大型公建机动车出入口下游功能区面积计算
2015-07-20卓曦郑柯卢银凤
卓曦,郑柯*,卢银凤
(1.福州大学土木工程学院,福州350108;2.广西电力工业勘察设计研究院,南宁530023)
大型公建机动车出入口下游功能区面积计算
卓曦1,郑柯*1,卢银凤2
(1.福州大学土木工程学院,福州350108;2.广西电力工业勘察设计研究院,南宁530023)
为定量化大型公建机动车出入口交通影响范围,假设出入口右转交通冲突区为其下游功能区,分析出入口下游功能区面积的交通影响特征.进而以交通冲突时后随右转车位置为右转冲突分布点,给出基于摄影测量法的出入口右转冲突分布点实际坐标公式,以测量右转冲突区域.然后通过右转冲突坐标点曲线拟合,界定右转冲突区端点,从而确定出入口下游功能区面积模型.最后以某大型公建机动车出入口为例,进行成果试算及仿真验证.验证结果表明,出入口下游功能区内城市道路交通延误较大,且延误数值存在先急剧增大后缓慢减小的变化态势,吻合了右转冲突区域的形状和面积特征.因而基于右转冲突区域形状的出入口功能区面积模型可界定大型公建出入口影响范围,有助于城市道路微观交通组织优化.
交通工程;功能区面积;交通冲突;出入口;摄影测量法;大型公建
1 引言
大型公共建筑机动车出入口(以下简称“出入口”)生成的大量出入交通易破坏城市道路车流稳定性,导致交通拥堵和事故.因此,为提高城市道路通行效率和安全水平,城市交通组织优化应着重考虑大型公建出入口,提出相应限速、渠化措施.其中,出入口交通影响范围有助于城市道路分车道限速值计算、导流标线设置,可实现交通冲突区域分离的交通组织策略.
大型公建出入口功能区为建筑出入交通对城市车流的影响区域,分为上游和下游功能区[1].如图1所示,出入口下游功能区为大型公建驶离车流和城市道路车流的交通冲突集中区域.在出入口功能区方面,国外研究集中于通过实地数据统计分析,明确了功能区空间构成要素[2],并建立了车速、影响车辆比例等交通参数为自变量的功能区长度回归模型[3,4].国内研究较少,典型成果为基于驾驶行为的出入口上游功能区长度公式[5].可见国内外研究侧重出入口功能区长度,且多考虑上游功能区空间,鲜见下游功能区面积研究.
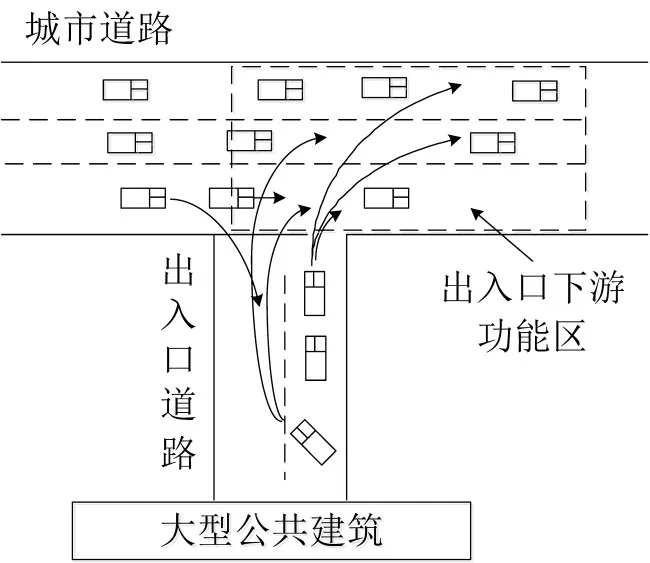
图1 大型公建机动车出入口下游功能区Fig.1 Vehicleaccessdownstream functionalareaof large public building
假设城市道路设置中央分隔带,且出入口采用右进右出的交通组织方式,本文基于出入口下游功能区面积的交通影响分析,采用摄影测量法测量出入口下游右转冲突区域,即出入口右转车流引发的交通冲突分布区域,进而通过冲突区域端点界定,建立出入口下游功能区面积模型.基于仿真延误分析的实例计算结果表明,从交通冲突表象的角度出发,本文提出的出入口下游功能区面积计算方法有助于出入口交通影响范围界定.
2 出入口下游功能区面积的交通影响分析
出入口下游功能区内交通冲突现象集中表现为右转交通冲突.根据交通冲突的定义[1],右转交通冲突体现于右转车与其它车辆在时空上到达同一位置时,在碰撞前的预定义最小时间内,后随右转车采取有效的避让措施以避免碰撞发生.考虑交通禁左,驶离大型公建的右转车流形成一定面积的交通冲突区,因而本文假设出入口右转交通冲突区为其下游功能区.
为分析出入口下游功能区面积的交通影响特征,将城市道路车行道从外侧向中分带内侧依次编号为第1,2,…,m车道,m≥2,并在交通仿真软件VISSIM中,设置仿真环境如下:
(1)城市道路采用单向二车道,单车道宽度为3.75m,单车道车流量为800 pcu/h;
(2)出入口道路采用双向二车道,单车道宽度为3.75m,其中进口车道流量为246 pcu/h,出口车道流量为687 pcu/h;
(3)仿真区域选定城市道路上大型公建出入口车道边缘线至其下游距离200m位置;
(4)在城市道路上,以出入口车道边缘线为出行时间区域(Travel Times Sections)起点,每隔20m设置数据采集点(Data Collection)和出行时间区域终点,从而构建10个出入口下游区域.
如图1所示,右转车流引发的交通冲突主要为同向冲突(同向右转车交通冲突)、合流冲突(右转和直行车交通冲突)和对向冲突(出入口道路上对向右转车交通冲突),从而通过仿真视频观测,根据右转冲突分布估算出右转冲突区域面积为623m2.进而利用延误时间(Delay Times)和数据采集等仿真评价模块,统计城市道路各车道的路段平均车速和第j个出行时间区域单车平均延误dj(s/pcu)等评价指标,以分析冲突区面积的交通影响.
分析表1可见,由于出入口下游功能区交通影响,右转冲突区面积均匀分布于外侧车道,导致外侧车道在该区域的路段平均车速较低,单车平均延误较高.而右转冲突区面积以抛物线状分布于内侧车道,导致内侧车道在该区域的路段平均车速较低且存在低峰值,单车平均延误较高且存在高峰值.当仿真环境中城市道路横断面形式为单向三车道或四车道时,采用上述方法可得类似规律.
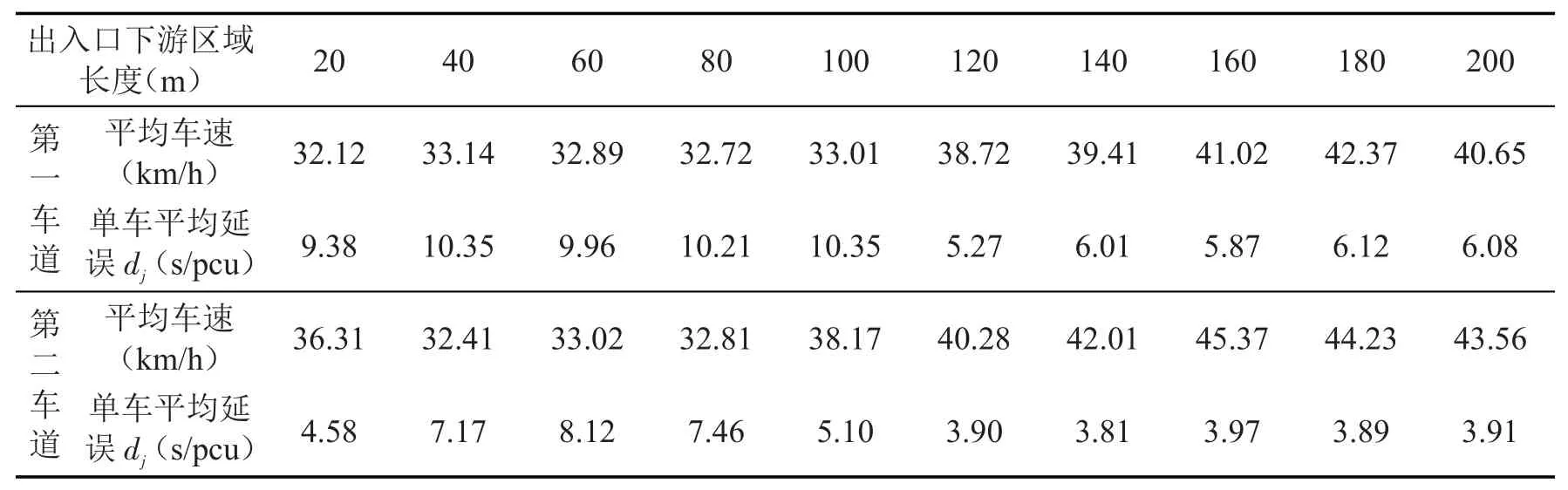
表1 基于仿真分析的出入口下游功能区交通影响指标Table1 Access downstream functionalarea traffic im pact indexes based on simulation analysis
3 基于摄影测量法的右转冲突区域测量方法
仿真视频估计右转冲突区域面积的方法存在较大随机性和主观性,因此从右转交通冲突实地调查的角度界定右转冲突区,具有更好的操作性和精确度.沈家军[6]提出了基于摄影测量法的交叉口机非冲突区域界定方法.该方法具有较强直观性和适用性,但该方法简单地将非机动车行驶区域作为冲突区,且未定量化冲突区域范围.为便于计算,本文以交通冲突发生时后随右转车所处位置为右转冲突分布点,在此基础上,依据摄影测量法[6],通过右转冲突分布点坐标计算,研究出入口右转冲突区测量方法,以定量化右转冲突区域.
3.1 测量及计算原理
(1)通过出入口交通摄像,视频采集连续的右转车流动态图像,从而提出右转冲突分布点图像坐标.
(2)通过图像坐标与实际坐标转换,计算右转冲突分布点在出入口区域的实际坐标,从而以坐标点较为密集的区域作为右转冲突区域.
3.2 右转冲突分布点实际坐标计算
3.2.1 坐标转换原理
实地选取4个已知点为标定点,因而(xi,p,yi,p)为标定点图像坐标,(xi,r,yi,r)为标定点实际坐标(m),i=1~4.以第j点为待求点,j≥5,(xj,p,yj,p)为待求点图像坐标,(xj,r,yj,r)为待求点实际坐标(m),有
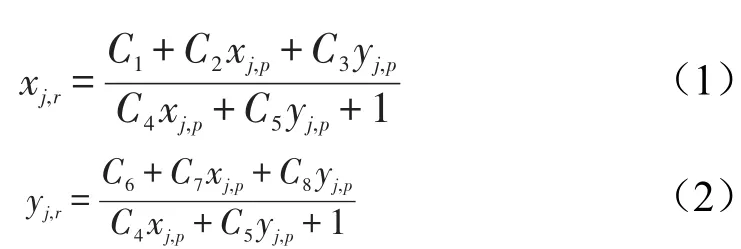
式中C1,C2,…,C8为转换矩阵系数.
根据标定点坐标,标定C1,C2,…,C8为

3.2.2 右转冲突分布点实际坐标
如图2所示,在出入口区域,城市道路车行道边缘线为x轴,出入口道路中心线为y轴,x轴和y轴的交点为坐标原点(0,0),从而构建右转交通冲突区实际坐标系.
如图2所示,以原点作为第1标定点(0,0);根据现场观测,从第1点沿x轴正方向量取l12(m),生成第2标定点(l12,0);y轴和城市道路中央分隔带的交点作为第3标定点(0,WL/2),其中WL为城市道路横断面宽度(m);从第3点沿城市道路车流方向,在中央分隔带上量取l12,生成第4标定点(l12,WL/2).
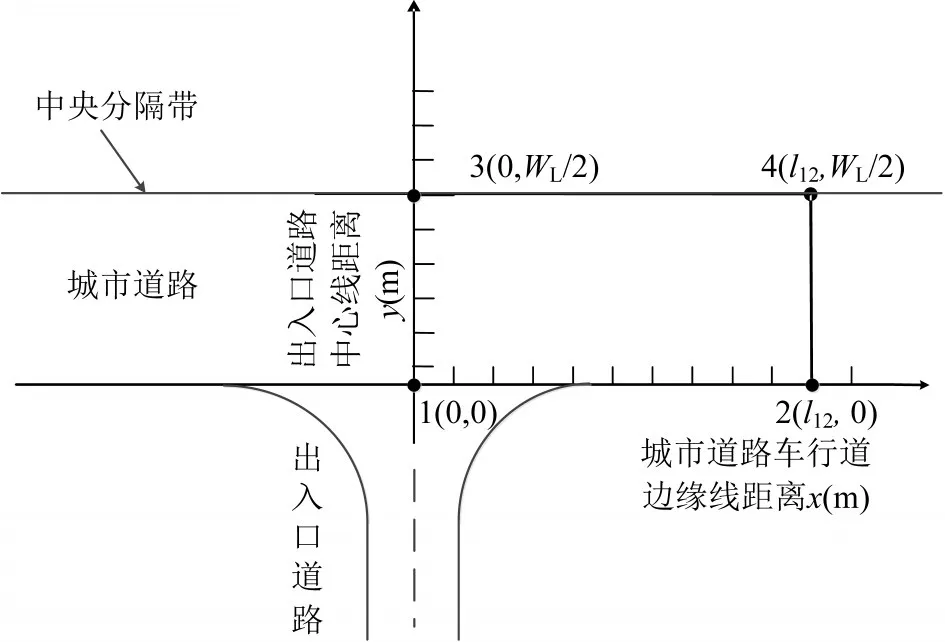
图2 右转交通冲突区域实际坐标系Fig.2 Realcoordinate system of right-turn traffic conflict area
将某日高峰小时的出入口交通视频截屏成300多幅图片,从而获取右转冲突分布点图像坐标.根据4个标定点坐标,利用式(3)计算C1,C2,…,C8.进而根据式(1)和式(2),计算右转冲突分布点实际坐标,在此基础上,画出右转冲突区域.
4 出入口下游功能区面积计算
4.1 右转冲突区域端点界定
如图3所示,通过右转冲突区域边缘点曲线拟合,发现冲突区域上部分为曲边形,下部分为矩形.进入外侧车道的右转冲突分布点集中于矩形中;进入内侧车道的右转冲突分布点集中于曲边形中.
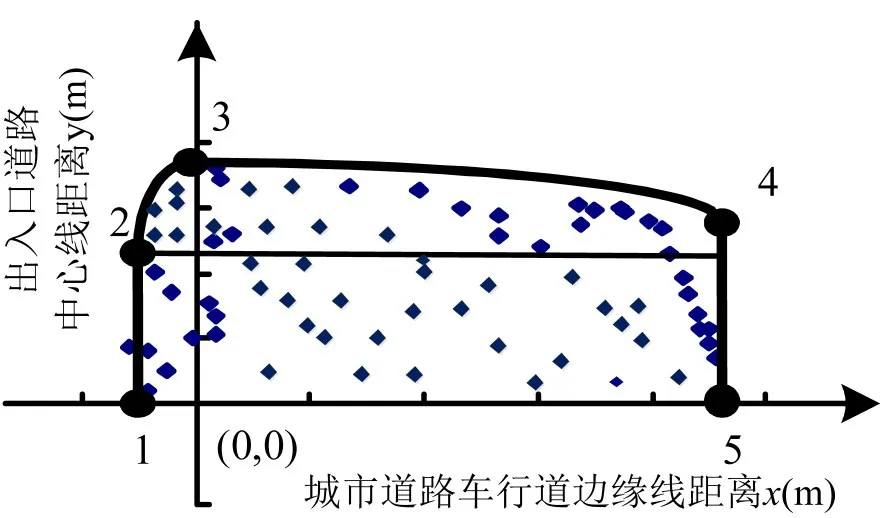
图3 右转冲突区域示意图Fig.3 Right-turn conflictarea schematic diagram
如图3所示,根据出入口环境和右转交通冲突分布,采用5个端点界定右转冲突区域边界.(xj,yj)为冲突区域端点坐标(m),1≤j≤5.
第1端点界定:以出入口右转交通冲突分布的左侧边界点为第1端点.根据视频观察,假设第1端点极限位置为出入口道路和城市道路车行道边缘线交点(-W/2,0)的右侧点,W为出入口宽度(m),即该交点沿x轴正方向偏移一半车辆宽度Wveh(m)的位置.
第2端点界定:通过第1端点画出城市道路垂线,该垂线与城市道路第1、2车道分界线相交的点为第2端点.因此第2端点是第1车道和内侧车道所在右转冲突区域的分界点.
第3端点界定:车辆通过第2端点右转进入第m车道时,以其左侧轮胎轨迹在第m车道中心线的切点为第3端点.通过第2端点,对x轴负坐标区域边缘点进行曲线拟合,从而假设该拟合曲线与y轴的交点为第3端点.
第4端点界定:通过第3端点,对x轴正坐标区域边缘点进行曲线拟合.作为该拟合曲线终点,第4端点横坐标为此区域内右转冲突分布点横坐标的最大值.
第5端点界定:通过第4端点画出城市道路垂线,以该垂线与x轴的交点为第5端点.
因此,第1端点坐标为(Wveh/2-W/2,0);第2端点坐标为(Wveh/2-W/2,Wl),Wl为城市道路单条车行道宽度(m);第3、4端点坐标均通过右转冲突分布的边缘点拟合曲线确定;第5端点坐标依据第4端点,以(x5,0)为第5端点坐标(m).
4.2 出入口下游功能区面积模型
如图3所示,在边界端点界定后,右转冲突区域划分为横坐标负值和正值区域.负值冲突区域是由直线x=Wveh/2-W/2、x轴、y轴和2、3端点间冲突分布点拟合曲线fm(x)围成的平面图形.积分得出负值冲突区域面积Am(m2)为

正值冲突区域是由x轴、y轴、x=x5和3、4端点间冲突分布点拟合曲线fz(x)围成的平面图形.积分得出正值冲突区域面积Az(m2)为

结合负值和正值冲突区域,计算出入口右转冲突区域面积A(m2)为
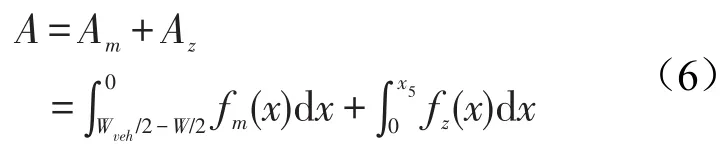
式(6)即出入口下游功能区面积模型.
5 实例分析
以某市杨桥路上青年广场机动车出入口为例进行试算及验证.杨桥路为对向分离的双向六车道城市道路,而青年广场为购物广场,设置有双向两车道的出入口道路.
5.1 实例出入口右转冲突坐标计算
如图2所示,设置青年广场出入口右转冲突区域实际坐标系.根据现场观测,设定l12=20m,WL=24.4m,从而给出各标定点实际坐标:第1标定点(0,0),第2标定点(20,0),第3标定点(0,12.2),第4标定点(20,12.2).在某日高峰时段17: 30~18:30,通过视频图像处理,给出各标定点图像坐标为:x1,p=245,y1,p=260;x2,p=44,y2,p=370;x3,p=342,y3,p=315;x4,p=123,y4,p=452.将标定点坐标代入式(3)得[C1,C2,C3,C4,C5,C6,C7,C8]T=[49.54,0.32,-0.41, -0.01,-0.02,265.71,-0.37,-0.67]T.在此基础上,根据式(1)和式(2),计算右转冲突分布点的实际坐标.
5.2 实例出入口下游功能区面积计算
(1)右转冲突区端点界定.
如图3所示,假设Wveh=1.8m,调查得W=15m,因此求出青年广场出入口右转冲突区域第1端点(-6.6,0).而杨桥路Wl=4.2m,故第2端点为(-6.6,4.2).然后将x轴负坐标区域边缘点拟合出曲线方程为fm(x)=-0.149 6x2+0.042 5x+11.003,计算出第3端点(0,11.003).在此基础上,将x轴正坐标区域边缘点拟合出曲线方程fz(x)=-0.009 1x2+0.513x+11.003,计算出第4端点(62.81,7.32).最后给出第5端点(62.81,0).
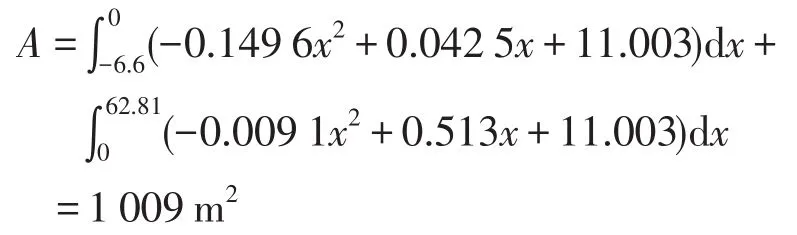
(2)下游功能区面积计算.
根据上述端点坐标和拟合曲线方程,负值冲突区由x=-6.6m,x=0,y=0和fm(x)=-0.149 6x2+0.042 5x+11.003等线段围成,正值冲突区由x=0,y=0,x=62.81m和 fz(x)=-0.009 1x2+0.513x+11.003等线段围成.
因此根据式(6),青年广场出入口下游功能区面积为
5.3 仿真验证
5.3.1 仿真评价指标研究
根据高峰时段实地调查,VISSIM仿真环境设定为:杨桥路双向交通量为4 528 pcu/h,期望车速为38 km/h;青年广场交通产生量为280 pcu/h,吸引量为50 pcu/h,其出入口道路期望车速为30 km/h.以出入口道路中心线上游20m位置为出行时间区域的固定检测起始点.然后以15m为步长,结合图3中第2、3、4端点位置,逐步沿城市道路下游方向设置10个检测终止点,从而构建10个出行时间区域.
出行时间区域从短到长依序编号为j(j=1, 2,…,10),则第j个出行时间区域单车平均延误增长率Δdj(s(/pcu·m))为

式中lj为第j个出行时间区域长度(m);d0=0;l0=0.
为观测出入口下游功能区影响下城市道路单车平均延误的演变规律,选定Δdj为仿真评价指标.
5.3.2 仿真结果分析
如表2所示,计算各出行时间区域的单车平均延误增长率.
表2中,13.4m、20m、83m出行时间区域的检测终止点分别对应图3中第2、3、4端点,即出入口下游功能区起始点、高峰点和终止点.分析表2可见,13.4~83 m范围内单车平均延误增长率较大,均大于0.1 s(/pcu·m).其中13.4~20m范围内单车平均延误增长率迅速增大,而20~83m范围内单车平均延误增长率逐渐减小.83~105m范围内单车平均延误增长率迅速减小至稳定数值.

表2 青年广场出入口下游城市道路延误Table 2 Qingnian Square access downstream streetdelay
如图3所示,出入口右转冲突分布密集,故其下游功能区交通延误较大;在第3端点位置右转冲突分布面最大,故此断面的交通延误影响存在峰值;相比3、4端点间拟合曲线,2、3端点间拟合曲线的切线斜率较大,导致横坐标负值区域的右转冲突分布面增大速度高于横坐标正值区域,因而交通延误影响呈现出先急剧增强后缓慢减弱的趋势;下游功能区以外区域不存在右转交通冲突,此时交通延误仅与城市道路自身交通流特征相关,故其数值较小且稳定.
由上述交通延误分析可见,本文给出的下游功能区形状较合理,符合了该区域面积的交通影响特性,因此基于该形状的出入口下游功能区面积模型有助于界定出入口下游影响范围.
6 研究结论
大型公建机动车出入口是影响城市道路交通顺畅的重要空间要素.对出入口交通影响区域的研究可提高城市道路交通组织合理性.国内外相关研究集中于出入口上游功能区长度建模,下游功能区面积计算方法尚不多见.
本文分析出入口下游功能区面积的交通影响特性,然后采用摄影测量法,给出基于右转冲突分布点坐标计算的右转冲突区域测量方法,进而通过右转冲突区域端点界定,确定出入口下游功能区面积模型.以单车平均延误增长率为评价指标,实例仿真评价结果可见:相比出入口下游其它城市道路区域,下游功能区交通延误数值较大且存在峰值,可吻合所得功能区分布形状,与出入口下游功能区面积的交通影响特性一致.因此通过右转冲突区域形状分析,提出的出入口下游功能区面积模型有助于出入口影响区域定量化计算.然而本文提出的右转冲突区域端点界定方法依据实地观测,有待进一步理论验证.
[1]卓曦,张宁,钱振东.大型公建对向机动车出入口间距计算及优选[J].交通运输工程学报,2010,10(4):71-78.[ZHUO X,ZHANG N,QIAN Z D.Spacing calculation and selection on opposite vehicle access of large public building[J].Journal of Traffic and Transportation Engineering,2010,10(4):71-78.]
[2]Gluck J,Levinson H S,Stover V.Impacts of access management techniques(NCHRP Report 420)[R]. Washington,DC:National Academy Press,1999.
[3]Jerome S G,Greg H,Jamal M.Driveway spacing and traffic operations[C]//TRB,eds.Proceedings of the Urban Street Symposium.Washington,DC: Transportation Research Board,2000.
[4]Gattis J L,Gluck JS,Barlow JM,et al.Guide for the geometric design of driveways[R].Washington,DC: Transportation Research Board,2010.
[5]卓曦,钱振东,张宁.大型公共建筑同向机动车出入口间距计算[J].东南大学学报(自然科学版),2012,42(3):560-564.[ZHUO X,QIAN ZD,ZHANG N.Spacing calculation for same-side vehicle access of large public building[J].Journal of Southeast University (Natural Science Edition),2012,42(3):560-564.]
[6]沈家军,王炜.基于摄影测量原理的道路交叉口机非冲突区域界定[J].扬州大学学报,2010,13(1):75-78.[SHEN JJ,WANGW.Study on themotor and nonmotormixed traffic conflict zone of urban intersections based on photogrammetry[J].Journal of Yangzhou University(Natural Science Edition),2010,13(1):75-78.]
Size Calcu lation for Vehicle Access Downstream Functional A rea of Large Pub lic Building
ZHUO Xi1,ZHENG Ke1,LUYin-feng2
(1.Schoolof Civil Engineering,Fuzhou University,Fuzhou 350108,China;2.GuangxiElectric Power Industry Investigation Design and Research Institute,Nanning 530023,China)
To quantify the vehicleaccess traffic impactareaof large public buildings,assuming access rightturn traffic conflict area as its downstream functional area,traffic impact characteristics of access downstream functional area size are analyzed.Further,with follow ing right-turn vehicle location in traffic conflicts taken as the right-turn conflict distribution point,access right-turn conflict distribution point real coordinate formulas based on the photogrammetry method are proposed,in order tomeasure the right-turn conflict area.Then through curve fitting right-turn conflict coordinate points,boundary points of right-turn conflict area are defined,so that the access downstream functional area sizemodel is determ ined.Finally, one large public building vehicle access is taken as an example for result trial calculation and simulation validation.Verification results show that,urban street traffic delay in the access downstream functional area has the large value,and delay values have rapid increase and slow decrease changing states successively, which fits the right-turn conflict area shape and size features.Therefore access functional area size model based on the right-turn conflictarea shape could define the large public building access impactarea,which is good forurban streetm icroscopic traffic organization optim ization.
traffic engineering;functional area size;traffic conflict;access;photogrammetry method; large public building
1009-6744(2015)03-0166-06
U491
A
2014-10-28
2015-03-29录用日期:2015-04-07
国家自然科学基金资助项目(51308126);福州大学科技发展基金资助项目(2014-XY-25);福州大学科研启动项目(0460-022579).
卓曦(1982-),男,福建福安人,讲师,博士.*通信作者:zh99k@163.com
