基于MCGS的偏航系统仿真平台设计
2015-07-25代春燕袁建华张方虎
代春燕 袁建华,2 张方虎 陈 轩 张 皓
(1.三峡大学电气与新能源学院,湖北宜昌 443002;2.三峡大学新能源微电网湖北省协同创新中心,湖北宜昌 443002;3.雅砻江流域水电开发有限公司 官地水电站,成都 610000)
风力发电机是将风能转换为电能的设备,其工作特性会直接影响到发电效率和电能质量.风能受环境因素影响极大,风向经常随机变动.当风力发电机中风轮扫掠面和风向不垂直时,其不但承受很大的风力载荷,而且输出功率也会急剧减少.偏航控制系统能够跟踪风向的变化,是控制风力发电机来适应外界风向变化,对风力发电机工作特性具有重要影响的一种装置.偏航系统能驱动风力发电机的机舱围绕塔架中心线旋转,使风轮扫掠面与风向保持垂直.
建立风力发电机偏航系统仿真平台,可以真实地模拟风力发电机偏航系统的工作环境以及工作过程,并且能够动态地监测系统各部分的运行参数,使研究者能够在真实安全的环境下直接学习风力发电机的运行机理和研究其控制策略.
MCGS集动画显示、流程控制、数据采集、设备控制与输出、网络数据传输、双机热备、工程报表、数据与曲线等诸多强大功能于一身,功能强大,运用灵活.本文采用MCGS软件,来组态偏航系统的仿真平台,并以S7-200作为控制器载体,通过它们之间的通讯连接来完成偏航控件的控制.
1 基于MCGS的偏航系统仿真平台设计
1.1 基于MCGS的偏航系统仿真界面设计
风力发电机组的偏航系统的功能主要有以下两点:自动对风和自动解缆.其中自动对风,是指正常运行时偏航控制系统自动对风,即当机舱偏离风向一定角度时,控制系统发出向左或向右调向的指令,机舱开始对风,当达到允许的误差范围内时,自动对风停止.自动解缆定义为当机舱向同一方向累计偏转3圈后,若此时风速小于风力发电机组启动风速且无功率输出,则停机,控制系统使机舱反方向旋转3圈解绕;若此时机组有功率输出,则暂不自动解绕;若机舱继续向同一方向偏转累计达4圈时,则控制停机,解绕;若因故障自动解绕未成功,在扭缆达5圈时,扭缆机械开关将动作,此时报告扭缆故障,自动停机,等待人工解缆操作.
根据空气动力学相关理论,叶轮从风源中吸收的功率可用下式表示:

式中,K为空气密度和叶轮扫掠面积所决定的系数;Cp为风能利用系数,由叶片数量、叶形、桨距决定;V∞是风轮无穷远前方风速;θ是风机风轮法线方向与风向的夹角,显然θ=0时,叶轮吸收的功率最大,其意义在于在整个偏航控制过程中,应使偏航角始终与风向角一致[1].由于在不同的时刻,风向是改变的,那么就需保证风力发电机的风轮始终跟随风向的变化,确保其准确对风.为使θ值趋近于零,控制器发出偏航指令控制偏航驱动机构动作,以此来调整机舱和风轮的方向.对风过程结束后,控制器发出的偏航指令信号消失,偏航过程结束.自动解缆可以认为是自动对风的一种特殊情况.
本文所需建立的仿真平台,即是用来模拟风力发电机组偏航系统的自动对风和自动解缆等动态过程.简而言之,偏航系统主要完成的是根据风速和风向来控制偏航角,故偏航系统的仿真界面主要由风向角、偏航角输入框、风速自定义区及偏航演示图组成.风速的大小直接影响风机的运行状态,本文将采用组合风速模型来表征自定义风速[2-4].
打开MCGS组态环境,新建了一个MCGS工程后,在用户编辑窗口中将会出现工作台窗口.
鼠标单击窗口中的“用户窗口”标签,双击“用户窗口”图标或选中“用户窗口”图标单击“设备组态”按钮(如此时没有“用户窗口”图标,单击“新建窗口”按钮即可),打开“窗口0”,利用MCGS提供的控件进行窗口组态,最终组态好的风力发电机组动态偏航界面如图1所示.
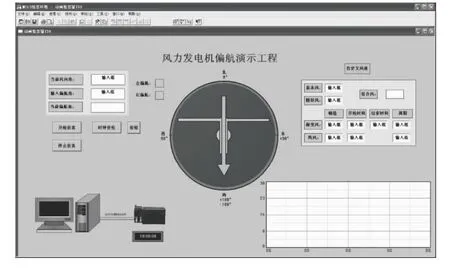
图1 偏航系统仿真界面
1.2 MCGS变量表的建立
利用PLC与MCGS组态软件之间的通讯,MCGS将用户输入参数发送到PLC端,PLC经过一系列计算处理并返回控制信号,MCGS要完成对控制信号的接收就需要建立相应的变量.根据该控制要求,建立如表1的变量表,其中:“Q00”、“Q01”作为左右偏航的动作信号,“Q00”上电时机组进行右偏航,动画变现为顺时针旋转,“Q01”上电时机组进行左偏航,动画表现为逆时针旋转;开关量“开始仿真”作为系统的起始信号,当其正跳变时,仿真系统开始运转;“停止仿真”信号关闭动画演示;“风向角”与“偏航角”接受来自MCGS界面的输入参数值;“风向角1”与“偏航角1”保存经偏航处理后的风向角与偏航角.
依据表1的变量表在工作台实时数据库中建立对应的变量,如图2所示.
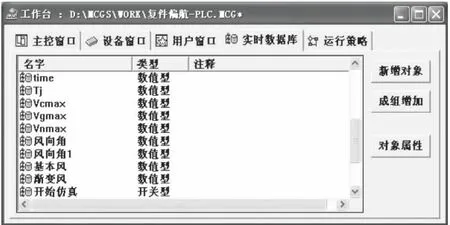
图2 MCGS内部数据库
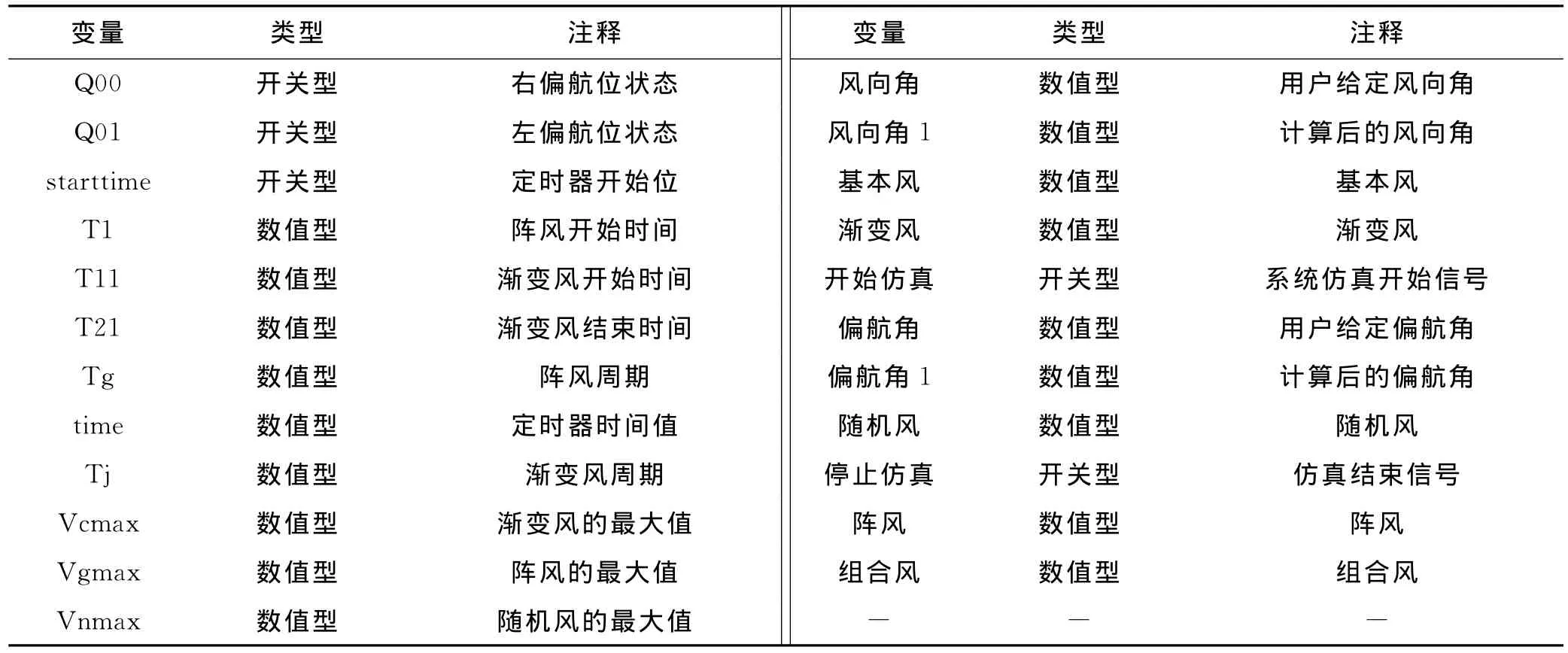
表1 用户自定义变量表
双击MCGS组态界面中的偏航角图标,将弹出动画组态属性设置窗口,该窗口的主要功能是将位图与相应的变量关联起来,如对于变量“风向角1”,定义风向角取值范围为±180°,设置其初值为0,即系统仿真时风向角指向正北方向,当变量“风向角1”变化时,位图的指向随着风向角的数值变化而指向相应的方向.依此类推,将其他变量按相应的要求进行关联即可实现通过PLC来控制动态偏航过程.
1.3 MCGS与PLC的通讯设置
利用PLC控制组态软件中偏航系统动作需要进行必要的通讯设置.在MCGS系统中,由“设备窗口”负责建立系统与外部硬件设备的连接,使得MCGS能从外部设备读取数据并控制外部设备的工作状态,实现对应工业过程的实时监控.具体设置步骤如下所示.
1)前后台通讯设置:在MCGS中PLC设备是作为“子设备”挂在“串口父设备”下的,因此在向设备组态窗口中添加PLC设备前,必须先添加一个“串口父设备”,当直接用串口进行本地通讯时,添加“通用串口父设备”.双击“通用串口父设备”,添加一个串口通讯设备,然后添加“西门子S7-200PPI”子设备.
2)设置串口通讯“父设备”参数:根据所用设备的通讯协议设置所用的通讯端口,通讯波特率,数据位数,奇偶校验方式和停止位位数,按如图3(a)所示的要求设置串口通讯父设备,完成MCGS与PLC设备的联接.
3)设置串口通讯子设备参数:要对PLC中的数据进行读写操作,只需要在PLC设备的设备属性设置对话框中对其通道属性进行设置,并建立起与MCGS实时数据库中的数据的连接,按如图3(b)所示的要求设置串口通讯子设备.
4)增加输入输出通道:依据变量表(如表1所示),在图3(c)所示的PLC“通道属性设置”对话框通过增加通道按钮添加输入输出通道参数.
5)关联S7-200与MCGS中的变量:点击设备属性设置一栏中的通道连接,关联S7-200与MCGS中的变量,如图3(d)所示.完成MCGS中的数据对象与PLC内部寄存器间的连接,具体的数据读写将由主控窗口根据具体的操作情况自动完成.
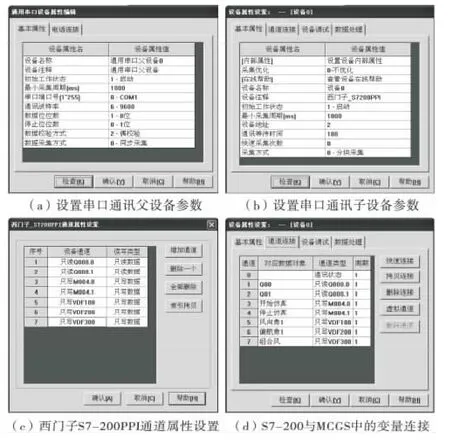
图3 MCGS与PLC的通讯设置
2 仿真与验证
在MicroWIN STEP7中根据偏航及解缆流程图(具体见文献[5])编写PLC程序.由图3(d)可知,中间变量M4.0为开始仿真的启动信号,M4.1为停止仿真信号,VDF100、VDF200、VDF300分别保存来自MCGS发送过来的风向角、偏航角及组合风速,这些变量分别控制图1中对应控件.下面将设置仿真参数,首先来模拟设定状况下风力发电机偏航系统的自动对风过程,验证该平台的可利用性.本文对偏航系统对风要求与文献[5]中分析一致,即风力发电机组连续地检测风向角变化,然后判断是否需要偏航,当检测到机头方向与风向角差值超过设定角度(5°),风力发电机组将执行偏航对风,当此角度达到设定角度(1°)之内时,风力发电机组停止偏航.
仿真时,如图4所示,风向角为22°,偏航角为170°,它们的差值大于5°,故需要执行自动对风,组合风速中基本风、随机风、渐变风和阵风所有相关参数与图4中自定义风速对应输入框所示.
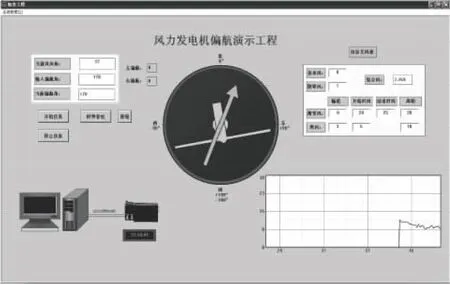
图4 风力发电机组的动态偏航过程
开始仿真后,偏航动作按照既定的流程动作(相关控制要求,见参考文献[5]):当组合风速大于4m/s(风力发电机组定义的最小启动风速)时,偏航机构开始执行左偏航,随着渐变风的加入,组合风速小于4 m/s,此时机组停止偏航等待风速信号,渐变风结束后,左偏航位状态重新上电,机组继续偏航直到偏航角与风向角差值不大于1°满足发电需求.
进一步进行自动解缆功能的验证,当设置偏航角处于[1 080°,1 440°]之间,仿真结果显示风速大于4 m/s时,机组继续发电不执行解缆动作;风速低于4 m/s时,偏航机构执行解缆动作.综上所述,偏航系统仿真平台设计符合机组实际动作要求,达到了预期目标.
3 结 论
本文运用MCGS组态环境,完成偏航系统仿真平台界面的设计;建立MCGS与PLC S7-200之间的通讯连接,实现仿真界面的控制;运用MCGS运行环境,进行偏航系统的模拟运行.验证结果表明仿真平台能够按要求完成偏航系统的模拟运行,具有一定的实际应用价值.完整的风力发电机仿真平台尚未完成,有待进一步研究.
[1] 魏列江,张振华,胡晓敏,等.中小型风力机偏航控制系统设计[J].西华大学学报,2011,30(2):75-77.
[2] 魏毅立,韩素贤,时盛志.风力发电系统中组合风速的建模及仿真[J].可再生能源,2010,280(2):18-20.
[3] 刘 璇,贾 彦,任 哲,等.基于风特性和小型风力机的组合风速模型建立[J].工程热物理学报,2014,35(11):2178-2181.
[4] 杨之俊.基于Matlab的组合风速建模与仿真[J].安徽电气工程职业技术学院学报,2008,13(3):74-77.
[5] Chunyan Dai,Jianhua Yuan,Fanghu Zhang.Study on the Prevent Cable Twisting Control Strategy of Wind Turbine Yaw Control System[C].Proceedings-2013 2nd International Symposium on Instrumentation and Measurement,Sensor Network and Automation(IMSNA),2013:420-424.
