cooperative Spectrum Sensing and Locationing:a Sparse Bayesian Learning Approach[C]. Global Telecommunications Conference,M iam i,FL,USA,2010:1-5.
[29]Li X,Hong S,Zhu H,et al.Bayesian Compressed Sensing Based Dynamic Joint Spectrum Sensing and Primary User Localization for Dynam ic Spectrum Access[C].Global Telecommunications Conference,Houston,TX,USA,2011:1-5.
[30]Friedman J,Hastie T,Höfling H,et al.Pathwise Coordinate Optimization[J].Annals of Applied Statistics,2007,1(2): 302-332.
TN929.3
A
1672-5220(2015)04-0523-07
annel energy vector of the
signal x(j)(t)at the j th SU,Eq. (7)can be w ritten in the vector form as:
Received date:2014-03-04
s:National Natural Science Foundations of China(Nos.60872073,51075068,60975017,61301219);Doctoral Fund of M inistry of Education,China(No.20110092130004)
*Correspondence should be addressed to ZUO Jia-kuo,E-mail:zuojiakuo85418@163.com
杂志排行
Journal of Donghua University(English Edition)的其它文章
- Numerical Reality Method of the M icroburst Model
- Corporate Governance,Government Regulation and Bank Stability
- Cracking Patterns of Shear Walls in Reinforced Concrete Structure due to Strong Earthquake Based on Mohr-Coulomb Criterion
- Numerical Simulation of Gas-Solid Two-Phase Flow in Reverse Blow ing Pickup Mouth
- Fuzzy Model Free Adaptive Control for Rotor Blade Full-Scale Static Testing
- Bottleneck Identification and Prediction of Wafer Fabrication Systems in Transient States