基于“PC+CPLD”的激光雕刻机教学实验平台设计
2015-07-31吴一川张为昭
吴一川,张 辉,李 方,张 翔,孙 思,张为昭
(1. 清华大学 机械工程系,北京 100084;2. 清华大学 北京市重点实验室,北京 100084;3. 清华大学 汽车工程系,北京 100084)
基于“PC+CPLD”的激光雕刻机教学实验平台设计
吴一川1,2,张 辉1,2,李 方1,2,张 翔1,2,孙 思3,张为昭1,2
(1. 清华大学 机械工程系,北京 100084;2. 清华大学 北京市重点实验室,北京 100084;3. 清华大学 汽车工程系,北京 100084)
为了使学生更好地掌握数控技术方面的知识,设计了一套基于运动控制板卡的综合实验系统。整个系统采用PC机作为人机交互界面和算法处理单元,以CPLD作为底层运动控制主芯片,实现从PC端到机电端的数字运动控制。实践表明,该系统有效地锻炼了学生理论结合实践的能力,为数控实验教学提供了良好的平台。
数控教学;激光雕刻机;运动控制卡;CPLD
数控技术是机械加工现代化的重要基础与关键技术[1],为了能够帮助相关专业学生掌握数控系统的工作原理,增加学生数控技术方法的实践经验,许多院校都自行开发了数控教学实验平台。文献[2]建立了基于网络交互的数控机床综合教学平台,文献[3]构建了基于FANUC数控系统的网络化实验教学平台,文献[4]搭建了基于PC机的数控实验系统,前三者侧重点在于让学生学习和了解G代码。近年来,以我们自主研制的激光雕刻机为实验平台的机械创新设计作为清华大学机械制造及自动化专业的一门重要的专业课程,越来越受到学生的欢迎。
在教学用激光雕刻机控制系统中,控制器可以采用“PC+高速运动控制卡”或“DSP+FPGA”构成,两者虽然性能较好,但是对于教学来说工作量大、成本高、开发周期长并且控制复杂[5-6]。为此,综合考虑教学需求,本文给出了“PC+CPLD”的控制方案,构建了新的雕刻机系统。
1 系统整体设计
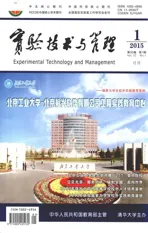
基于PC+CPLD的综合实验系统的整体如图1所示,数控系统主要由5部分组成:上位机PC、下位机CPLD运动控制卡、激光器、电机驱动器及伺服电机和机械执行机构。PC机作为人机交互界面和算法处理单元,向CPLD运动控制卡发送数据使其产生相应的控制信号,控制激光器并通过驱动器控制电机,经机械执行机构实现机电端的数字运动控制。
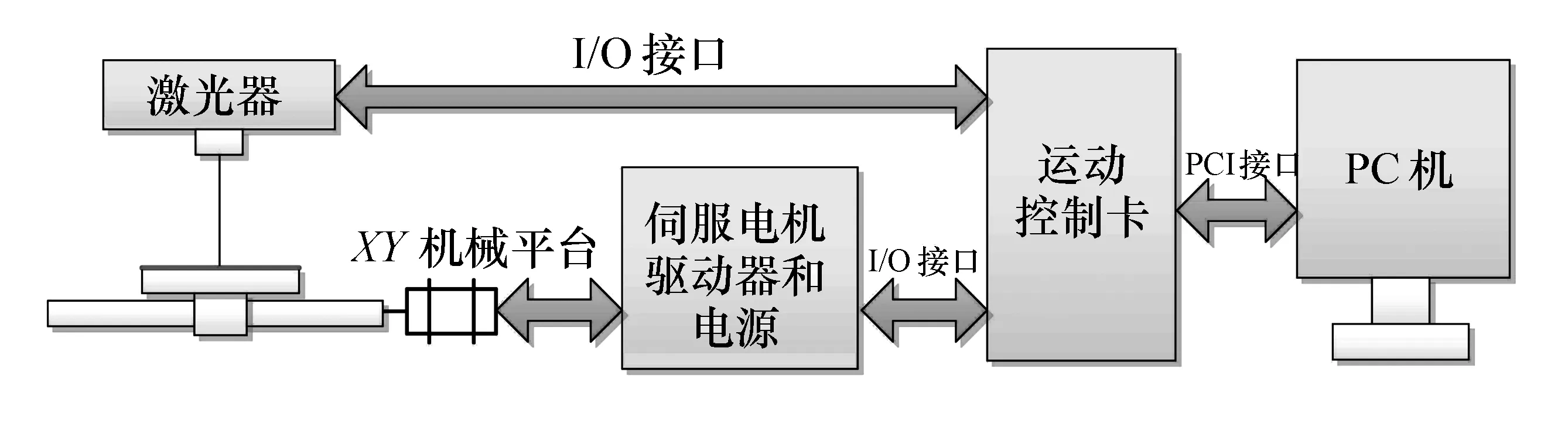
图1 系统整体示意图
2 上位机控制
2.1 插补算法
本实验机械工作平台只有X、Y,需要直线和圆弧插补器来实现或逼近各种各样的加工轨迹。插补器既可以由硬件电路实现,也可以由计算机软件实现,即分为硬件插补器和软件插补器[7-8]。对于硬件插补器,其逻辑电路结构比较复杂,所需的元件较多,造价高,但可靠性差[9];对于软件插补器,则完全借助于计算机编程指令来完成插补运算,不必改动硬件,根据插补公式采用不同的插补程序就能获得不同的插补功能,也可以插补椭圆、抛物线等比较复杂的函数曲线,学生更容易操作和学习,使教学具有较高的灵活性。
为帮助学生理解数控插补算法,本实验系统提供了利用计算机编程的逐点比较法。采用此方法既能加工直线轮廓,又能加工圆弧曲线轨迹,简化算法程序。直线插补的流程图如图2所示,其中Xe和Ye分别代表加工终点相对于起始点的横纵坐标,n总步数。学生可根据需要,自行编写其他的插补算法,最终通过观察加工轨迹终点的准确性和轨迹跟踪误差等,比较不同插补算法的优缺点。
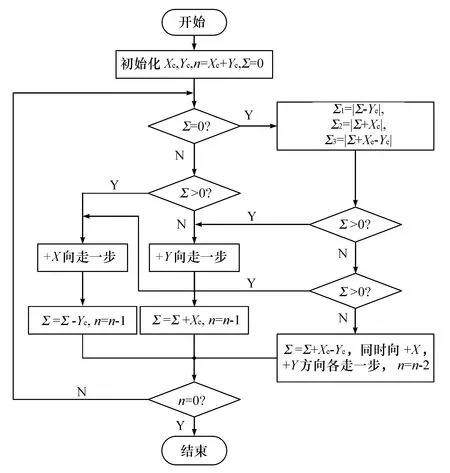
图2 直线逐点比较法算法流程图
2.2 编译环境和人机交互界面
实验所用的软件开发环境是VC++6.0,采用C语言编程。向学生提供软硬件接口,由MFC生成的人机交互界面包含4个按钮、2个静态文本框和1个编辑文本框,如表1所示。在实验中,要求学生在按钮控件背后添加功能函数,静态文本框里的参数设置成电机速度和激光强度,编辑文本框里用以命名工程,以便保存。
表1 软硬件接口
3 下位机控制
3.1 主控芯片
下位机主控制芯片选用的是可编程逻辑器件,该系统既可以通过FPGA,也可以通过CPLD来实现功能,两者均具有系统体积小、实时性强和能同步控制多路并行信号的特点[10]。为使系统的构建简单方便,本设计选择无需附加专门的数据重载器和相关电路的CPLD作为主控芯片。可编程器件CPLD采用乘积项技术,内含多个可以实现“与”、“或”功能的逻辑宏单元,在编程烧录以后通过可编程连线阵列将宏单元连接,采用逻辑关系乘积及求和的方式组成逻辑,完成所需功能[11]。在Quartus Ⅱ编译环境中采取硬件描述语言Verilog HDL编写程序,编译通过后,生成RTL级图,RTL级图表达了CPLD内部实际的各种门电路、触发器和各个管脚的逻辑组合情况[12-13]。因此每次对CPLD的编程烧录都相当于重新连接芯片内部的微小电路,改变了内部的硬件,获得一组符合工作要求的真实存在的逻辑电路,具有实时性强和能够同步控制信号的特点。
脉冲发送部分代码:
always @(posedge CLK) begin if(num >0) begin IRQ <= 1; if (clk_cnt1 == 1000) begin clk_cnt1 <= 0; if(pulse==1) begin pulse <=0; num <=num-1; pre_pulse <=1; end else begin pulse <=1; pre_pulse <=0; end end else begin pre_pulse <= pulse; clk_cnt1 <= clk_cnt1 +1; end end else begin IRQ <= 0; clk_cnt1 <=0; pulse <=0; end D[7] <= pulse & move_x; D[6] <= pulse & move_y;
if (num==0) D[3] <=0; end
3.2 数据解析
学生把规划好的轨迹用指令写入到上位机编译环境中,通过插补算法生成数据后将数据发送至下位机CPLD。CPLD解析数据并输出实时控制信号,信号经过驱动装置,使两轴机械平台配合激光工作,在工件上雕刻出轨迹。将经过上位机插补运算后的数据按照顺序排列成一个八位数组,通过中断响应来实现数据的传送过程,底层程序流程见图3。每当CPLD接收一个字节,则需要立即解析该数据,解析后由CPLD输出控制信号,使电机和激光配合加工,数据解析如图4所示。

图3 底层程序流程图
4 实验平台
学生了解整个系统后,自行搭建图5所示的实验平台。10 W的CO2激光器出束口距离加工平台上表面约为20 cm,做好后在上位机中输入规划的轨迹,执行加工操作。在激光出束过程中,注意自身安全。
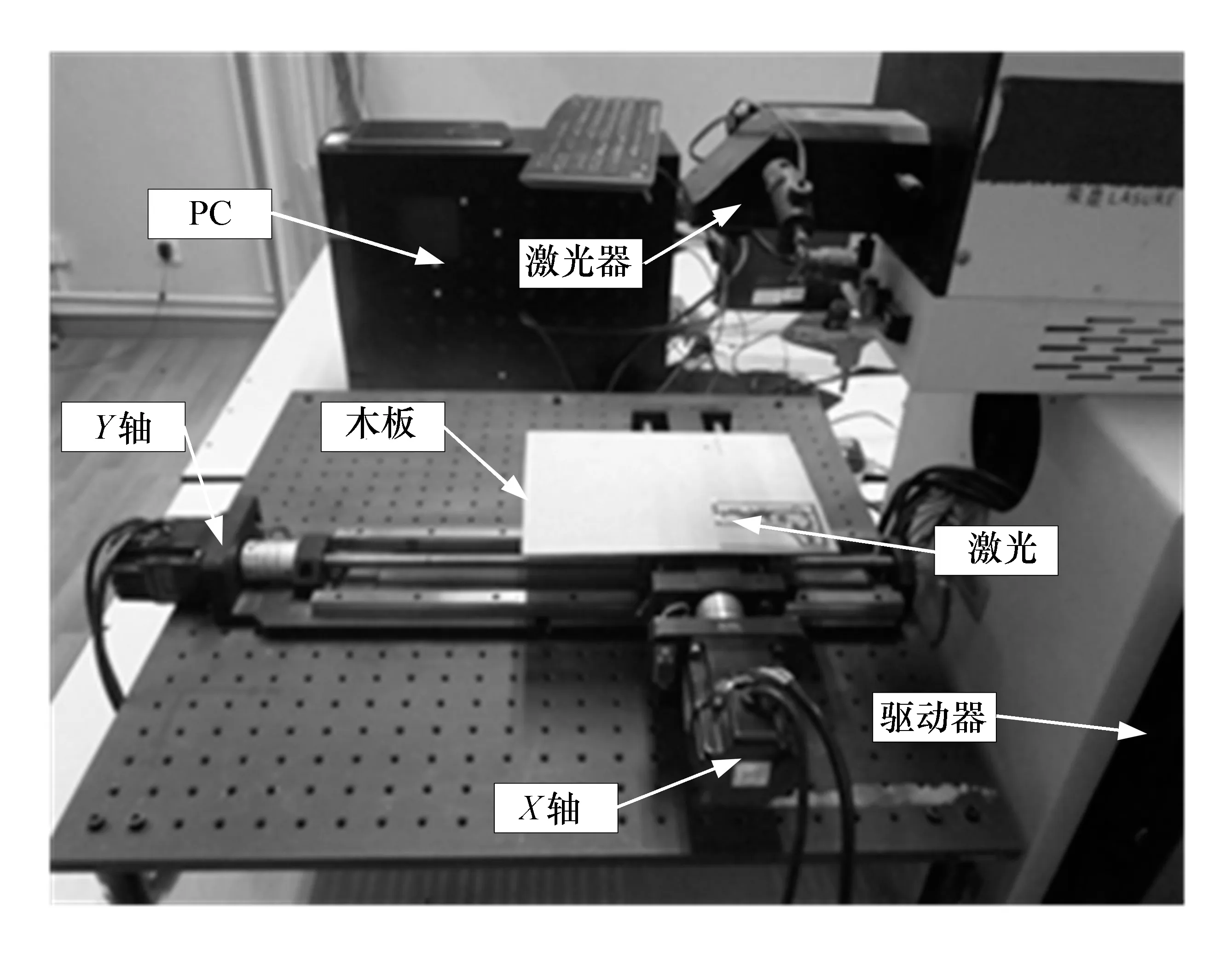
图5 实验平台
5 结论
本文设计了一套基于“PC+CPLD运动控制卡”结构的数控教学实验平台,完成了硬软件方面的搭建。系统成本较低,充分利用PC的人机界面方便用户使用及逻辑运算能力强的特点,依靠CPLD的高速、低成本、实时同步强和开发灵活的优势,为学生建立了优良的综合训练平台,达到了让学生深入理解数控系统的目的。
References)
[1] 李华志.数控加工工艺与装备[M].北京:清华大学出版社,2005.
[2] 徐海黎,王恒,朱志松.基于网络交互的数控机床综合教学平台设计[J].机械工程与自动化,2011(6):66-68.
[3] 徐学武,梅雪松,周玉清.基于FANUC数控系统的网络化实验教学平台构建及应用[J].实验技术与管理,2007,24(8):123-126.
[4] 于杰,樊锐.“数控技术”课程教学实验系统的研究与开发[J].华北航天工业学院学报,2004(1):20-23.
[5] 刘启中,蔡德福.现代数控技术及应用[M].北京:机械工业出版社,2007:51.
[6] 杨有君.数控技术[M].北京:机械工业出版社,2007:10-15.
[7] 闫励锋.运动控制技术研究及运动控制板卡开发[D].成都:四川大学,2001.
[8] 汤晓安,赫晓峰.PCI系统配置机制的研究与实现[J].计算机自动测量与控制,2000(2):1-3.
[9] 吴琳,谭营,唐建.运动控制技术发展与展望[J].机床与液压,2007,35(7):231-233.
[10] 刘爱荣,王振成,陈扬,等.EDA技术与CPLD/FPGA开发应用简明教程[M].北京:清华大学出版社,2013:15-20.
[11] 清华大学数控实验室.教学平台实验指导书[M].北京:清华大学出版社,2010:5-8.
[12] 宋万杰.CPLD技术及其应用[M].成都:电子科技大学出版社,1999:63-65,70.
[13] 刘捷.激光数控加工专用PCI总线运动控制卡研究[D].武汉:华中科技大学,2004.
Design of a teaching experimental platform of laser engraving machine based on “PC+CPLD”
Wu Yichuan1,2,Zhang Hui1,2,Li Fang1,2,Zhang Xiang1,2,Sun Si3,Zhang Weizhao1,2
(1. Department of Mechanical Engineering,Tsinghua University,Beijing 100084,China;2. Beijing Key Laboratory,Tsinghua University,Beijing 100084,China; 3. Department of Automotive Engineering,Tsinghua University,Beijing 100084,China)
Under the demand of the teaching background to make the students grasp the numerical control technology and knowledge better,a new set of motion control board hardware and software platform is designed. The whole system adopts the PC as a man-machine interface and algorithm processing unit,and the CPLD as the main underlying motion control chip,realizing motion control which is from PC to mechatronical terminal. Practice shows that the students’ ability to combine theory with practice is improved effectively,which provides a useful platform for the NC teaching.
numerical control teaching;laser engraving machine;motion control card;CPLD
2014- 05- 28
清华大学自主项目“数控立柱移动立式铣车床关键零部件的刚度保证技术研究重大专项”(2009ZX04002-021)
吴一川(1990—),男,四川自贡,硕士,主要研究方向为机械电子
E-mail:wu-yc13@mails.tsinghua.edu.cn
张辉(1969—),女,山东威海,博士,副研究员,主要研究方向为先进制造装备及自动化.
E-mail:wwjj@tsinghua.edu.cn
G484;TG665
A
1002-4956(2015)1- 0087- 04