基于事件驱动的城市交通信号控制实例研究
2015-08-02王大珊王松浩赵玉娟饶众博
王大珊,王松浩,赵玉娟,饶众博
(公安部道路交通安全研究中心)
1 研究背景
在当今的城市交通系统管理中,信号控制是一个核心问题。当前,国内使用的交通信号控制系统大多数是从国外引进的。以北京为例,现使用中的交通信号机主要包括:SCOOT 系统的T700、T800、MCU-6 信号机;ACTRA 系统的2070 信号机。而从其信号机的数量及在北京的分布区域来看,北京市使用的信号机系统主要为SCOOT 系统和ACTRA 系统。
但是,理论研究中的诸多控制算法却在实际应用一直存在一定的障碍。就北京目前使用的交通信号机而言,如果需要更新控制算法,则必须对每台信号机的控制程序进行修改及现场程序下载工作。这种模式工作量繁重,效率低下、可靠性差且较难保证更新周期。无法适应不断发展的交通信号控制策略及需求。
本文设计开发了一种交通信号机转接器,其中转接器通过交换机介入信号机网络,获取各个路口信号机及控制中心相关数据,同时转接器本身充当基于事件调度的交通信号发放平台,从而在现有信号控制系统基础上实现平台的实时仿真。在该交通信号控制平台基础上,本文设计一种有效地需求响应数据流。该结构可以实现方案切换、固定配时、感应控制、干线协调、车辆优先、极端状态处理、车辆强制优先等多种常见控制需求。将本文开发的系统用于实际道路中,实现了感应控制功能和干线协调控制功能。
2 接入模式
为检测该系统的实际运行效果,本文设计开发一种交通信号机转接器。该转接器通过交换机介入信号机网络,获取信号机及控制中心相关数据,同时转接器本身实现基于事件调度的交通信号发放平台,从而在现有信号控制系统基础上实现平台的实时仿真系统。
结合北京市交通流特点及信号机分布情况,选取景山公园地区的6 台信号机作为测试。如图1 所示。其中,数字1 ~6 表示六个测试路口,每个路口各有一台信号机;字母a、b、c、d 等表示该路口的相位。路口6 东西方向有独立的左转相位,用a-2、b-2 表示。
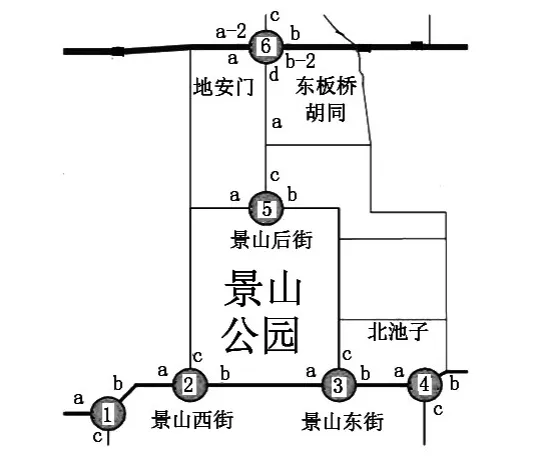
图1 测试区域
景山公园地区位于北京市二环以内,是商业旅游的中心。该区域信号机先采用多种形式的控制模式以满足交通需求的不断变化。目前,路口1 ~4 使用干线协调控制模式;路口5 使用感应控制模式;路口6 东西方向提供基于固定配时的公交优先控制策略。
下面通过设计解析器规则,在转接器上实现上述区域的交通信号控制策略在线仿真。
3 解析器设计
在该交通信号控制平台基础上,本文设计一种有效地Request 数据流。该结构可以实现方案切换、固定配时、感应控制、干线协调、车辆优先、极端状态处理、车辆强制优先等多种常见控制需求。
该设计中使用了系统提供了两类优先区域,由系统结构可知,任何请求均受到安全约束及冲突约束、过渡时间约束和最小绿约束;紧急相位请求不受相位最大绿约束,包括紧急请求(Preemption)、特殊状态请求(Special Status)、相位存在(跳过)请求(Presence);一般相位请求受请求相位最大绿约束限制,包括车辆优先请求Priority、协调请求Coordination、感应请求Actuation;方案修正请求包括方案参数修改请求和方案更换请求两类
在上述解析规则下,该信号控制平台可以有效地实现感应控制、感谢协调控制、紧急车辆请求和优先车辆请求等基础功能。同时在该信号控制结构为其他智能控制算法提供有效地移植平台。将该解析规则集在景山公园区域转接器中实现,通过定义不同的事件,得到有效地实时在线仿真系统,下面从不同控制需求阐述具体事件定义及解析规则参数设计。
4 景山区域信号控制功能实现
4.1 感应控制路口-5
路口5 为典型3 相位两阶段控制方案,每个相位各有一个停止线检测器和远端绿延时检测器。如图2 所示。
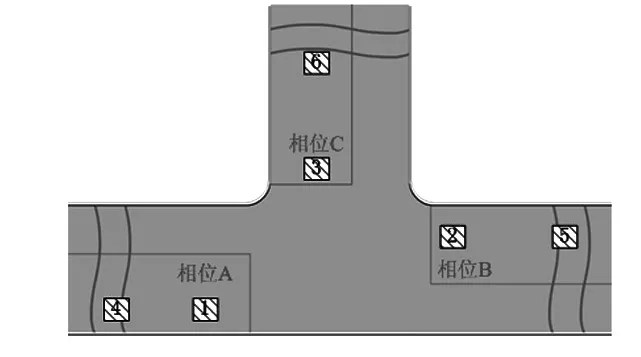
图2 路口5 相位及检测器示意图
该路口的感应控制可通过定义两类Request 得以实现。6 个检测器均作为IO 信号输入,检测器高电平分别定义八个事件,停止线检测器事件解析为Presence 请求,而远端检测器解析为Actuation 请求。
Presence 类数据定义如下,其中i =1,2,3 表示1 ~3 号检测器。

两类请求在Dispatcher 内有调度机制决定是否存在相位申请或者绿延时申请并调整执行状态。这样即可实现一般感应控制。而通过修改Request(Presence)生成规则,生成请求为是否跳过某相位,则可将其变为主干道长期获得通行权,辅道申请获得通行权的模式。
4.2 公交优先路口-6
路口6 实现东西方向上的公交车辆优先功能。该路口时8 相位三阶段的控制方案。东西向由独立的左转相位,在东西入口方向上假设有公交车辆RFID 检测设备,以检测公交车辆的到达时刻。
紧急请求通过Request(Preemption)实现了车辆优先请求通过Request(Priority)实现。这个实现原理类似,但对应优先级不同。
根据路口公交优先需求,定义4 类事件,其中i=1,2,3,4 分别对应a,a-2,b,b-2 的公交车辆。

对应的解析规则可表示为

5 总 结
为解决在城市交通信号控制研究方面,理论与现实脱节的现象,本文基于事件驱动模型,开发了一个新型交通信号控制系统,并设计了转接器、解析器。将其用于实际道路中,实现了感应控制功能和干线协调控制功能
[1]刘景梅.交通灯的模糊控制器设计[J].中国科技博览,2014,(27):30.
[2]徐磊,彭金栓.基于卡尔曼滤波理论的实时交通信号控制研究[J].科学技术与工程,2014,(26).
[3]娄月新.交通信号灯的设计与实现[J].电脑知识与技术,2014,(22).
[4]杜鹏.浅议电子信息技术在交通信号灯控制上的应用[J].消费电子,2014,(18).
[5]王华,蔡延光.基于混沌遗传算法的干线交叉口信号控制优化研究[J].电子世界,2014,(18).
[6]刘丽娟.智能交通信号控制系统及相关问题研究[J].消费电子,2014,(18).
[7]吴小红.基于8051 单片机的智能交通信号灯的设计与实现[J].电子世界,2014,(16).
[8]张小伟.基于云控制器在智能交通信号灯控制中的应用研究[J].消费电子,2014,(16).
[9]李靖博.路段监控设施在高速紧急避险车道的应用[J].山西建筑,2014,40(15).
[10]冯艳平,范其丽.单片机技术在轨道交通信号系统中的应用[J].魅力中国,2014,(15).
