基于Matlab/Simulink的模糊PID控制的异步电机矢量控制系统仿真
2015-07-29王翀仝永臣
王翀 仝永臣


摘 要:为改善因电机参数变化和负载波动等因素引起异步电机矢量控制系统性能变差的问题,研究设计了一种模糊自整定PID控制器。模糊控制器的量化因子、比例因子可以根据输入变量的大小调整,从而自动调整模糊控制规则。并在matlab/simulink上建立系统仿真模型进行了仿真试验验证,给出了试验波形及分析结果。仿真结果说明,该异步电机矢量控制系统动态和稳态性能都得到提高,而且具有很好的鲁棒性。
关键词:模糊自适应控制;矢量控制;PID;异步电机;matlab/simulink
0 引言
PID控制在动态控制过程中有过去、现在和将来的信息,可以通过参数设定将其配置做到最优,是交流电机驱动系统中最基本的控制形式,其应用广泛,PID控制在定常线性系统中能得到很好的控制效果,但是其在处理非线性、大滞后等复杂工业对象以及难以建立数学模型或者模型非常粗糙的工业系统时,难以到达预想的效果[1,2]。智能控制理论不依赖于控制对象数学模型的精确建立,可以很好的解决系统鲁棒性问题。但是大多数智能控制方法原理过于复杂或是附加条件过多,这些不利条件严重影响了它们的工程实用化进程。只有尽可能简单的控制方法才是工程应用中实用的控制方法[3]。通过分析,本文在传统PID基础上加入模糊自整定模块,充分利用传统PID控制控制简单有效的特点,还能实现控制过程PID参数模糊自整定,从而实现了最佳的控制效果,提高了系统的鲁棒性及自适应能力。
1 模糊PID控制系统基本原理
模糊PID控制器由一个常规的PID控制器和一个模糊自调整机构组成。其结构框图如图1所示。该系统一改传统PID控制器的固定参数Kp,Ki,Kd的控制策略,基于常规PID控制器,首先对输入量e和ec进行模糊化处理,再根据预设知识库中的控制规则进行模糊推理,最后对输出清晰化处理,实现对PID各参数的动态自整定, 使PID控制器对被控对象的控制效果达到最佳,使系统具有较强的鲁棒性[4]。
图1 模糊自整定PID控制结构框图
2 模糊PID控制器设计
2.1 PID参数模糊自整定的原则。
3 在异步电机矢量控制系统中的应用及Matlab仿真
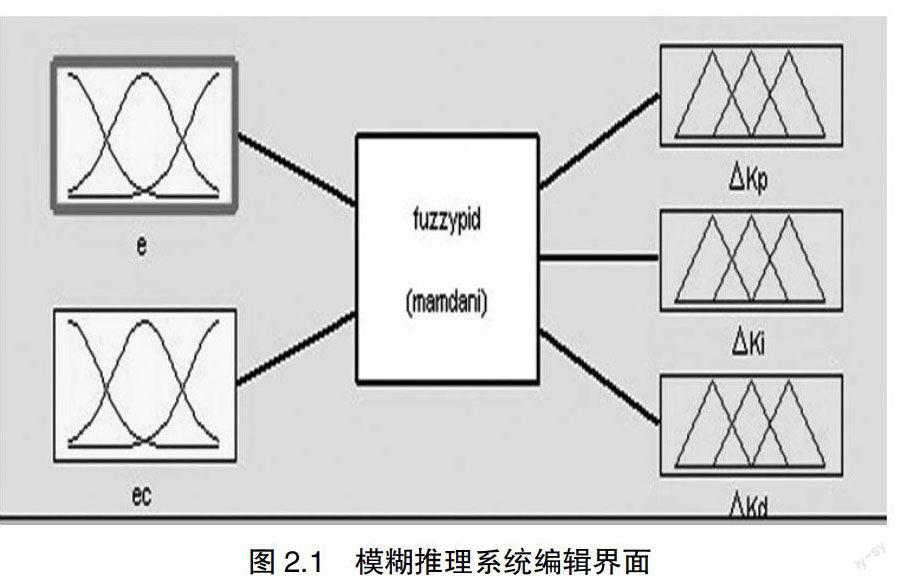
3.1 仿真模型的建立和算法实现。在Matlab中Simulink 环境下将模糊逻辑工具箱(fuzzy logic tool box) 与Matlab函数相结合对上面提出的PID模糊控制系统进行了仿真研究,推理方法采用工程上常用的Mamdani方法,利用“极大-极小”合成模糊规则,进行模糊运算[8,9]。根据表1,调节规则可以写成49条模糊条件语句。模糊规则编辑窗口如图3.1。
建立模糊推理规则后,可以通过操作查看规则图示或三维曲面图形(图3.2、3.3)。
ASR速度调节器的传统PID及自适应模糊PID控制模块如图3.4、图3.5所示。
图3.7为本文搭建的带转矩内环,转速、磁链闭环的矢量控制系统仿真模型[8],其中,主电路由直流电源DC、逆变器inverter、电动机AC motor和电动机测量模块组成,其中由电流滞环脉冲发生器模块产生逆变器的驱动信号,转子磁链观测器采用了两相旋转坐标系上的磁链模型,系统仿真模型还包括3s/2r及2r/3s转换模块、速度调节器、转矩调节器和磁链调节器。其中转速控制可切换为两种不同控制方式,即传统PID控制和模糊自整定PID控制。矢量控制调速系统仿真模型如图3.6、图3.7所示:
3.2 仿真结果与分析。分别在空载无扰动、空载加扰动、转速改变三种情况分别对系统传统PID和模糊自整定PID控制器进行了仿真实验,得到下列曲线。
空载无扰动的仿真结果如图3.8.1所示,由图中仿真曲线看出模糊自整定PID控制相比传统PID控制响应速度快、响应时间短,系统稳态性要好。
空载加扰动的仿真结果如图3.8.2所示,由图中仿真曲线看出,当系统负载波动时,模糊自整定PID控制相比传统PID控制响应速度快、超调量小、稳态性能更好。
转速改变的仿真结果如图3.8.3所示,由图中仿真曲线看出,当改变系统转速,对系统进行调速操作时,模糊自整定PID控制相比传统PID响应速度快、稳态性能更好。
4 结语
本文建立的模糊自整定PID控制器将模糊自适应控制应用到传统PID控制中。保留了传统PID控制器简单有效的优点,通过模糊自整定模块实时在线调整控制器的比例、积分、微分因子,克服了其在复杂非线性系统中控制性能差的缺点。仿真实验对模型进行了验证,也表明该新型控制器在响应速度、响应时间和稳定性上较传统PID控制有了很大提升,具有很好的实用价值。
参考文献:
[1]Rohrs CE, et.al.Robustness of Adaptive Control Algorithms in the Presence of Unmodelled Dynamics[C].Proc.21st IEEE Conf.Deci Contr.,Orlando, FL,1982.
[2]李永东.交流电机数字控制系统[M],北京:机械工业出版社,2002:21-35.
[3]杨立永,陈智刚,李正熙,赵仁涛.新型抗饱和PI控制器及其在异步电动机调速系统中的应用[J].电气传动,2009(5).
[4]韩瑞珍.PID控制器参数模糊自整定研究[D].杭州:浙江工业大学,2001.
[5]薛定宇.控制系统计算机辅助设计——MATLAB语言与应用[M].清华大学出版社,2006(03):372-383.
[6]刘明兰,孙立红,钟绍华,等.基于自调整因子Fuzzy规则的专家控制器[J].武汉:武汉汽车工业大学学报,1997(4):76-79.
[7]李大喜,王莉.模糊自適应PID控制在异步电机矢量控制系统中的应用研究[J].大电机技术,2008(6).
[8]高芳.模糊控制在异步电动机变频调速系统中的应用研究[D].西安科技大学,2012(06).
[9]周渊深.交流调速系统与MATLAB仿真[M].中国电力出版社,2005(04).
