基于差分技术的大坝表面变形监测研究
2015-07-28付淑娟
付淑娟
(邯郸市漳滏河灌溉供水管理处,河北 邯郸 056003)
基于差分技术的大坝表面变形监测研究
付淑娟
(邯郸市漳滏河灌溉供水管理处,河北 邯郸 056003)
【摘要】以大气环境等影响为前提,介绍了大坝表面变形监测系统的组成,探讨了系统差分测量的原理及精度。利用基准点的稳定性和基准网的已知信息,实现监测点的自动差分计算与平差处理,从而提高监测的观测精度。工程应用表明,监测系统合理,自动化程度高,测量精度达到亚毫米级。
【关键词】卧虎山水库;变形观测;TCA测量机器人;差分技术
卧虎山水库大坝全长985m,坝顶高程为139.5m,坝顶宽8.75m,最大坝高37m,大坝前坡为四级边坡,用干砌粗料石护砌。大坝后坡为三级边坡,植草皮护坡,坡比自下而上分别是1∶2.75、1∶2.5和1∶1.905。从坝体土料分布看,该坝体由亚黏土、砾质土、砂砾石、风化碎页岩以及块石这5类土组成。2010年大坝除险加固施工需对坝前清淤、坝后增高,即引起大坝抗滑力减小、滑动力增大,从而可能引起坝体整体滑动,影响大坝安全。为确保大坝在施工及运营期的安全,必须建立实时监测系统对坝体位移进行自动监测。
1 自动化极坐标监测系统的组成
1.1监测站
根据现场情况,监测站选在大坝的下游,该站由3部分构成,第一部分是建立在基岩上的仪器强制对中墩;第二部分是徕卡TCA2003全站仪,他具有自动目标识别的ATR功能,实现角度、距离的自动化测量;第三部分是对全站仪的防护、保温和防盗措施。
1.2基准点
在大坝两端的山顶各建立了2个稳定的基准点,每个基准点上配有一套正对监测站的单棱镜组,棱镜的强制对中装置均嵌入基岩内。监测站与基准点之间的已知距离、方位和高差是整个极坐标差分监测的基础,监测站至各基准点的方向和距离覆盖了整个变形监测区,对实时差分精度最为有利。
1.3变形监测点
监测变形点选在能表现大坝边坡变形情况的位置,本项目沿大坝轴线方向均匀选择了10个断面,每个断面自上而下设置了3个监测点,每个监测点需要建立混凝土观测墩,该观测墩距离地面约1m,整体现浇施工,顶部预埋可以安置棱镜的连接杆,外部半密闭金属棱镜保护罩。
1.4计算机控制平台
计算机控制平台一般位于办公区,控制平台与监测站房之间埋设专用电缆,实现机房中心计算机和监测站上全站仪之间的数据通讯。在控制机房内就能实时全面了解监测站全站仪的运行情况。另外,大坝表面监测系统软件由2部分构成,一部分是APSWin系统,他是徕卡公司在自动化全站仪 (TCA2003)的基础上提供的基于Windows开发的自动极坐标测量软件;另一部分是极坐标实时差分数据处理软件,他是基于观测数据处理、实时差分改正、平差计算和变形监测点信息输出报表综合应用软件。
2 极坐标差分测量原理
2.1监测点三维坐标和变形量计算公式
设监测站的三维坐标为(X0,Y0,Z0),按照极坐标计算公式可得到每周期各监测点的三维坐标:
若以监测点第1周期的坐标值 (X1,Y1,Z1)
P P P作为初始值,则各期监测点相对于第1周期的变形量为(ΔXPi,ΔYPi,ΔZPi),即
由式(1)可知引起观测值误差的主要因素是距离测量和角度测量,而在测量仪器精度(测距精度和测角精度)不变的情况下,影响距离和角度测量的主要因素是大气温度、湿度、风力、风向和大气折光等环境条件。如果能对这些影响因素加以修正,从而可提高监测点的三维坐标测量精度,得到更高精度的变形量。
2.2系统差分测量原理
2.2.1观测距离的差分改正
设监测站至某一基准点C的第1期测量斜距为dC1,在大坝变形观测过程中,第i期的实测斜距为dCi,两者之间的差异就可以认为是因大气环境条件变化引起的,则大气环境改正比例系数ΔdCi为:

通常情况下基准点应选取2~4个,并且均匀分布在变形监测点的四周,求得每一个基准点的比例系数后,取其中值作为整个变形监测区的大气环境改正比例系数Δdi。
若同一时刻测得某变形监测点的斜距d′i,
P则经过大气环境差分改正后的真实斜距为:

2.2.2球气差的改正
为准确地测量变形监测点的高程,在三角高程的单向测量中,必须考虑地球曲率和大气垂直折光对高差测量的影响,此影响称为球气差改正值c。c的确定通常是根据水准测量的高差和三角测量的高差之差来计算。设监测站与各基准点之间经过精密水准测量,求得各基准点的已知高差,若第i期测的监测站与基准点间的单向三角高差为hCi,则:

通过各基准点分别求得的改正系数ΔcCi值,取其中数作为一个测区的平均球气差改正系数Δci。在每周期变形监测过程中,由于观测时间较短,可以认为Δci值对基准点和变形监测点具有相等的影响,故同距离差分改正一样可按下式求得监测站与各变形监测点之间经球气差改正后的三角高差hi:
P

2.2.3方位角的差分改正
在长期的变形监测过程中,水平度盘零方向的变化和大气水平折光的影响,需要考虑水平方位角的差分改正。在变形监测中,所有的变形量都是相对第1周期而言的。故可以把基准点第一次测量的方位角αC1作为基准方位角。其他周期对基准点测量的方位角αCi与第1周期的方位角的差值为Δαi:
C

此差值对变形监测点的测量有同等的影响,故在监测点每周期的方位角观测值αP′i中,实时加入同期基准点求得的ΔαC改正值,即可准确求得监测点的方位角αi:
P

2.2.4差分后的三维坐标和变形量计算
将以上各项差分改正后的观测值代入式(1),即可得到经差分后的监测点的三维坐标。
大坝表面变形监测点变形量计算见式(10)。

3 极坐标法变形测量精度分析
徕卡 TCA2003全站仪的标称测角精度为±0.5″,测距精度为±(0.5mm+1.0ppm×D),自动目标识别测量在600m距离内为±1.5mm。经过多次验证统计,实际角度测量精度为0.24″,即
监测点的斜距dP;且观测变形监测点时竖直角不应太大(或天顶距在90°附近);变形监测点的斜距dP不应超过800m,即可保证监测点的三维坐标的观测精度小于±1.0mm。
4 结语
从系统运行期间的数据来看,通过极坐标差分测量,监测点坐标中误差为±0.69mm,高差中误差为±0.83mm,均达到了亚毫米级的观测精度。既能满足工程测量中土石坝水平位移监测精mv=mα=mc=mβ=±0.24″;距离测量精度为±0.2mm,即ms=±0.2mm。设方位角为αp=45°,天顶距为Vp=89°,观测时间为10时至16时,大气垂直折光系数K=0.11,则极坐标差分测量精度估算值,如表1所示。
从表1中可以看出:基准点的斜距dC应大于度±2.0mm的要求,也能满足混凝土重力坝±1.0mm监测精度要求。垂直位移监测的精度也达到了混凝土重力坝±1.0mm监测精度要求,超过土石坝竖向位移±2.0mm的精度要求。
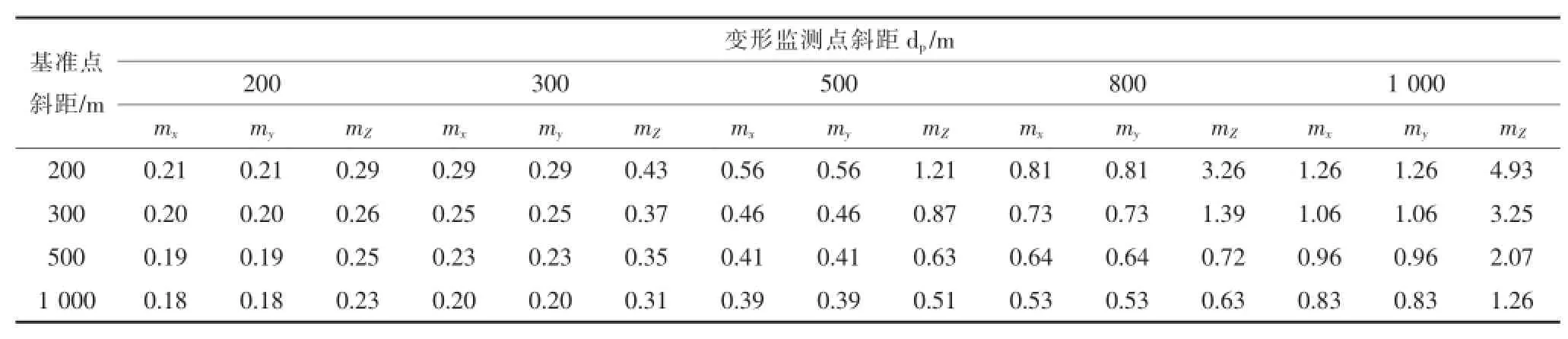
表1极坐标差分测量理论精度估算值 mm
在系统运行期间,对大坝顶部的监测点同时进行了几何水准竖向位移观测,采用Dini12电子水准仪配条码尺进行二等水准测量,从相同观测点同时段相对位移量来看,两种方法的竖向位移监测结果符合较好,变形趋势基本一致。
(责任编辑 崔春梅)
【中图分类号】TV698.1
【文献标识码】B
【文章编号】1009-6159(2015)-01-0028-03
收稿日期:2014-12-03
作者简介:付淑娟(1981—),女,助理工程师
