改进的GNSS/INS列车组合定位PF算法❋
2015-08-02王更生
王更生,张 翔
(华东交通大学信息工程学院,南昌330013)
改进的GNSS/INS列车组合定位PF算法❋
王更生,张 翔
(华东交通大学信息工程学院,南昌330013)
针对列车组合定位融合估计的非线性问题,结合GNSS/INS(Global Navigation Satellite System/Inertial Navigation System)列车组合定位当前发展的方向,给出了一般无迹粒子滤波(UPF)的基本过程。针对传统PF(Particle Filter)缺乏量测信息且计算量大而难以应用于GNSS/INS组合导航中的问题,提出一种新的IUPF(Iterative Unscented Particle Filter)算法。它通过将IKF(Iterative Kalman Filter)的思想融入UKF(Unscented Kalman Filter),得到比较健壮的迭代无迹Kalman滤波(IUKF),由IUKF(Iterative Unscented Kalman Filter)产生的分布与真实的后验分布有更大的支撑重叠区域,提高了精度。并且运用全局采样到PF中,结合当前最新观测值对粒子集整体采用一次IUKF来产生建议性分布,减少了计算量。仿真模拟结果表明,IUPF与一般的UPF、PF相比,精度更高,算法计算量更小。
列车组合定位;GNSS/INS组合系统;PF滤波;迭代无迹粒子滤波;全局采样;建议性分布
1 引 言
基于GNSS与INS等传感器融合构成的列车组合定位系统,能够有效提高整个系统的容错能力、位置信息可信度以及时间和空间覆盖范围,是当前列车测速定位技术的重要发展方向。在GNSS/INS列车组合定位过程中,很重要的一步就是多个传感器的信息融合,传统的做法广泛采用卡尔曼滤波方案。后来提出的EKF(Extended Kalman Filter)及UKF等又因为各自模型的限制,无法精确描述系统模型,很难适用于组合导航中强非线性、非高斯的滤波环境。粒子滤波PF(Particle Filter)在处理非线性、非高斯时变系统的参数估计和状态滤波问题上具有独特优势[1],因此在GNSS/INS组合导航应用中有较大应用潜力。粒子滤波中建议分布选择的好坏决定着采样后粒子集分布是否合理[2],选择一个合适的建议分布,可以使粒子集在重要性采样后很好地覆盖状态的后验概率密度区域。将IKF的思想融入UKF,就可以得到比较健壮的迭代无迹Kalman滤波。由IUKF产生的分布与真实的后验分布有更大的支撑重叠区域,所以IUKF比UKF估计的更精确,并且运用全局采样到IUPF中,能够以较小的计算代价对GNSS/INS状态进行较高精度的估计。
2 传统UPF的基本原理
针对PF(Particle Filter)[3]无法很好地逼近后验概率的问题,Merwe等人提出使用UKF产生PF的重要性分布,称为Unscented粒子滤波器(UPF)。UKF产生的重要性分布与真实状态概率密度分布的支撑集重叠部分较大,估计精度更高。
UPF算法充分利用了系统模型并结合了最新观测值,使粒子状态更加接近样本真实的后验分布,可以有效抑制粒子的退化。但是,经过若干次循环后,只有个别粒子具有较大的权值,不能有效地表示后验分布,从而对状态的估计基本起不到作用。
3 基于全局采样的IUPF算法
进行PF及其扩展算法时,重要性密度函数的选择很重要。UKF是一种非常有效的非线性滤波方法,它利用状态方程和量测方程真实的非线性模型,然后选择一系列确切的sigma点去逼近概率密度函数。以往的研究表明,UPF在利用UKF算法对每个粒子产生建议分布时,包含最近的观测信息,可以比较接近后验概率密度函数,对滤波精度有很大提高[5]。但是传统的UPF在每一次滤波过程中都需要迭代N次UKF算法,分别去估计这N个粒子的均值和方差,然后以这N个高斯分布作为每个粒子的建议分布。如此一来,算法的计算量大大增加。

IUPF算法具体步骤如下:
步骤1:初始化

步骤2:计算粒子集的均值和方差
步骤3:利用IUKF预测和更新时刻粒子集的均值和方差
(1)扩展系统的状态向量

(3)时间更新
(4)量测更新

其中,zi,k|k-1表示zk|k-1的第i个列向量。
步骤4:重要性采样并计算重要性权值
(1)重要性采样

(2)计算重要性权值

并进行归一化处理。
步骤5:输出阶段
输出一组带权值的粒子,并得到相关的状态估计。
步骤6:循环控制
令k=k+1,若算法不结束就转到步骤2。
上述描述的IUPF,既有非线性分布统计量计算精度高的优点(UKF主要的优点),又能够比较精确地表达基于观测量和控制量的后验概率分布(PF的主要优点)。并且,在采样环节对粒子集整体进行采样,然后再融入IKF的思想到UKF中,对粒子集整体作一次IUKF算法,结合样本最新的观测值即可给出全局的建议分布。由IUKF产生的重要性分布与真实状态概率密度函数的支集重叠部分更大,估计精度更高。同时,在IUPF算法过程中,只需要用到上一时刻的粒子集均值和方差,再结合当前时刻的观测值,故省去了标准PF算法中重采样这一环节,从而也就改进了滤波效率。
4 IUPF算法仿真实现
在采集和谐号列控系统的样本数据后,设置以下仿真条件并用Matlab R2010b仿真实验:
(1)陀螺随机常值飘移为[0.01,0.01,0.01]rad/h;
(2)陀螺一阶马尔卡夫飘移为[0.000001,0.000001,0.000001]rad/h;
(3)加速度计一阶马尔卡夫飘移为[0.0001,0.000001,0.000001]g;
(4)陀螺一阶马尔卡夫相关时间为400s;
(5)加速度计一阶马尔卡夫相关时间为600s;
(6)GPS数据刷新率为1Hz;
(7)GPS状态误差为0.05rad;
(8)GPS速度误差为5m/s;
(9)GPS位置误差为:水平15m,天向15m。
利用以上仿真条件,分别对同一组样本数据采用传统的UPF算法和改进的IUPF算法进行GNSS/INS列车组合定位系统的仿真验证。图1-图3即UPF和IUPF滤波分别应用在GNSS/INS列车组合定位系统上,东向、北向和天向3个方向的位置误差。从图中可以看出:采用UPF算法得到的列车位置误差基本上在[-4,4m]区间,而采用IUPF算法得到的位置误差降低在[-1,1m]区间上。该算法使GNSS/INS列车组合定位系统的精确性得到了极大提高,为列车的科学调度和安全运行提供技术支撑[9]。图4为在不同粒子数下一次迭代滤波的平均时间,实验结果表明IUPF滤波时间比传统的UPF明显少。表1列出了传统UPF和IUPF两种算法的性能对比。
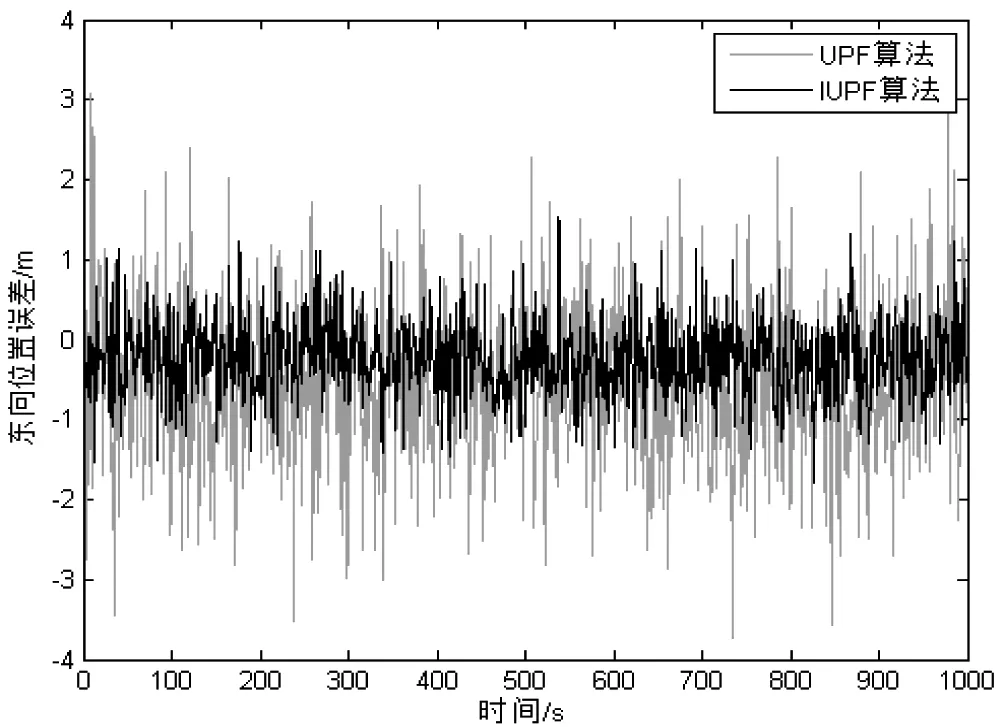
图1 UPF和IUPF东向位置误差

表1 UPF和IUPF算法性能比较
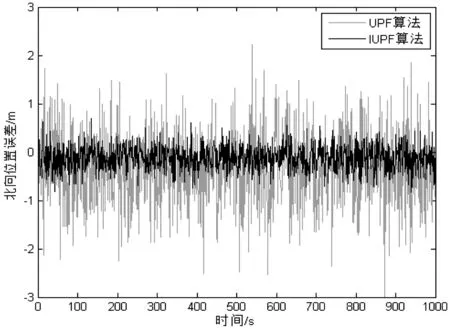
图2 UPF和IUPF北向位置误差
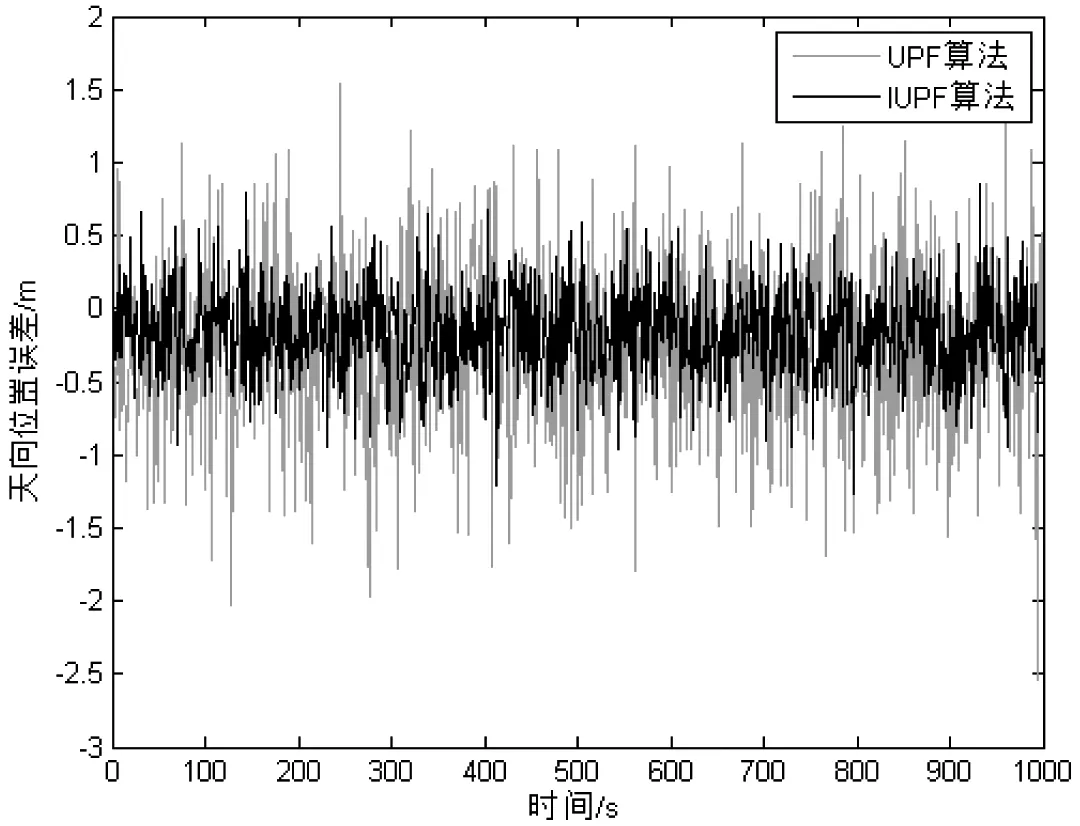
图3 UPF和IUPF天向位置误差

图4 单步滤波时间
5 结束语
在IUKF和PF的基础上,引入基于IUKF设计重要性密度函数的全局采样IUPF算法,结合两者优点,又加入新的采样环节。与传统UPF相比算法效率提高不少,在GNSS/INS列车组合定位系统的定位精确性上有了很大增加,具有重要的工程实用价值。
[1] 刘先省,胡振涛,金勇.基于粒子优化的多模型粒子滤波算法[J].电子学报,2010,38(2):301-307.
Liu Xiansheng,Hu Zhentao,Jin Yong.Multiple model particle filter algorithm based on particle swarm optimization[J].Chinese Journal of Electronics,2010,38(2):301-307.
[2] Wang Fasheng,Lin Yuejin.Improving particle filterwith a new sampling strategy[C].//Proceedings of the 4th International Conference on Computer Science&Education,Nanning,China:National Research Council of Computer Education in Colleges&Universities 2009:407-412.
[3] 胡士强,敬忠良.粒子滤波原理及应用[M].北京:科学出版社,2010.
Hu Shiqiang,Jing Zhongliang.The principle and application of particle filter[M].Beijing:Science Press,2010.
[4] 王旭阳,王志勇.一种自适应免疫优化的无迹粒子滤波器[J].计算机工程与应用,2013:49(4):231-235.
Wang Xuyang,Wang Zhiyong.An adaptive immune optimization unscented particle filter[J].Computer engineering and applications,2013:49(4):231-235.
[5] Julier SJ,Uhlmann JK.Unscented filtering and nonlinear estimation[J].Proceedings of the IEEE,2004,92(3):401-422.
[6] 席志红,付存利.一种基于UPF.的改进粒子滤波算法[J].计算机仿真,2014,31(2):336-339.
Xi Zhihong,Fu Cunli.An improved particle filter algorithm based on UPF[J].Computer simulation,2014,31(2):336-339.
[7] 詹武平,肖同林,吴艳琴.改进的迭代粒子滤波法在GPS数据处理中的应用[J].遥测遥感,2011,32(2):39-43.
Zhan Wuping,Xiao Lin,Wu Yanqin.Application of iterative method of improved particle filter in GPS data processing[J].Remote sensing,2011,32(2):39-43.
[8] 郭文艳,韩崇昭,雷明.迭代无迹Kalman粒子滤波的建议分布[J].清华大学学报(自然科学版),2007,47(S2):1866-1869.
Guo Wenyan,Han Chongzhao,Lei Ming.The proposal distribution iterated unscented particle filter Kalman[J].Journal of Tsinghua University(NATURAL SCIENCE EDITION),2007,47(S2):1866-1869.
[9] 董健康,安东.自适应卡尔曼滤波在组合定位中的应用研究[J].计算机技术与发展,2011,21(10):11-14.
Dong Jiankang,An dong.Study on Application of[J].Technology and development in integrated positioning in adaptive Kalman filter,2011,21(10):11-14.
Im proved Algorithm of PF for GNSS/INS Integrated Train Positioning
Wang Gengsheng,Zhang Xiang
(College of Information,East China Jiao Tong University,Nanchang 330013,China)
Aiming at the fusion estimation problems of nonlinearity in integrated train positioning,combining with GNSS/INS(Global Navigation Satellite System/Inertial Navigation System)of the current development of integrated train positioning direction,the basic process of the unscented particle filter(UPF)is given in this paper.The traditional PF(Particle Filter)is lack ofmeasurement information and the amount of calculation is large and difficult to be applied to GNSS/INS integrated navigation,so a new IUPF(iteration unscented particle filter)is proposed.It integrates IKF(Iterative Kalman Filter)thought into UKF(Unscented Kalman Filter)to get the comparison robust IUKF(iterative unscented Kalman filter),the distribution generated by the IUKF to the true posterior distribution with support overlap area larger,and improves the accuracy.By using a global sampling to PF,the overall use of an IUKF on the particle set,combiningwith the new observation to generate the proposal distribution,reduces the amount of calculation.The simulation results show that the proposed algorithm,comparing with the ordinary UPF and PF,has higher accuracy and less calculation algorithm.
Integrated positioning;GNSS/INSgroup system;Particle Filter(PF);Iteration unscented particle filter(IUPF);Global sampling;Proposal distribution
10.3969/j.issn.1002-2279.2015.06.011
TP13
A
1002-2279(2015)06-0040-04
国家自然科学基金资助项目(61461019)
王更生(1964-),男,湖南人,教授,主研方向:计算机应用,全球卫星定位系统,数据挖掘。
张翔(1990-),男,湖北省孝感市人,硕士研究生在读,主研方向:全球卫星定位系统,计算机应用。
2015-03-12
