基于物联网的智能装备信息感知科研实验平台构建研究
2015-07-21何嘉武吴迪雷震
何嘉武+吴迪+雷震
摘 要:针对目前装备指挥员对作战地域内的装备、设施设备的个体和综合状态信息不能实时掌握,缺乏战场自组网手段等问题,采用军用物联网技术构建了智能装备信息感知科研实验平台来模拟再现战场情况,同时利用无线传感器网络的自组织特性,形成战场装备信息传感网,从而向装备指挥员提供融合处理后的装备状态信息,并给出装备保障建议,为装备指挥员定下装备保障决心提供技术支持。
关键词:物联网;装备;保障;信息感知
中图分类号:TP393 文献标识码:A 文章编号:2095-1302(2015)07-00-04
0 引 言
装备物联网云科研实验平台,集成了先进的云计算技术、移动/互联网通信技术、嵌入式中间件技术、无线传感器网络技术等,面向装备使用过程中的各个环节,如战地状况、装备车辆技术状况、车场管理、装备维修、装备物资管理等,具有统一开放的API接口,提供各个环节各种传感器数据的接入、存储以及应用服务。用户可以通过桌面平台、军用手机平台等终端登录云平台,远程访问系统中的物联网设备,也可利用开放的API方法搭建各种物联网应用系统。
1 硬件组成
装备物联网云科研实验平台的基础系统采用弯曲开源的云计算平台OpenStack实现,主要由云控制器、云计算节点、客户端组成。
部署过程中,云控制器与计算节点由两台高配置的台式机组成,客户端为任意机器(桌面台式机、智能手机等)。它们通过千兆交换机互联。上行接入互联网,下行通过以太网或移动通信网络与应用科研实验区的实训平台连接。
该云平台的具体硬件组成如表1所列。
表1 装备物联网云平台硬件配置清单
主要设备名称 硬件 性能 数量
控制器 CPU 第二代智能英特尔 酷睿 i7 处理器i7-3770,3.4 GHz 1
内存 4GDDRIII 1333
硬盘 1 TB
网卡 集成千兆网卡
计算节点 CPU 第二代智能英特尔 酷睿 i7 处理器i7-3770,3.4 GHz 1
内存 4GDDRIII 1333
硬盘 1T
网卡 集成千兆网卡
2 软件组成
平台软件主要包括OpenStack云计算平台以及装备物联网云系统两部分。
2.1 OpenStack云计算平台
OpenStack云计算平台帮助我们建立自己的IaaS,分别在两台PC机上部署云控制器和计算节点。云控制器主要项目有Compute(Nova)、对象存储(Object Storage,Swift)、镜像服务(Image Service,Glance)。另外还包括Identity Service(Keystone)和Dashboard(Horizon)。Nova提供虚拟计算服务,Swift提供存储服务,Glance提供虚拟机镜像的注册、分发服务,Keystone提供认证和授权服务,Horizon提供一个基于页面的模块化接口以及特定部署服务的目录。
(1)Compute (代号为 Nova):是一套控制器,用于为单个用户或使用群组启动虚拟机实例,以及为包含着多个实例的特定项目设置网络。
(2)对象存储(代号Swfit):是一套用于在大规模可扩展系统中,通过内置冗余及容错机制实现对象存储的系统。这些对象能够通过一个 REST API 或是像 Cyberduck(一个开放源代码的 FTP 及 SFTP 软件,基于 GPL 授权,拥有简单的操作界面,支持 WebDAV 和 Amazon S3 浏览与文件的传输等),可以对接对象存储API 的客户端加以恢复。
(3)镜像服务(代号Glance):是一套虚拟机镜像查找及检索系统。它能够以三种形式加以配置:利用 OpenStack 对象存储机制来存储镜像;利用 Amazon 的简单存储解决方案(简称 S3)直接存储信息;或者将 S3 存储与对象存储结合起来,作为 S3 访问的连接器。OpenStack 镜像服务支持多种虚拟机镜像格式,包括 VMware(VMDK)、Amazon镜像(AKI、ARI、AMI)以及 VirtualBox 所支持的各种磁盘格式。
2.2 装备物联网云系统
首先在IaaS基础上,部署Web Service的开发环境,构建PaaS。然后在此基础上,开发装备物联网云服务系统。它面向装备保障业务过程中的各个环节,如战场状况感知、装备车辆技术状况感知、装备场管理、装备维修、装备储供等,将各个环节的设备以及感知的动态信息,通过系统网关接入云平台。云平台构建的Web Service,为用户提供各种API函数接口以实现远程调用、监控等操作。用户可以通过电脑、手机等终端的应用程序登录云平台,远程访问系统中的任何设备;也可利用开放的API方法搭建各种物联网应用系统。
3 智能信息感知平台
3.1 功能构成
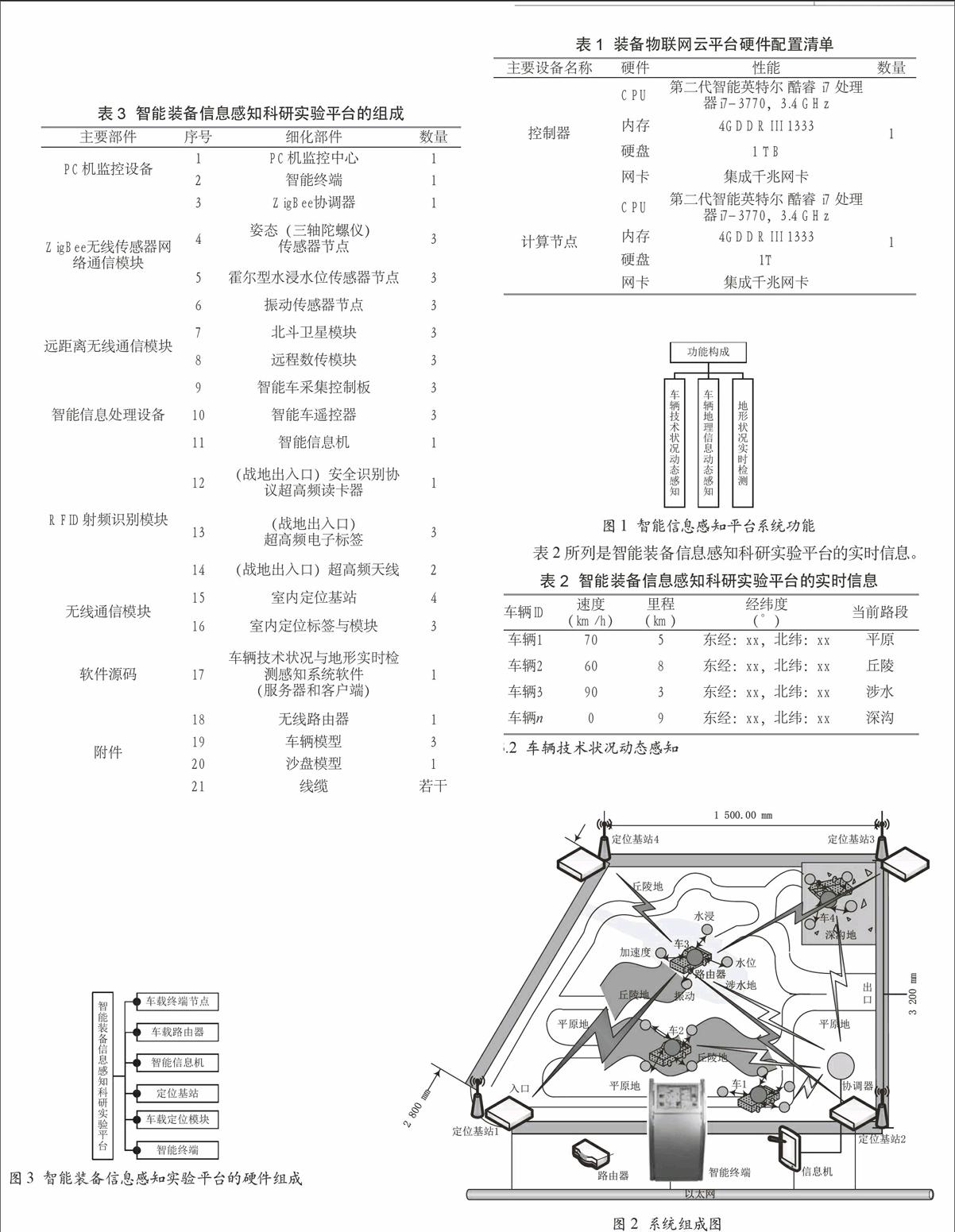
智能信息感知平台系统包括车辆技术状况动态感知、车辆地理信息动态感知、地形状况实时检测等三个功能,如图1所示。
图1 智能信息感知平台系统功能
表2所列是智能装备信息感知科研实验平台的实时信息。
表2 智能装备信息感知科研实验平台的实时信息车辆ID 速度
(km/h) 里程(km) 经纬度
(°) 当前路段
车辆1 70 5 东经:xx,北纬:xx 平原
车辆2 60 8 东经:xx,北纬:xx 丘陵
车辆3 90 3 东经:xx,北纬:xx 涉水
车辆n 0 9 东经:xx,北纬:xx 深沟
3.2 车辆技术状况动态感知
主要实现车辆行驶速度、公里数等自身技术性能的动态感知,以及当前地形对车辆造成破坏损伤等状况的判断,使指挥官能够及时全面地掌握战地车辆状况。
车辆技术性能的感知是通过安装在车内的加速度、位移传感器实时采集车辆行驶的加速度、路程等数据,经过分析处理获得。
当前地形对车辆的破坏损伤的感知是由加速度传感器结合用于地形判断的震动、水浸、水位等传感器协同工作,通过数据融合,得出车辆受损的不同情况。如当前车辆涉水深度超过最高限度,有可能造成发动机受损,需要到维修车间进行鉴定。又如车辆经过起伏地,振动剧烈,履带或底盘受损,需要到维修车间进行鉴定。
通过无线传感器网络实时传送到网络信息机,最后通过TCP/IP协议可靠地传送给作战指挥中心。
3.3 车辆地理信息动态感知
主要实现车辆经纬度、海拔等地理位置信息的获取与传输。它由安装在车辆上的北斗卫星定位系统和基于Ad hoc技术的无线自组织网络节点组成。北斗卫星定位系统主要用于采集当前车辆的经度、纬度、海拔等数据,经过分析处理后,通过自组织网络传输给网络信息机,由信息机再通过TCP/IP协议传送给作战指挥中心。
说明:由于在室内无法获取北斗卫星定位信息,因此沙盘选用室内定位系统实现车辆的地理位置定位模拟。
3.4 地形环境动态感知
主要实现战地地形数据的动态感知与传输。它由安装在车辆上的加速度、震动、水浸、水位等传感器实时采集车辆重力加速度、震动幅度、是否涉水、以及涉水深度等数据,经过数据处理与融合,得出当前车辆行驶的地形状况,如起伏地、涉水地、深沟等,并将结论通过自组织网传输给网络信息机,再由信息机通过TCP/IP协议传送给作战指挥中心。
4 整个平台的组成
整个系统的结构与外观尺寸如图2所示。
系统由车载终端节点、车载路由器、车载定位模块、定位基站、内置ZigBee协调器的智能信息机、智能终端以及沙盘模型组成。加速度与振动终端节点、车载路由器以及车载定位模块安装在车载智能传感器控制盒内。
4.1 硬件组成
系统平台的硬件组成如图3所示。具体如下:
图3 智能装备信息感知实验平台的硬件组成
(1)车载终端节点:包括加速度、水浸、水位、振动等传感器节点。
(2)车载路由器:用于汇聚车辆中加速度、水浸、水位、振动节点的信息,经过数据处理,转发给智能信息机。
(3)智能信息机:由A8高性能处理器实现,具有存储容量大、运行速度快的优点,内部集成ZigBee协调器以及移动网络通信模块。其功能是接收车载路由器发回的检测数据,计算出当前车辆自身的技术状况,以及行驶地形的状况,存入数据库。并通过TCP/IP协议将此信息传输给智能终端,用户可在终端上浏览各个战地车辆以及地形情况。
(4)定位基站:四个定位基站组成一组,对所围矩形区域携带定位标签的模块进行x、y方向坐标的计算与传输,工作和储存温度等均符合工业环境应用需求。
(5)车载定位模块:车辆安装定位模块,与四个定位基站组成小型定位系统。随着车辆的移动,定位模块实时把x、y坐标值传输给基站。
(6)智能终端:是一台可触摸的PC机,通过以太网与智能信息机进行连接。运行车辆技术状况与地形状况感知系统软件,可通过TCP/IP协议与信息机进行数据通信,接收信息机汇聚的所有车辆的数据,用户可在该终端上浏览车辆行驶的各种信息。
具体硬件组成情况如表3所列。
4.2 软件组成
平台软件主要包括战地小车多传感器采集程序、无线网络传感器数据透明传输软件、嵌入式网关汇聚软件、服务器软件、客户端车辆动态显示软件等。
4.2.1 战地小车多传感器采集程序
采用32位ARM Cortex-M3处理器STM32作为控制器,定时轮询读取战地小车上安装的各种传感器。具体包括:处理陀螺仪原始数据得到全方位姿态角度,通过对加速度和角速度融合计算得出车辆的ROLL(翻滚角)、PITCH(俯仰角)、YAW(偏航角),可以得到车辆的爬坡角度、偏航角度等;采用LM298电机驱动芯片,驱动12 V直流电机;可以通过霍尔传感器测量车辆行驶速度,以及里程;通过霍尔型水浸传感器,测量车辆经过涉水路面的车辆浸水情况,最后将这些信息传输给嵌入式网关。
表3 智能装备信息感知科研实验平台的组成主要部件 序号 细化部件 数量
PC机监控设备 1 PC机监控中心 1
2 智能终端 1
ZigBee无线传感器网络通信模块 3 ZigBee协调器 1
4 姿态(三轴陀螺仪)
传感器节点 3
5 霍尔型水浸水位传感器节点 3
6 振动传感器节点 3
远距离无线通信模块 7 北斗卫星模块 3
8 远程数传模块 3
智能信息处理设备 9 智能车采集控制板 3
10 智能车遥控器 3
11 智能信息机 1
RFID射频识别模块 12 (战地出入口)安全识别协议超高频读卡器 1
13 (战地出入口)
超高频电子标签 3
14 (战地出入口)超高频天线 2
无线通信模块 15 室内定位基站 4
16 室内定位标签与模块 3
软件源码 17 车辆技术状况与地形实时检测感知系统软件
(服务器和客户端) 1
附件 18 无线路由器 1
19 车辆模型 3
20 沙盘模型 1
21 线缆 若干
4.2.2 无线网络传感器数据透明传输软件
基于Z-Stack2007协议栈,独立自主开发的数据透明传输程序。它主要实现ZigBee网络的建立、节点的自动入网、节点之间数据的透明传输功能。
4.2.3 嵌入式网关汇聚软件
基于嵌入式Linux操作系统和Qt函数库,开发的战地小车多传感器信息汇聚软件,主要用于保存当前车辆的技术状况,如车速、方位、水浸水位以及加速度值,并综合多传感器监测信息经过融合,判断车辆当前行驶的路段状况,最后通过TCP/IP协议将车辆状况、路段状况等信息实时传输至服务器保存。
4.2.4 服务器软件
建立TCP和UDP服务器,下行采用UDP协议与嵌入式网关通信,上行通过TCP协议与客户端数据通信。
4.2.5 客户端车辆动态显示软件
建立客户端和人机交互界面,通过TCP协议申请与服务器的连接,获取服务器接收的车辆速度、路程、当前行驶路段状况等各类信息,动态显示在界面上。
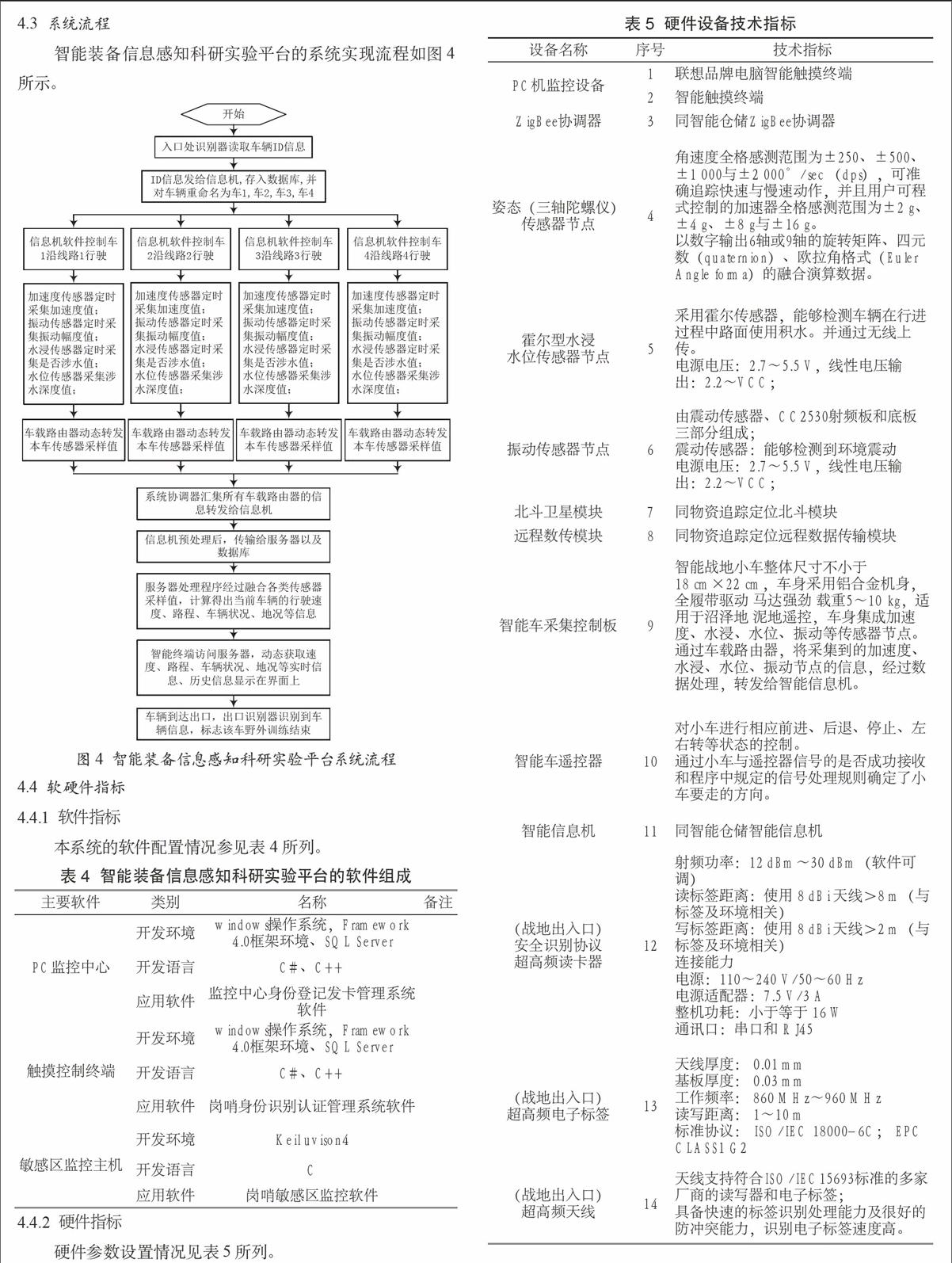
4.3 系统流程
智能装备信息感知科研实验平台的系统实现流程如图4所示。
图4 智能装备信息感知科研实验平台系统流程
4.4 软硬件指标
4.4.1 软件指标
本系统的软件配置情况参见表4所列。
表4 智能装备信息感知科研实验平台的软件组成主要软件 类别 名称 备注
PC监控中心 开发环境 windows操作系统,Framework 4.0框架环境、SQL Server
开发语言 C#、C++
应用软件 监控中心身份登记发卡管理系统软件
触摸控制终端 开发环境 windows操作系统,Framework 4.0框架环境、SQL Server
开发语言 C#、C++
应用软件 岗哨身份识别认证管理系统软件
敏感区监控主机 开发环境 Keil uvison4
开发语言 C
应用软件 岗哨敏感区监控软件
4.4.2 硬件指标
硬件参数设置情况见表5所列。
表5 硬件设备技术指标设备名称 序号 技术指标
PC机监控设备 1 联想品牌电脑智能触摸终端
2 智能触摸终端
ZigBee协调器 3 同智能仓储ZigBee协调器
姿态(三轴陀螺仪)
传感器节点 4 角速度全格感测范围为±250、±500、±1 000与±2 000°/sec (dps),可准确追踪快速与慢速动作,并且用户可程式控制的加速器全格感测范围为±2 g、±4 g、±8 g与±16 g。
以数字输出6轴或9轴的旋转矩阵、四元数(quaternion)、欧拉角格式(Euler Angle forma)的融合演算数据。
霍尔型水浸
水位传感器节点 5 采用霍尔传感器,能够检测车辆在行进过程中路面使用积水。并通过无线上传。
电源电压:2.7~5.5 V,线性电压输出:2.2~VCC;
振动传感器节点 6 由震动传感器、CC2530射频板和底板三部分组成;
震动传感器:能够检测到环境震动
电源电压:2.7~5.5 V,线性电压输出:2.2~VCC;
北斗卫星模块 7 同物资追踪定位北斗模块
远程数传模块 8 同物资追踪定位远程数据传输模块
智能车采集控制板 9 智能战地小车整体尺寸不小于18cm×22 cm,车身采用铝合金机身,全履带驱动 马达强劲 载重5~10 kg,适用于沼泽地 泥地遥控,车身集成加速度、水浸、水位、振动等传感器节点。通过车载路由器,将采集到的加速度、水浸、水位、振动节点的信息,经过数据处理,转发给智能信息机。
智能车遥控器 10 对小车进行相应前进、后退、停止、左右转等状态的控制。
通过小车与遥控器信号的是否成功接收和程序中规定的信号处理规则确定了小车要走的方向。
智能信息机 11 同智能仓储智能信息机
(战地出入口)
安全识别协议
超高频读卡器 12 射频功率:12 dBm~30 dBm(软件可调)
读标签距离:使用 8 dBi 天线>8 m(与标签及环境相关)
写标签距离:使用 8 dBi 天线>2 m(与标签及环境相关)
连接能力
电源:110~240 V/50~60 Hz
电源适配器:7.5 V/3 A
整机功耗:小于等于 16 W
通讯口:串口和 RJ45
(战地出入口)
超高频电子标签 13 天线厚度: 0.01 mm
基板厚度: 0.03 mm
工作频率: 860 MHz~960 MHz
读写距离: 1~10 m
标准协议: ISO/IEC 18000-6C; EPC CLASS1 G2
(战地出入口)
超高频天线 14 天线支持符合ISO/IEC15693标准的多家厂商的读写器和电子标签;
具备快速的标签识别处理能力及很好的防冲突能力,识别电子标签速度高。
(续表)
设备名称 序号 技术指标
室内定位基站 15 四个定位基站组成一组,对所围矩形区域携带定位标签的模块进行x、y方向坐标的计算与传输,工作和储存温度等均符合工业环境应用需求。
覆盖范围:5~50 m(2D) 10~100 m(1D)
典型精度:<2 m
射频功:率0 db m~20 dbm(1mW~100 mW)
信号灵敏度:-95 dbm @ 22 Mb/s模式
工作频:2.40 GHz~2.485 GHz
室内定位标签与模块 16 工作频率:10 cm
工作频率:3.5 GHz~6.5 GHz(可调)
射频功率:0 dbm~17 dbm(1 mW~70 mW)
信号灵敏度:-106 dbm @ 500 MHz
位置刷新率:1 Hz
工作时间:30天
交互功能:按键,LED指示灯
充电方式:DC5 V,无线充电
电源: 3.7 V 锂电池
无线路由器 17 TP-LINK无线路由器
车辆模型 18 仿真模型车
沙盘模型 19 设备采用钢结构及铝合金型材承重支架;尺寸不小于:1 500 mm×3 200 mm ×500 mm,模拟车辆技术状况与战地沙盘。沙盘需满足造型新颖,做工精致,且需要配置平原地,丘陵地、深沟地以及涉水地等多种不同模拟场地环境,以达到战地沙盘模拟演练的不同效果。
5 结 语
基于物联网的智能装备信息感知科研实验平台按照“缩小场地、以近代远、以少代多、按业务展现”的思想,采用军用物联网技术,以实验柜、沙盘模型等方式实现对作战地域环境模拟以及作战装备和设施设备状态的全维全时监测,并能据此进行融合分析和判断,为装备指挥员定下装备保障决心提供依据。该平台具有自主知识产权,能够满足军队院校教学、科研、实验一体化的要求,具有广阔的应用前景。
参考文献
[1]陈宇峰.智能交通系统中的交通信息采集技术研究进展[J].湖北汽车工业学院学报,2010,24(2):30-34..
[2]耿立雄,陈宪麦.轨道平顺性综合分析系统的研究[J].企业技术开发,2010(1):50-54.
[3]陈艳艳,王东柱.智能交通信息采集分析及应用[M].北京:人民交通出版社,2011.
[4]王俊.智能交通信息采集子系统的研究实现[D].武汉:华中科技大学,2006.
[5]刘震.智能交通信息采集技术研究与软件实现[D].西安:西北工业大学,2006.
