高性能伺服系统电流环关键技术研究
2015-07-18赵志勇于东王志成
赵志勇,于东,王志成
(1.中国科学院大学北京100049;2.中国科学院沈阳计算技术研究所高档数控国家工程研究中心,辽宁沈阳110168;3.沈阳高精数控技术有限公司,辽宁沈阳110168)
高性能伺服系统电流环关键技术研究
赵志勇1,2,于东2,3,王志成2,3
(1.中国科学院大学北京100049;2.中国科学院沈阳计算技术研究所高档数控国家工程研究中心,辽宁沈阳110168;3.沈阳高精数控技术有限公司,辽宁沈阳110168)
电流环是影响整个永磁同步电机伺服系统控制性能的核心,而其控制品质由多种因素决定。在永磁同步电机矢量控制电流环控制模型基础上,通过对影响电流环性能的多种因素进行综合分析和研究,提出了抗噪声的电流采样优化策略和抗反电势干扰的控制优化策略。理论分析和实验结果表明,所提方案能有效克服噪声和反电势的干扰,提高电流环的动态性能。
永磁同步电机;电流环;电流采样;控制策略
永磁同步电机以其高效率、高功率密度、小转动惯量等优点,在伺服系统中得到广泛的应用[1]。目前永磁同步电机伺服系统大多采用3环控制结构,内环为电流环,外环为速度环和位置环。为保证对位置和速度指令的快速跟踪,要求电流环具有快速的电磁转矩响应,电流环的动态响应影响整个伺服系统的性能。
影响电流环性能的因素有很多,主要包括反电势干扰、环内延时、控制方法和控制参数[2]。在控制系统中,由于延时使控制量不能立即作用会造成系统的超调或失控。电流环内的总延时与电流的采样和PWM更新方法有关。文献[3]提出的单周期双采样方法提高了系统的带宽,但是没有考虑到实际系统中电流滤波带来的相位延迟。文献[4]建议用采样平均值的方法采样不连续的电压信号。积分作用能有效抑制噪声,因此考虑将平均采样引入永磁同步电机的电流采样中来。
反电势是电流环的主要干扰,文献[5-6]通过辨识参数,用前馈补偿的方式抵消反电势的干扰。尽管各种先进的控制策略如滞环控制[7-8],预测控制[9-10]等被用在电流环控制中,但是PID以其简单、鲁棒性可靠性高的优点,仍然是应用最广泛的控制方法。目前电流环PID参数整定策略是根据工程最优将系统整定为典型I型系统[11]。文献[5-6,11]的分析建立在将反电势作为外部干扰的数学模型的基础上,将克服反电势和控制参数整定作为两个独立问题分别解决。但是影响电流环的这些因素并不独立,因此考虑对伺服控制系统的数学模型进行等效变换,将反电势引入电流控制闭环,在新模型上进行分析设计,这样可以同时解决这两个问题。
本文首先建立电流环控制模型,分析影响电流环性能的关键因素,在此基础上研究电流采样策略;然后在不忽略反电势情况下,设计新的控制方法和参数;最后用仿真和实验验证分析的正确性。
1 电流环性能影响因素分析
1.1 永磁同步电机电流环控制结构
永磁同步电机是个多变量、强耦合、非线性的系统,为简化分析便于研究,做以下假设:
1)忽略铁心饱和;
2)忽略电机的涡流损耗和磁滞损耗;
3)永磁体无阻尼作用,且转子上也没有阻尼绕组;
4)反电动势是正弦的。永磁同步电动机在同步旋转坐标系下的数学模型如下:
式中:udq,udq,id,iq,Ld,Lq分别为定子绕组dq轴上的等效电压、电流和电感分量;R为定子电枢绕组电阻;Ψf为转子永磁体的磁链;ω为电角速度;Te为电磁转矩;p为磁极对数;Tl为负载转矩;J为转动惯量;B为粘滞摩擦系数;Ω为转子角速度。
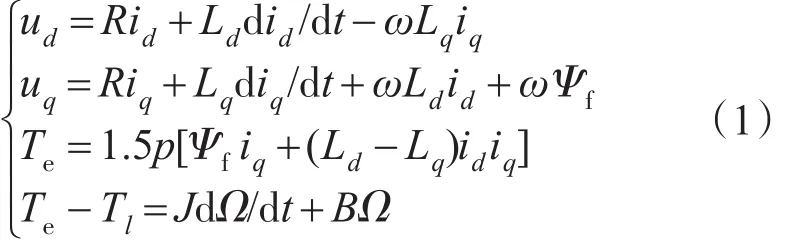
在式(1)的模型下,分别控制dq轴电流,实现对转矩和励磁的解耦控制。采用id=0的矢量控制框图如图1所示。
直轴电流控制环是辅助控制环,电流环主要研究的是交轴电流控制环。将系统中小延时环节等效为一阶惯性环节:
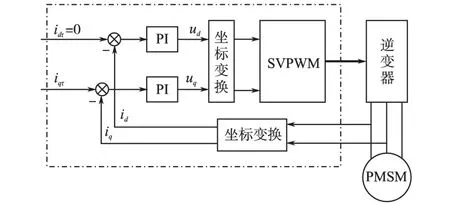
图1 电流环组成框图Fig.1 Structure diagram of current control loop

得到电流环的数学模型如图2所示。

图2 电流环数学模型Fig.2 Mathematical model of current control loop
1.2 电流环性能影响因素分析和总结
多因素综合影响电流环性能,其中影响最为显著的包括电流调节器控制方法和参数、环内延时和反电势干扰。
在以数字处理器为核心的伺服系统中,电流采样和PWM更新等因素不可避免的引入延时。环路中延时主要包括PWM更新延时、采样和滤波延时。电流采样方式决定系统中的主要延时。
从电机数学模型可知,反电势与电机转速成正比。反电势干扰在控制环前向通道上,如果反电势变化远小于电流的调节速度,反馈控制能很好地克服该干扰。但是在伺服系统中,电机通常具有很小的转动惯量,速度的快速变化给电流环带来大量干扰,因此反电势的影响必须要考虑。
控制算法是控制系统的灵魂,合适的方法和参数才能得到稳定可靠的系统。控制器参数决定控制器性能。参数的选择与系统的模型和要求的控制指标有关。
在实际控制闭环中,这些因素相互关联相互影响。电流采样方式决定系统模型参数,进而影响控制器的参数。合适的控制策略和参数能有效抑制反电势干扰。因此本文从电流采样优化、控制策略改进2个方面进行研究,以提高电流环整体性能。
2 电流采样优化策略
2.1 采样瞬时值
SVPWM的原理就是在一个载波周期内,通过控制2个相邻电压矢量Ux和Ux±60的导通时间得到要求的电压矢量:

文献[12]阐述了在零矢量时间的中点,电流纹波过零,而三角波的峰值时刻就是零矢量中点,因此在时刻

可以采样到电流信号的无纹波瞬时值。采样电流瞬时值时序如图3所示。
图3 采样电流瞬时值时序Fig.3 Sequence of sampling instantaneous current
如果不考虑滤波延时,PWM的更新延时Ts,死区时间Tpwm,电流环延时Td值如下式:
2.2 采样平均值
电流在一个载波周期的平均值定义为

在一个周期的平均值可以近似为在周期中点采样的基波值,即i[(k+1)T]=iˉk。
在硬件实现时,可以在一个周期内多次采样求和近似积分。目前高性能的DSP完全能胜任,DSP上的A/D转换器一般都具有多通道,如图4所示。以TMS320F28335为例,其A/D控制器一共有16个通道,将其设置为不间断自动定序模式,可以实现16个通道连续采样。在快速采样模式下,TMS320F28335片上A/D采样率高达6.25MSPS而SVPWM的载波频率通常为10 kHz,这样A/D能在一个载波周期内采样到足够多的数据[13]。
采用这种采样方式,PWM占空比在一个周期结束时刻更新,在下个载波周期结束生效。采样时序如图5所示。
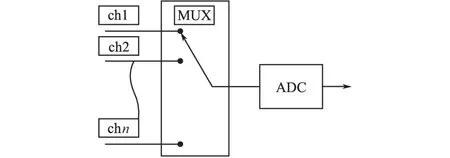
图4 多通道A/D转换器Fig.4 Multi⁃channel A/D converter
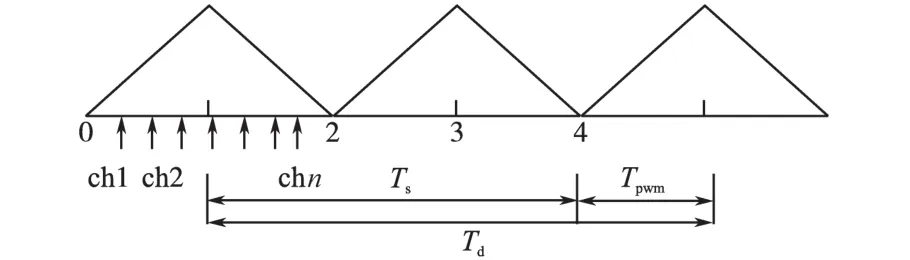
图5 采样电流平均值时序图Fig.5 Sequence of sampling average current
各延时时间值如下式:

考虑到系统中的噪声,电流会在采样前滤波处理。滤波会引起信号相位延迟,因此实际上瞬时采样和平均采样之间延时差异并不会如此之大;加之积分作用能很好地抑制谐波和噪声干扰,因此实际中平均采样策略更适合信号不连续,较多噪声的场合。
3 抗反电势干扰的控制策略
上述电流采样策略决定了系统内的延时。反电势在环路的前向通道,合适的控制策略和参数能够抑制反电势干扰。因此考虑将反电势引入闭环,设计新的控制方法。
3.1 工程最优

在图2中,如果将Udis看作电流环的干扰信号,则其开环传递函数如下式:由于Td≪TRL,选择用调节器零点对消主导极点。相消后系统的闭环传递函数是典型的Ⅱ阶系统。选择系统阻尼系数为得:
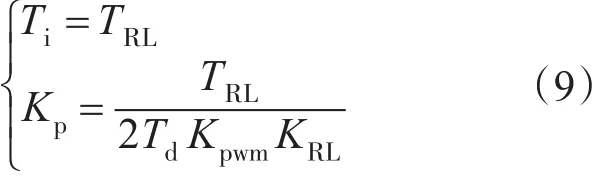
整定后系统的开环传递函数为

根据式(9)整定的PI参数,系统对输入参考信号有很好的响应,因为积分时间抵消掉了系统大的电气时间常数。正是这样,大的积分时间导致弱的积分作用,系统对Udis扰动的响应相对较弱。
3.2 改进的控制方法
忽略反电势影响,将系统整定成最优二阶系统的方法有两个缺点:1)整定的参数不能很好地克服干扰;2)伺服系统为得到很好的速度响应,采用的伺服电机通常具有很小的机械时间常数,转速的快速变化给电流环带来大量的扰动,反电势的影响不能忽略[14]。
由于B通常非常小,Tl的变化相对缓慢,为简化分析,忽略这些因素。TRL≫Td,在系统截止频率附近有||jωTRL≫1,因此用积分环节近似惯性环节得:

考虑反电势的电流控制框图如图6所示。
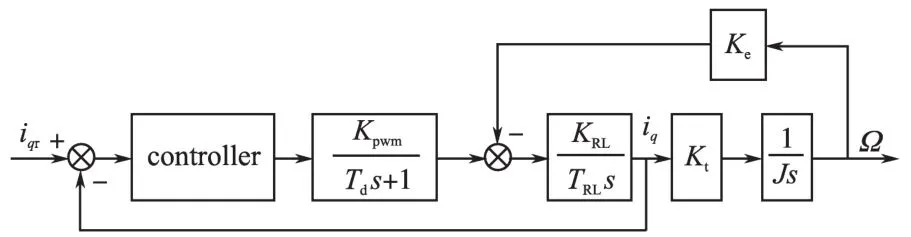
图6 考虑反电势的电流环控制框图Fig.6 Block diagram of current loop control involving EMF
对图6等效变换的电流环控制模型如图7所示,其中Tm=KeKtKRL/J。

图7 简化后的电流环控制模型Fig.7 Simplified model of current loop control
在图7中电流环控制对象的传递函数是二阶系统且分子中含有微分项,普通的PI控制一定会有稳态误差。根据工程设计中常用的相消原理,将普通积分环节改为二次积分以抵消分母的二次多项式,新的控制器传递函数为

此时系统开环传递函数为

选择Ti值抵消掉分母的二次项,取系统阻尼系数为得:
整定后系统开环传递函数为

两种方法最终都是将电流环整定为如式(15)所示的系统,而且比例控制参数也相同。第1种方法忽略反电势干扰,而第2种方法在将反电势引入控制环后,为消除稳态误差引入双积分环节。
4 仿真与实验
在Matlab/Simulink中搭建永磁同步电机矢量控制仿真图,为测试两种电流采样方式的抗噪声干扰性能,在原始电流中加入高斯白噪声,对比加入前后两种采样方式得到的电流信号。图8a显示在未加入噪声前,两种采样策略都能很好地得到电流基波信号;加入噪声后,见图8b,瞬时采样的电流波形出现明显的畸变,但是平均采样仍然能得到平滑信号,因此平均采样能提高系统的抗噪声干扰能力。
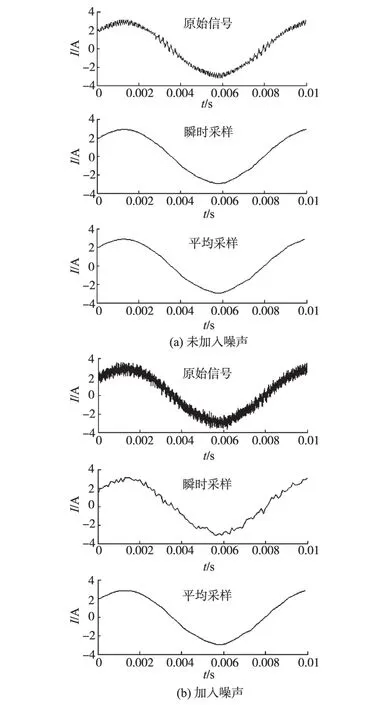
图8 电流波形Fig.8 Current waveforms
在实际伺服系统对控制算法进行实验验证。试验中对电机进行直线加减速,测量电流的给定和反馈电流信号,得到实验结果如图9所示。
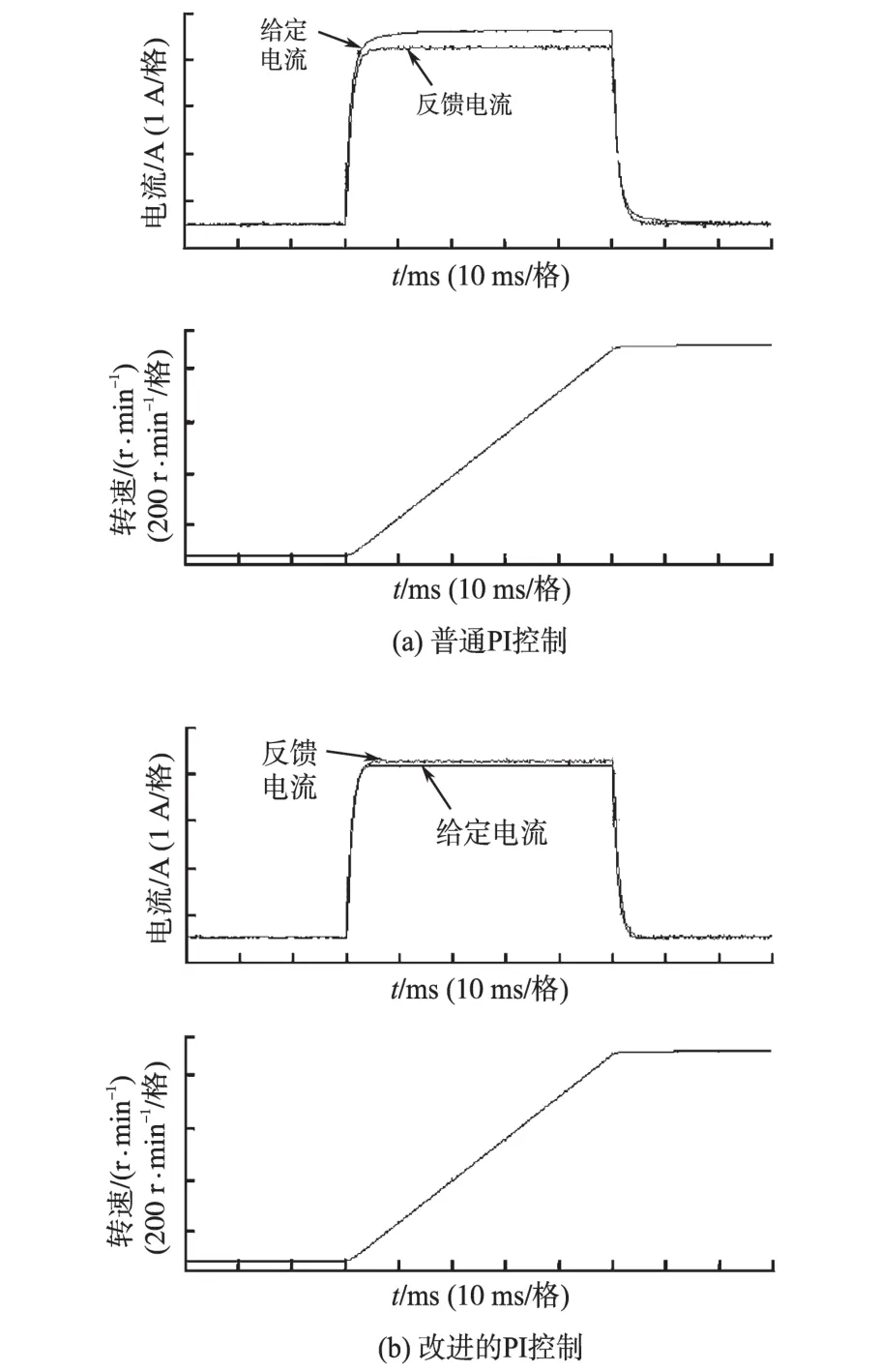
图9 电流和转速动态波形Fig.9 Dynamic waveforms of current and rotation rate
从图9中可以看出,当电机转速稳定时,无反电势的干扰,电流信号都能跟踪给定。当电机在直线加速过程中,转速的快速变化给电流环带来大量反电势干扰,此时传统的控制中,电流反馈和给定出现了明显的误差,而改进的控制方法却仍能做到接近无差的跟踪。
5 结论
本文对高性能永磁同步伺服系统电流环中的若干关键技术进行了研究。首先,对影响电流环性能的因素进行分析和总结;其次,提出了平均采样的电流采样策略,该方法能有效抑制噪声干扰;最后,在考虑反电势的条件下,建立了新电流控制环的模型,提出了比例双积分控制并整定了控制器参数。仿真和实验表明,本文所提方案能有效抑制噪声和反电势干扰,提高了电流环的动态响应。
[1]李烨,严欣严.永磁同步电动机伺服系统研究现状及应用前景[J].微电机,2001,34(4):30-33.
[2]陈荣,邓智泉,严仰光.永磁同步伺服系统电流环的设计[J].南京航空航天大学学报,2004,36(2):220-225.
[3]王宏佳,杨明,牛里,等.永磁交流伺服系统电流环带宽扩展研究[J].中国电机工程学报,2010(12):56-62.
[4]Blasko V,Kaura V,Niewiadomski W.Sampling of Discontin⁃uous Voltage and Current Signals in Electrical Drives:A Sys⁃tem Approach[J].Industry Applications,IEEE Transactions on,1998,34(5):1123-1130.
[5]徐东,王田苗,刘敬猛,等.基于参数辨识的永磁同步电机电流精确控制方法[J].电力自动化设备,2009,28(11):30-35.
[6]郭希铮,游小杰,王晓丹.永磁同步电机电流调节器动态特性改进方法分析[J].电力自动化设备,2011,31(6):39-44.
[7]Cortes P,Kazmierkowski M P,Kennel R M,et al.Predictive Control in Power Electronics and Drives[J].Industrial Elec⁃tronics,IEEE Transactions on,2008,55(12):4312-4324.
[8]Moon H T,Kim H S,Youn M J.A Discrete⁃time Predictive Current Control for PMSM[J].IEEE Transactions on Power Electronics,2003,18(1):464-472.
[9]Bose B K.An Adaptive Hysteresis⁃band Current Control Tech⁃nique of a Voltage⁃fed PWM Inverter for Machine Drive Sys⁃tem[J].Industrial Electronics,IEEE Transactions on,1990,37(5):402-408.
[10]陈先锋,舒志兵,赵英凯.基于矢量控制的PMSM位置伺服系统电流滞环控制仿真分析[J].电气传动,2006,36(6):19-22.
[11]仇国庆,罗宣林,王平,等.PMSM伺服系统的PID控制器设计及仿真[J].重庆大学学报,2008,31(3):259-262.
[12]Blasko V.Analysis of A Hybrid PWM Based on Modified Space⁃vector and Triangle⁃comparison Methods[J].Industry Applications,IEEE Transactions on,1997,33(3):756-764.
[13]Texas Instruments.TMS320x2833x Analog⁃to⁃digital Converter(ADC)ModuleReferenceGuide[EB/OL].[2007-10-12].Http:// www.ti.com/lit/ug/spru812a/spru812a.pdf
[14]杨明,牛里,王宏佳,等.微小转动惯量永磁同步电机电流环动态特性的研究[J].电机与控制学报,2009,13(6):844-849.
Research on Key Techniques of Current Loop in High⁃performance Servo System
ZHAO Zhi⁃yong1,2,YU Dong2,3,WANG Zhi⁃cheng2,3
(1.University of Chinese Academy of Sciences,Beijing 100049,China;2.National Engineering Research Center for High⁃end CNC,Shenyang Institute of Computing Technology,Chinese Academy of Sciences,Shenyang 110168,Liaoning,China;3.Shenyang Golding NC Tech.Co.,Ltd.,Shenyang 110168,Liaoning,China)
Current loop whose control quality depends on multiple factors has a great influence on the performance of a permanent magnet synchromous motor(PMSM)servo system.Dominant factors that affected the control quality were analyzed based on current loop control model of PMSM vector control.An anti⁃noise current sampling optimized method and a new control optimized method which was resistant to back EMF disturbance were proposed.Through theoretical analysis and experiment,the proposed methods can effectively restrain the disturbance from noise and back EMF,which improve the dynamic performance of current loop.
permanent magnet synchromous motor(PMSM);current loop;current sampling;control method
TM351
A
2014-08-23
修改稿日期:2015-02-05
国家科技重大专项(2013ZX04007-011)
赵志勇(1991-),男,硕士研究生,Email:hnsxyzzy@126.com
