商用车电动助力转向系统助力特性研究
2015-07-30陈建宏
陈建宏,张 硕
(1.福建船政交通职业学院 汽车运用工程系,福建 福州 350007;2.长安大学,陕西 西安 710064)
商用车电动助力转向系统助力特性研究
陈建宏1,张硕2
(1.福建船政交通职业学院 汽车运用工程系,福建 福州 350007;2.长安大学,陕西 西安 710064)
摘要:根据某商用车的结构、参数和试验数据,对商用车电动助力转向系统的布置、助力特性进行研究。设计方向盘转矩梯度曲线函数和速度梯度曲线函数,并确定电动助力转向系统的助力特性。运用TruckSim和Matlab/Simulink作为联合仿真平台,建立了装备电动助力转向系统的商用车联合仿真模型,对电动助力转向系统的助力特性以及对整车操纵稳定性的影响进行仿真研究,仿真分析表明所设计的助力特性可以有效提高商用车的转向轻便性和改善轨迹跟踪能力。
关键词:电动助力;转向系统;助力特性;操纵稳定性
电动助力转向系统(electric power steering system,简称EPS)是一项由电动机提供转向助力矩的汽车动力转向技术。与液压助力转向系统相比,具有可调助力特性,能有效提高转向助力的跟随性和降低燃油消耗等优势,已在乘用车领域得到了广泛的应用。商用车相对于乘用车而言在结构和性能上有很大区别,本文根据某商用车的结构、性能参数和试验数据,对商用车电动助力转向系统的布置、助力特性进行研究和设计,并通过TruckSim和Matlab/Simulink的联合仿真模型对EPS助力特性的合理性进行验证。
1 EPS的工作原理及总布置
电动助力转向系统主要由扭矩传感器、车速传感器、电子控制单元、助力电动机、电磁离合器、减速机构等组成。通过安装在转向轴位置的扭矩传感器测量出驾驶员操作转向盘的力矩大小信息,并将其传递给控制单元;控制单元根据转向盘输入力矩大小并结合车速传感器信息确定电动助力矩,控制助力电动机输出合适的扭矩大小和方向,由减速机构减速增扭后得到电动助力转向系统的助力矩,并将其作用在转向系统上,实现助力转向。电动助力转向系统可以实现汽车在低速行驶时转向轻便、高速行驶时操纵稳定。当出现车速过高或电动助力转向系统工作异常时,控制单元可控制电磁离合器断开,保证在纯手动驾驶情况下也可以安全准确地完成转向操作。
与乘用车相比,商用车具有汽车总质量大、质心位置高、转向桥载荷大、可布置空间大等特点。选用总质量为8 805 kg、转向前载荷为25 200 N的商用车,其转向器为循环球式转向器。考虑到转向轴助力式EPS具有结构紧凑、助力矩控制和方向盘输入转矩信号采集的响应特性较好以及对原商用车的转向系统结构改动小等优点,本文在EPS的布置方案中选用转向轴助力式EPS布置方案,具体布置如图1所示。

图1 商用车EPS的结构简图
2 EPS数学模型的建立
2.1EPS机械系统模型
本文选用转向轴助力式EPS布置形式,如图1所示,扭矩传感器把转向轴分为上部转向轴和下部转向轴,将EPS机械系统的运动和受力全部转换和简化到转向轴上进行分析,建立的EPS机械系统模型为:

在式(1)中,Th为方向盘输入力矩,Ta为转向轴助力矩,θ1为方向盘输入转角 (即上部转向轴转角),θ2为下部转向轴转角,J1为方向盘及上部转向轴的转动惯量,C1为转向管柱阻尼系数,J2为转向器及转向轮等效转化至下部转向轴后的转动惯量,C2为转向器及转向轮等效转化至下部转向轴后的阻尼系数,T2为等效转化至下部转向轴的转向阻力矩。
EPS的助力电动机选择为永磁无刷直流电动机。该电动机的电磁力矩与电枢电流成正比,即Tm=KmI,其中Km为电磁力矩常数。忽略电动机的扭转刚度以及转轴与支撑之间的干摩擦力,则建立的助力电动机模型为:
KmI=Ta/G+Jmθ¨m+Cmθ¨m(2)在式(2)中,θ¨m为助力电动机输出轴转角,G为涡轮蜗杆减速机构传动比,Jm为助力电动机的转动惯量,Cm为助力电动机的阻尼系数。
3 商用车EPS的助力特性
助力特性是指助力电动机提供的助力矩随汽车运动状况的变化规律[1]。在实际驾驶车辆的过程中,随车速的增加车辆具有转向轻便性越好而路感越差的特点,因此在设计EPS助力特性时,不仅要考虑方向盘输入力矩而且需要考虑车速因素。EPS助力特性应满足:(1)在低速时提供较大的助力矩,以实现车辆低速行驶的轻便行驶,高速时提供的助力矩应较小或为零,以保证转向时具有一定的路感。(2)助力矩应与方向盘输入力矩的变化趋势一致,且为了保持较好的转向路感,当方向盘输入力矩低于某一阈值时,助力电动机提供的助力矩应较小或为零;为了使转向轻便,助力电动机提供的助力矩应随着方向盘输入力矩的增加而增加。(3)助力电动机提供的助力矩应具有最大限值,以避免助力电动机因负荷过大而出现故障。
根据上述设计要求,本文基于电动机的电枢电流控制方法设计商用车EPS的助力特性,通过电枢电流与方向盘输入力矩和车速之间的变化关系曲线来表示助力特性,该关系曲线称为助力特性曲线。助力特性曲线通常包含无助力区间、助力变化区间和助力恒定区间。根据在助力变化区间的电枢电流与方向盘输入力矩的关系特点,可以将助力特性曲线分为直线型、折线型和曲线型三种典型类型。从性能角度分析,直线型助力特性曲线的设计简单、数据量小易于存储,具有固定的助力增益,对于转向轻便和路感的调整效果较差;曲线型助力特性曲线具有平缓的过度线形和非线性助力增益,能够很好的调整行驶过程中转向轻便性和路感之间的关系,但设计复杂、调整不方便;折线型助力特性曲线的各项性能介于两者之间。从适用车型角度考虑,直线型助力特性曲线适合应用于前轴载荷较小的车型,曲线型助力特性曲线适合应用于前轴载荷较大的车型,而折线型助力特性曲线则介于两者之间[2]。根据所选商用车型特点,本文选用曲线型助力特性,并结合该商用车的试验数据确定曲线型助力特性。
3.1方向盘转矩梯度曲线
蒙古族的整个篇章中,也基本是在一个固定的场景里——蒙古包,此处用逆光位置上的传统成像切割灯,将蒙古包中的八个坐席用光斑切割出长方形来拼成“八”字,一是将演区突出,二是从视觉的角度上,用长方形拼合而成的“八”字形刚好形成了一个室内场景的区域,让观众一看到此场景立刻就能有一种身临其境被包裹在其中的感觉。随着篇章的进行,“八”字形区域时而强调时而弱化,在情节以及时间转换上都很好地起到了锦上添花的作用。
方向盘转矩梯度曲线用于描述助力矩与方向盘输入转角之间的关系。它应具有最小和最大助力矩,在曲线部分,助力矩应随方向盘输入力矩增大而增加,且增加的速度也应相应加快(即曲线斜率应随之增大)。方向盘转矩梯度曲线具体设计如下:
(1)Tho和Thmax的选取
Tho为助力电动机提供助力矩时的最小方向盘输入力矩,Thmax为助力电动机提供最大助力矩时的最小方向盘输入力矩。Tho和Thmax的选取应考虑驾驶员对转向轻便性和路感的要求并通过试验来确定[3],这里初步取选取Tho=2.0 N·m,Thmax=30 N·m。
(2)最大助力矩Tm max的选取
根据汽车动力学原理,汽车在原地转向时转向阻力最大,其计算公式为[4]:

在式(3)中,为转向轮轴负荷,所选商用车为前桥转向系统,计算得Mi=25 200 N;p为轮胎气压,取值0.72MPa;为轮胎和路面的滑动摩擦因数,一般取0.7;s为安全系数,这里取1.1。由式(3)计算得原地转向时的转向阻力为1 193.6 N·m。
在无助力矩输入的情况下,原地转向时需要的方向盘输入力矩如式(4)所示。
T'h max=Tf max/(iωηω)(4)
式(4)中,iω为转向器角传动比;G涡轮蜗杆减速器传动比,G=21;ηω为循环球式转向器正效率。由式(4)计算得到在无助力矩情况下原地转向时的方向盘输入力矩为74.6 N·m。假设在EPS工作时,方向盘输入力矩最大值为30 N·m,则原地转向需要的最大助力矩Ta max应为44.6 N·m。
(3)实验数据拟合

图2 方向盘转矩梯度曲线
3.2速度梯度曲线
速度梯度曲线函数用于表示助力矩随着车速的变化特性,选择为速度梯度曲线的拟合函数[6]。通过对该商用车的试验数据进行拟合,确定和值分别为1.0069、0.026,速度梯度曲线如图3所示。
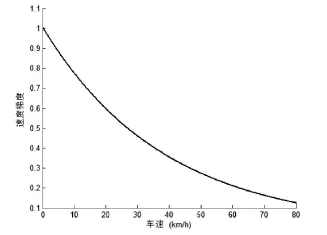
图3 速度梯度曲线
3.3助力特性曲线
根据上述方向盘转矩梯度曲线函数和速度梯度曲线函数,确定的曲线型助力特性的表达式如式(5)所示,它符合对EPS性能的三点要求,并充分反映助力电动机电枢电流与方向盘输入力矩和车速间的相互关系。

在式(5)中,I为助力电动机目标电流;Imax为助力电动机最大目标电流;ε为目标电流转换系数,ε= (GKmηm)-1,其中:ηm为涡轮蜗杆减速器效率。
4 装备EPS的商用车仿真研究
根据EPS的数学模型和助力特性,以方向盘输入力矩、左右前轮的转向阻力矩、车速为输入,以左右前轮的助力矩为输出,采用模糊PID控制方法,建立EPS的Matlab/Simulink仿真模型。应用TruckSim建立商用车的整车动力学模型,整车动力学模型以方向盘输入力矩、左右前轮的转向阻力矩和车速为输出并以左右前轮的助力矩为输入,与EPS仿真模型建立装备EPS的商用车联合仿真模型,如图4所示。

图4 装备EPS的商用车联合仿真模型
4.1转向轻便性仿真试验
EPS的主要功能是为驾驶员在转向时提供助力,使汽车在行驶过程中转向操纵轻便。根据GB/T 6323.5—1994规定的双纽线试验对装备EPS的商用车转向轻便性进行评估[7]。设定以10km/h的车速完成双纽线仿真试验,仿真结果如图5所示。

图5 方向盘输入力矩随方向盘转角的关系曲线
由图5可知,在车速10 km/h的双纽线试验中,装备EPS可使方向盘最大输入力矩由23.2 N/m减少至11.6 N/m,能够很好的改善车辆的转向轻便性。
4.3双移线仿真试验
由于EPS的助力矩对车辆原转向系统而言属于外部控制,助力矩对车辆的操纵稳定性的影响有待验证。本文采用根据ISO3888规定的双移线试验[8]对装备EPS的商用车操纵稳定性进行闭环仿真试验研究。双移线试验通常用于测试紧急换道时车辆的操纵稳定性,这里选择以70 km/h的车速进行双移线仿真试验。

图6 方向盘输入力矩曲线

图7 横摆角速度曲线
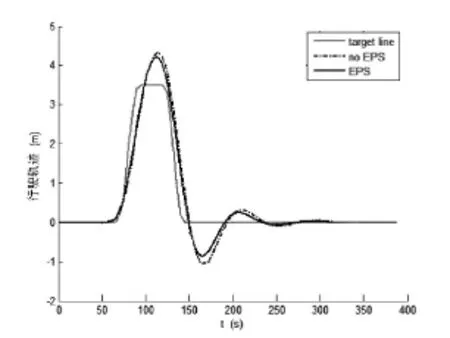
图8 车辆行驶轨迹
在双移线试验中需要大幅值的方向盘输入力矩进行急转向操作,由图6可知,装备EPS后,方向盘输入力矩的最大峰值由48.7 N/m减小到31.8 N/m,EPS可有效减小方向盘输入力矩,改善转向轻便性;如图7所示,EPS对车辆横摆角速度曲线的整体影响较小,可减小曲线的震荡幅值及缩短曲线的收敛时间;由图8可知,在EPS的作用下,双移线跟踪轨迹最大值偏移量减少了0.2 m,且跟踪轨迹的收敛性得到一定的改善,EPS能够提高车辆对双移线轨迹的跟踪能力。
5 结论
本文基于商用车的特点和试验数据,设计了EPS的曲线型助力特性,根据EPS的数学模型、助力特性和商用车参数建立了装备EPS的商用车辆联合仿真模型,仿真结果表明:装备EPS可有效减少方向盘输入力矩,改善了多种工况下的转向轻便性;对车辆闭环操纵的稳定性影响较小,在一定程度上可以改善了行驶稳定性;在改善转向轻便性的同时,可提高车辆的轨迹跟踪能力。
参考文献:
[1]刘照.汽车电动助力转向系统动力学分析与控制方法研究[D].武汉:华中科技大学,2004.
[2]施国标,林逸,邹常丰,等.电动助力转向系统匹配设计的研究[J].公路交通科技,2003,20(5):125-128.
[3]邓利军.EPS系统控制策略仿真研究[D].西安:长安大学,2008.
[4] 王望予.汽车设计[M].北京:机械工业出版社,2006:233-251.
[5]陈昆盛.EPS系统总体方案及控制方法研究[D].南京:南京理工大学,2006.
[6]王豪,许镇琳,张海华,等.电动转向系统助力特性研究[J].公路交通科技,2003,20(6):143-146.
[7]清华大学,长春汽车研究所.GB/T 6323.5—1994汽车操纵稳定性试验方法转向转向轻便性试验[S].北京:中国标准出版社,1994.
[8]国际标准化组织.乘用车几句改变车道的操纵用试验车道,第一部分:两车道变换.ISO3888-1-1999[S].北京:中国标准出版社,1999.
(责任编辑:叶丽娜)
中图分类号:U463.44
文献标识码:A
文章编号:1674-2109(2015)09-0038-05
收稿日期:2015-03-30
作者简介:陈建宏(1959-),男,汉族,副教授,主要研究方向:车辆工程。
Study on the Characteristic of Electric Power Steering System of Commercial Vehicle
CHEN Jianhong1,ZHANG Shuo2
(1.Department of Automobile Transpartion Engineering,Fujian Chuanzheng Communication College, Fuzhou,Fujian 350007;2.Changan University,Xian,Shanxi 710064)
Abstract:According to the structure,performance parameters and test data of a commercial vehicle,the arrangement and assist characteristic of electric power steering system is studied for commercial vehicle.On the basis of test data,the gradient curve functions of steering wheel torque and velocity are designed,and the assist characteristics of electric power steering system is determined.Co-simulation model of the commercial vehicle equipped with electric power steering system is established on the simulation platform of TruckSim and Matlab/Simulink.The assist characteristics of electric power steering system and its influence of the vehicle steering stability is studied via co-simulation model.The co-simulation results show that the assist characteristics can enhances steering handiness and improves trajectory tracking ability of commercial vehicle effectively.
Key words:electric power steering system;assist characteristics;handling stability
