一种四旋翼两栖机器人的设计分析*
2015-07-18徐博达于丹阳赵宏伟杨宇恒李佳思
徐博达,于丹阳,赵宏伟,杨宇恒,任 帅,李佳思
(吉林大学 机械科学与工程学院,吉林 长春 130022)
一种四旋翼两栖机器人的设计分析*
徐博达,于丹阳,赵宏伟,杨宇恒,任 帅,李佳思
(吉林大学 机械科学与工程学院,吉林 长春 130022)
随着科学技术的发展,机器人技术得到普遍重视和广泛应用。结合陆地、空间两栖机器人的特定需求,设计了一种四旋翼两栖机器人,针对机器人飞行特点和路面运动特性,研究了其工作机理,结合Pro/E软件对机器人进行了建模分析,通过ANSYS软件对机器人关键部件进行了静力学分析研究,对机器人和新结构进行了试制加工,并进行了模态试验分析。结合控制系统策略和主要传感器对机器人运动状态的实时反馈,提出了机器人的主要运动模式和控制策略。设计的机器人具有结构轻巧、控制方便和适合复杂工作环境等特点,在特殊环境勘察和灾害探测等领域具有重要应用前景。
四旋翼;两栖机器人;静力学分析;运动模式;模态分析
当前国内四旋翼飞行器刚刚起步,发展比较缓慢,目前已有的四旋翼飞行器还是以玩具为主,载重小,质量大,无实际应用价值,所以多功能、多用途的新型四旋翼机器人有很大的发展空间。四旋翼飞行器发展了近1个世纪,从原来机械时代(直径十几米、高几米的庞然大物)发展到当今电子时代(直径几十厘米甚至更小的微型“碟形”飞行器),其实用性也从原来单纯的运载工具,发展为现在集军用、商用和民用多位一体的无人驾驶工具。目前,国内的四旋翼飞行器的发展还处于初级阶段,缺乏独自的核心技术,能应用于专业领域的相关产品还未大批量生产。国外的四旋翼领域因拥有悠久的科学文化历史和研发团体机构,加快了多旋翼飞行器的发展。欧美发达国家四旋翼飞行器已投入了商业和军事领域,获得了显著的效果[1-2]。
目前,四旋翼飞行器在军事、救援和勘测等方面具有独特优越性,所以,大力发展多旋翼飞行器将会成为趋势,在如人质救援和矿洞勘测等危险环境中,又急需多功能、多用途、体积小和载重大的新型两栖四旋翼机器人。目前,市场前景乐观,是国内、外军方,科研以及其他团队研究的热点。
基于软件Pro/E和ADAMS的联合仿真技术的新型四旋翼机器人拥有载重大、材质轻、体积小和两栖操作性强的特点,并且具有图像传输等多功能用途,其涵盖了巨大经济和社会意义,具有很好的推广应用前景。
1 新型四旋翼两栖机器人的设计研究
本文将研究一种新型四旋翼两栖机器人的结构。它可以应用于紧急时刻的救援搜索和在不便于人出没的地方进行勘探等地质工作。例如,在有积水的坍塌矿洞和陆空两栖,且特别适合在有毒有害气体、核物质泄漏等特殊场合应用。而在人质救援中,异常明显的空中侦察又显得过于显眼,所以当其飞到特定位置,进行地面图像传输无疑是最好的选择。
1.1 新型四旋翼两栖机器人的工作原理
本文研究四旋翼两栖机器人的目的是为解决人类生活和工作环境中,一些不便于人类直接操作、劳动强度大、工作繁琐、危险性高和工作质量差等问题。
四旋翼两栖机器人是一种结构新颖、紧凑的双模式探测装置。四旋翼两栖机器人在爬行状态检测到障碍物时,会通过调节足部伺服电动机实现前进、后退或是转弯;当检测到矮的障碍物时,会通过腿部关节的伺服电动机实现抬腿和收缩功能。在飞行模式下,四旋翼飞行器主要是通过改变4个电动机的转速来调节螺旋浆的转速,由旋翼升力的变化实现对飞行器的控制。四旋翼飞行器能够垂直起降,自由悬停,可适应各种速度及各种飞行剖面航路的飞行状况。这些优势决定了四旋翼飞行器具有广泛的应用范围,可以实现在紧急时刻的救援搜索,在不便于人出没的地方进行勘探等地质工作[3-4]。
1.2 新型四旋翼两栖机器人的结构设计
新型四旋翼两栖机器人由四旋翼飞行器机构、控制机构、地面行走机构和信息采集机构等4部分组成。
1.2.1 四旋翼飞行器机构
四旋翼飞行器机构是由旋翼、4个伺服电动机和机架组成,如图1和图2所示。旋翼是由2个互成角度的金属片通过1个短轴连接而成。该旋翼采用耐磨轻质合金材料制成[5],大大减小了自身质量。其表面经过耐高温处理,在空中高速旋转与空气极速摩擦时能够承受高温。4个伺服电动机均采用相同的高精度无刷直流电动机,能够精确地按照控制系统发出的信息带动旋翼按指定旋向旋转。机架采用工程塑料通过3D打印技术制成。机架4个角为圆环形的镂空结构,其直径比旋翼的最大长度稍大,在每个圆环中间有电动机安装凹槽。4个电动机安装在机架4角的圆环中心凹槽内。4个旋翼分别安装在4个电动机轴上。
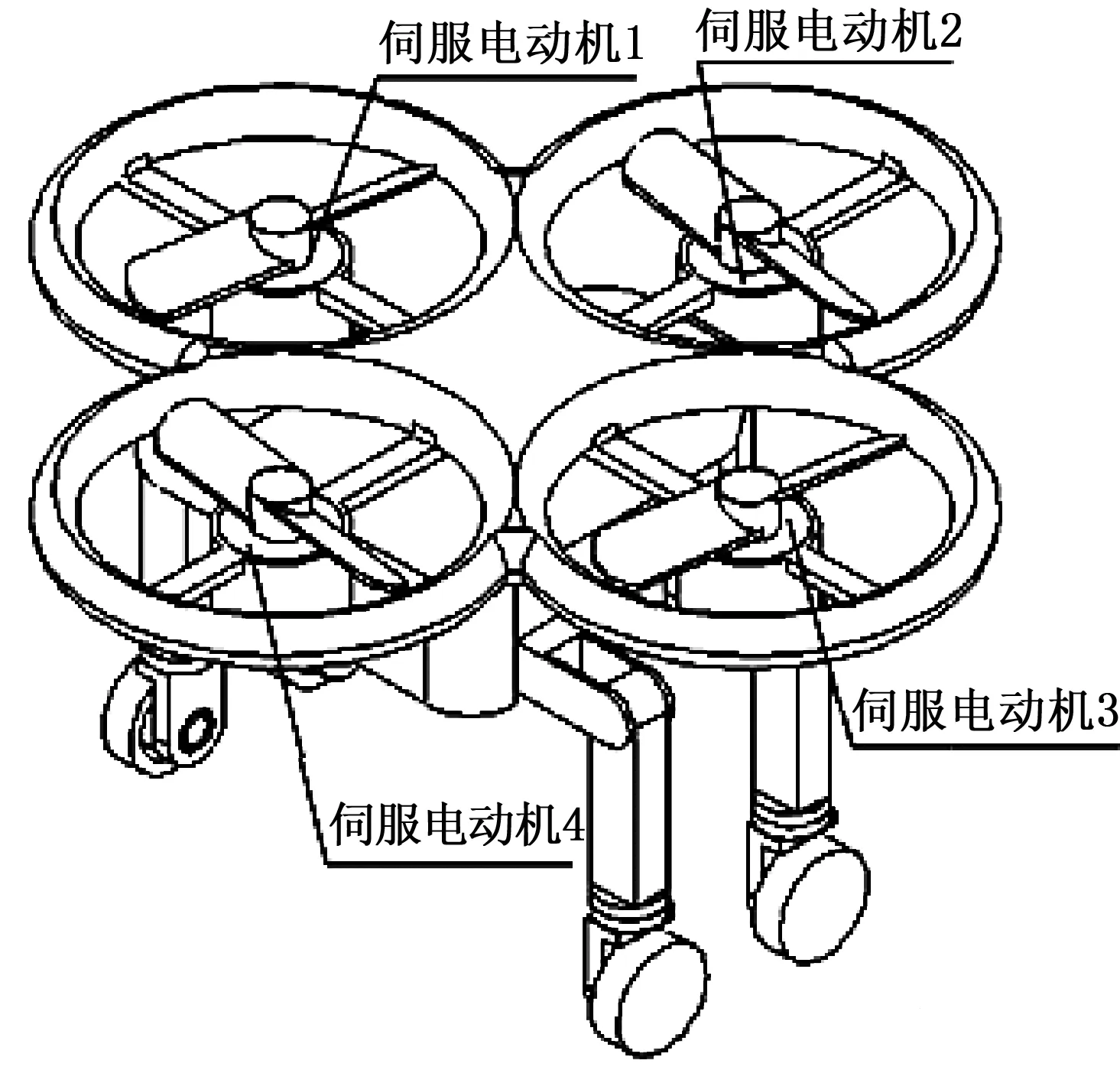
图1 四旋翼飞行器机构示意图
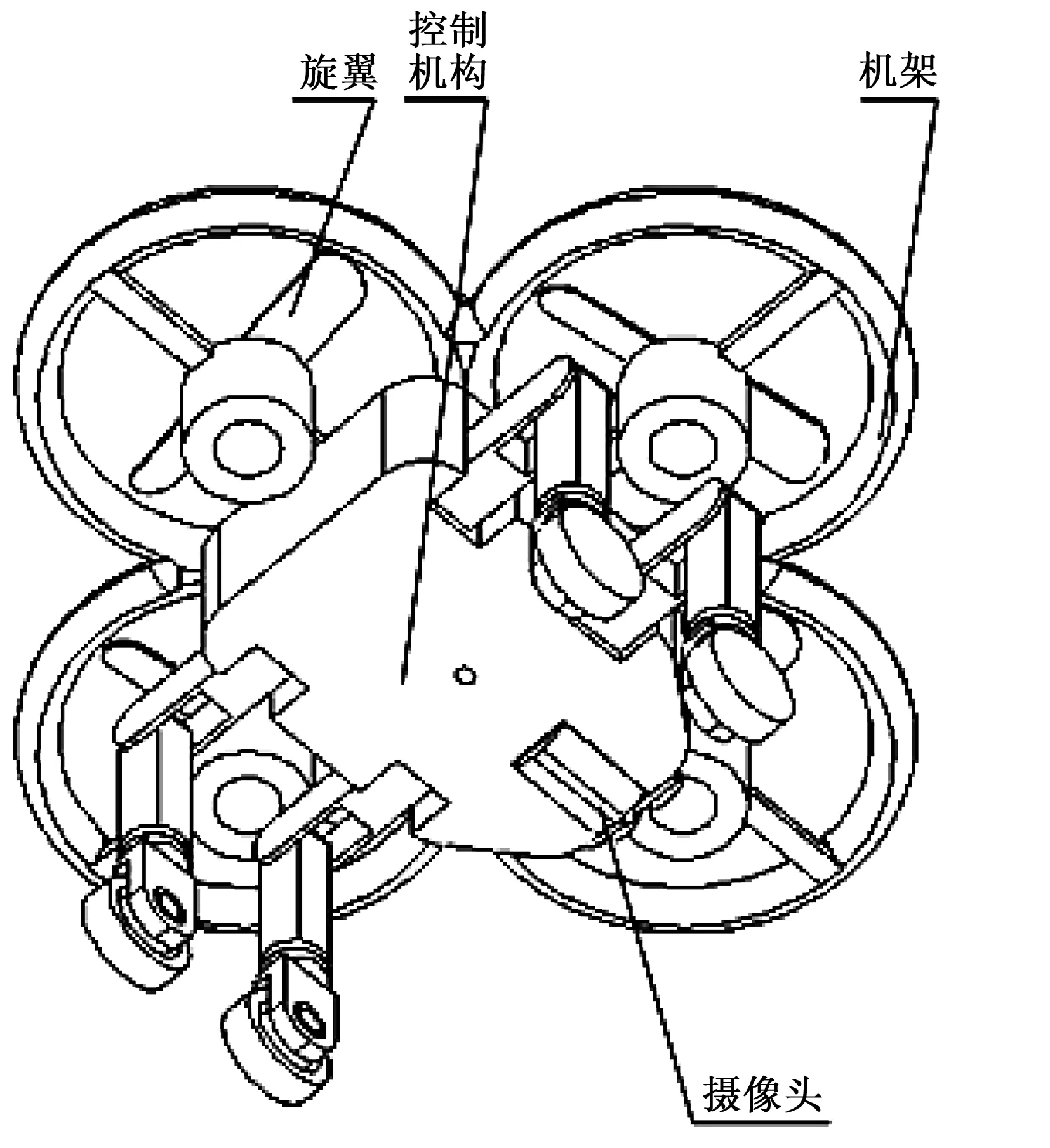
图2 四旋翼飞行器底面示意图
1.2.2 控制机构
控制机构(见图2)装有高蓄能电池、小型PLC控制系统及各种模拟量模块。
1.2.3 信息采集机构
信息采集机构由机载部分和无线传输系统组成。机载部分包括微型摄像头及视频发射器。与传统的摄像及传输系统相比,该系统的机载部分采用了集成度高、耗电低的电子元器件,并实现了微型化。该系统通过微型摄像头拍摄地面的情况,并由视频发射器将视频信号实时发送回地面,从而实现对机器人所飞过地区的实时监视。
1.2.4 地面行走机构

图3 四旋翼机器人腿部示意图
地面行走机构是四旋翼两栖机器人用来在陆地行走时实现快速平移和转向的机构。它是由4条相同的腿组成,每条腿都是由腿支架和足组成。腿支架模仿螃蟹的足部结构,由大腿支架、小腿支架和微型销轴电动机组成。大腿支架和小腿支架通过微型销轴电动机连接在一起,如图3所示。微型销轴电动机的磁极固定在小腿支架下端的孔内,微型销轴电动机的线圈绕在大腿支架的中心轴上,这样就组成小腿支架直驱式的微型销轴电动机。

图4 轮毂电动机结构示意图
足由支座、无刷轮毂电动机和小轮组成。轮毂电动机结构示意图如图4所示。支座上端与小腿支架下端连接,其下端是扁平状的结构,在下端中部钻有圆形的轴承座孔。在支座下端扁平状结构外表面上固定有圆环形磁极。小轮是短圆柱形状,内侧开有圆环槽,其中心主轴上绕有轮毂电动机的线圈。深沟球轴承安装在支座下端中心圆形的轴承座孔内,小轮的中心轴安装在深沟球轴承孔内,这样支座与小轮组成无刷直驱轮毂电动机,该结构大大消除了传动式的损耗。为减小该机器人的质量,本设计不采用直接安装机械制动系统的方式,而是通过反转电流方向来达到快速制动的效果,或通过改变线圈接法而为电源充电,从而达到缓慢减速及能量回收的目的。每个轮毂电动机直接受控于控制系统的闭环反馈调节控制,所述足通过支座与小腿支架下端固连在一起。
1.3 机架结构力学性能仿真与分析

图5 机架结构三维模型
机架作为整个装置的支承部件,既要承受飞行器在飞行模式下的静动载荷,同时又作为飞行器的负载,因此要求其在满足结构刚强度性能要求的同时,应尽可能降低质量;为此,需要对其结构进行优化设计。首先,根据机架在实际飞行过程中的受力情况,按照力学原理,设计并绘制出(利用Pro/E软件)机架的三维模型;然后,应用ANSYS软件,对其结构进行静力分析和模态分析。根据分析结果,对机架结构进行优化,设计出质轻并符合力学性能要求的机架模型。为了验证仿真分析结果的正确性,本文利用3D打印技术,打印出机架支承臂实物模型,并对其进行模态性能试验,试验结果与有限元分析结果较为吻合,最终可以认为设计的机架模型能够满足性能要求。
利用Pro/E软件设计并优化后的机架三维模型如图5所示,其密度取为1.1×103kg/m3,质量为276 g。
2 新型四旋翼两栖机器人的静力分析
本文对四旋翼两栖机器人的主要承力构件——旋翼支承臂进行ANSYS静力和模态分析,并对分析结果进行试验验证。
2.1 定义材料属性
由于机架结构较为复杂,采用传统的塑料模具注射的方法成本较高;因此,本文采用一种新的加工方法——3D打印,以工程塑料PLA为原料,打印出设计所需形状。查资料可知,其弹性模量为1.9×103MPa,密度为1.1×103kg/m3,泊松比为0.394。
2.2 划分网格
自由网格划分方法,最终生成的网格划分图形如图6所示,其节点数为90 840,单元数为48 961。

图6 网格划分结果
2.3 施加载荷和约束
在实际飞行过程中,机架主要承力部件——旋翼支承臂的根部承受地面行走机构、电池和自身等的重力载荷,旋翼支承处承受旋翼的升力、旋转电动机的转矩和电动机转子的振动载荷。设计的飞行器能够承受2 kg的重物,则其中一个旋翼支承臂承受的重物质量为0.5 kg。根据空气动力学原理,载重0.5 kg进行向上飞行(1g的加速度),支承臂所承受的电动机旋转反转矩大约为0.26 N·m;因此,在ANSYS软件分析中,将支承臂大端固定,小端承受10 N的上升力和0.26 N·m的侧向转矩。具体施加载荷、约束的位置和大小如图7所示。

图7 载荷和约束添加位置
2.4 结果后处理
静力分析结果如图8所示,结构承受的最大应力为4.6 MPa,远小于材料的屈服强度。

图8 静力分析结果
3 新型四旋翼两栖机器人的模态分析
对支承臂进行模态分析,在支承臂小端放置0.5 kg的质量点,以模拟臂在振动过程中的实际受力情况。取分析结果中的前两阶模态,其模态固有频率为103.71和259.97 Hz,对应的模态振型分别如图9和图10所示。

图9 一阶模态振型(103.71 Hz)
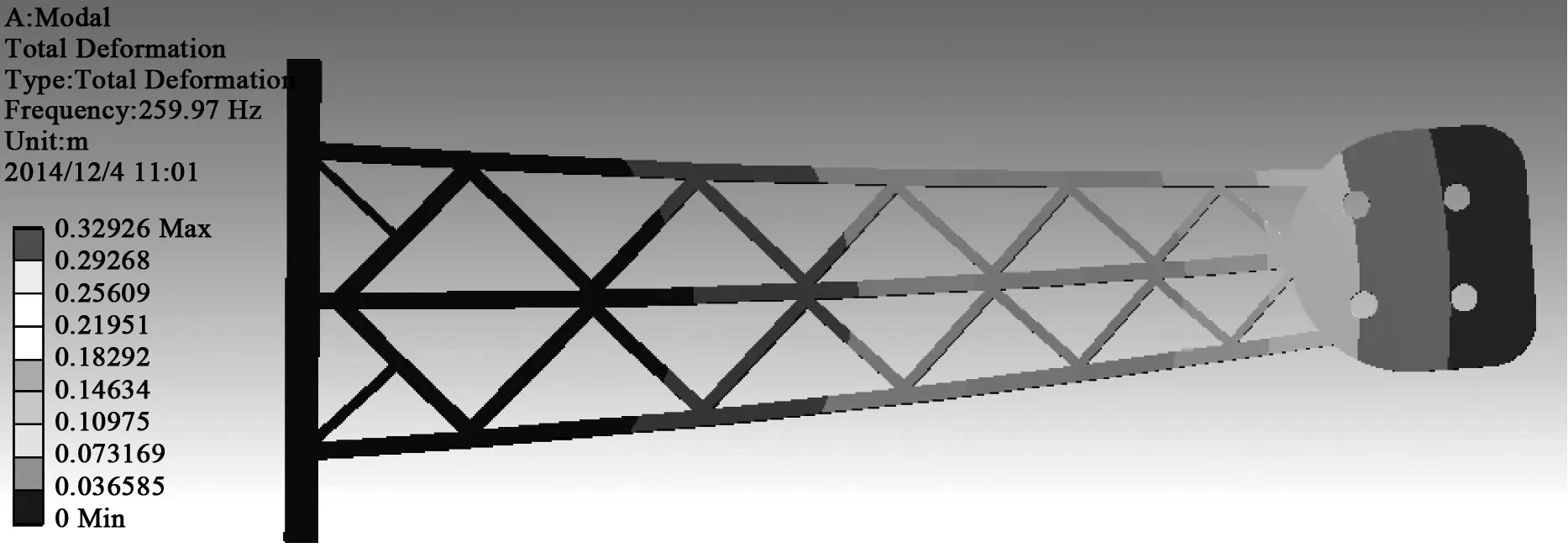
图10 二阶模态振型(259.97 Hz)
4 新型四旋翼两栖机器人的试验验证
采用型号为CF-7200A的便携式傅里叶分析仪,在机架的末端受力处放置加速度传感器,用力锤敲击机架的固定端,分析仪采集并实时处理加速度传感器的信号,绘制出每次敲击所产生的功率谱密度函数曲线,如此反复数次,记下每次分析的结果,对比分析各结果数据,就能得出机架的各阶模态对应的频率。试验测试分析装置如图11所示。一阶模态振型对应频率测试试验的加速度传感器放置位置如图12所示,分析结果如图13所示。二阶模态振型对应频率测试试验的加速度传感器放置位置如图14所示,分析结果如图15所示。
观察功率谱密度函数曲线,得出该支承臂结构的1阶模态固有频率试验结果为112 Hz,与仿真分析结果相差:

(1)
二阶模态固有频率试验结果为282 Hz,与仿真分析结果相差:

(2)

图11 试验测试分析装置

图12 一阶模态振型对应频率测试试验
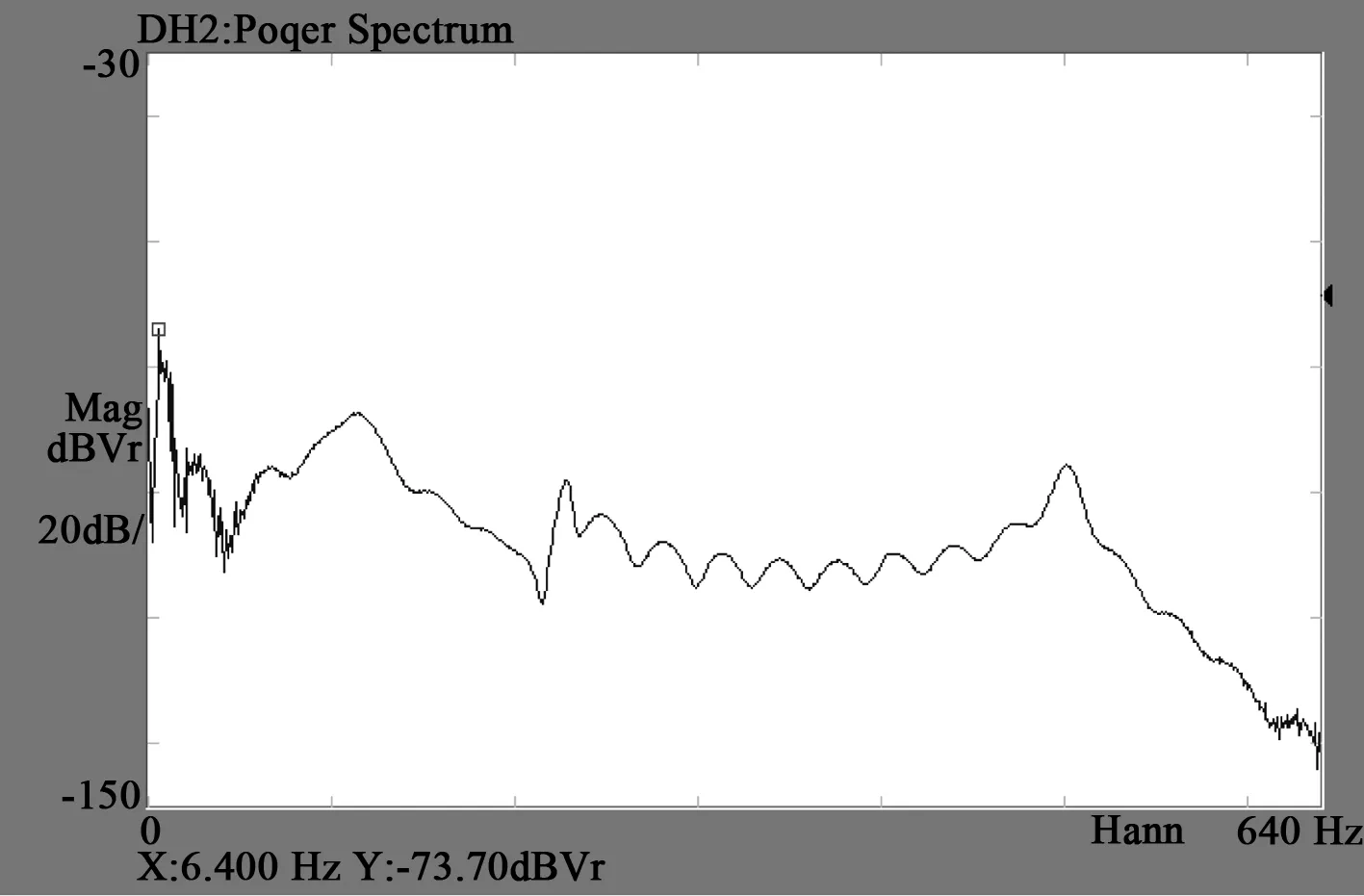
图13 一阶模态试验功率谱密度函数分析结果

图14 二阶模态振型对应频率测试试验

图15 二阶模态试验功率谱密度函数分析结果
飞行器正常飞行的过程中,设计旋翼驱动电动机的转速为8 000~13 000 r/min,电动机转子旋转产生的振动频率为133.3~216.7 Hz。正好处在一阶、二阶模态固有频率之间,从而能够有效避免共振现象的发生,该飞行器机械结构的设计能够满足性能要求。
5 新型四旋翼两栖机器人的功能控制
本设计采用PLC控制各执行部件,在本发明各个执行部件处均安装有传感器,PLC实时采集各传感器的信息。利用闭环信息反馈调节方式,与发出指令进行比较处理,然后再作出相应指令,直到执行部件达到预设位置,这样大大提高了机器人飞行时的准确度和可靠度[6-8]。四旋翼两栖机器人的闭环控制系统方框图如图16所示。
当PLC接受到开始指令时,该机器人便以设定的功能实现陆地爬行或空中飞行。同时,信息采集机构也开启,并将采集信息时时传达给通信中心。当机器人在陆地爬行时,其旋翼停止旋转。地面行走机构开始运行,由于该机器人4条腿上分别安装有轮毂电动机,并且能够通过控制系统实现不同方向的旋转,当其在行走过程中遇到简单障碍时,安装于该机器人上的传感器会将信息传达给控制系统,进而控制系统会通过控制微型销轴电东机的旋转,来弯曲机器人的腿部结构使其越过障碍;因此,机器人能够在复杂地形里实现任意方向快速转向。由于该机器人在照明设备处安装有光传感器,当飞行到黑暗地方时,会将信号反馈给控制系统,进而照明设备开启,保障了信息采集的顺利进行。当机器人在空中执行飞行指令时,能够按照控制系统的制定目标进行飞行,并将飞行速度、飞行距离及飞行方向时时传达给控制系统,通过闭环反馈调节控制方式,时时控制4个电动机的转速实现机器人的垂直运动、俯仰运动、滚转运动、偏航运动、前后运动和侧向运动,从而实现机器人准确无误地到达指定位置。
6 新型四旋翼两栖机器人的运动形式
四旋翼两栖机器人的运动流程图如图17所示。

图17 四旋翼两栖机器人的运动流程图
由于机器人在路面爬行时,左右转弯及跨越障碍运动简单,故本文不做详细介绍。机器人飞行时各个动作[9-10]详细描述如图18和图19所示。由于结构对称,所以侧向飞行的工作原理与前后运动完全一样。

图18 工作流程图

图19 飞行动作原理示意图
7 结语
通过对四旋翼两栖机器人的结构设计及仿真校核,完成了机器人的机械部分设计。通过PLC控制系统,并综合利用光电传感器、声音传感器和力敏传感器等实现系统的闭环反馈调节,综合利用伺服电动机和四旋翼等机械结构特性,以及控制系统的时时反馈特点,实现了机器人预定的动作,最终完成了人类指定的任务。
[1] 江斌,孙志锋. 四旋翼机器人自主航行的设计[J]. 电子技术, 2012(2):10-12, 9.
[2] 姜强. 四旋翼无人机器人航模自动驾驶仪设计与实现[D]. 成都: 电子科技大学, 2013.
[3] 谭广超. 四旋翼机器人姿态控制系统的设计与实现[D]. 大连:大连理工大学,2013.
[4] 甄红涛,齐小慧,夏明旗,等.四旋翼无人直升机飞行控制技术综述[J].飞行力学, 2012, 30(4): 295-299.
[5] 尹春望. 复合材料旋翼结构优化设计技术及应用[J]. 航空科学技术,2006(5):33-36.
[6] 单海燕.四旋翼无人直升机飞行控制技术研究[D].南京:南京航空航天大学,2008.
[7] 杨一栋.直升机飞行控制[M].2版.北京:国防工业出版社,2011.
[8] 郭晓鸿,杨忠,杨成顺,等.一种基于STM32的四旋翼飞行器控制器[J]. 应用科技,2011(7): 35-40.
[9] 刘沛清.空气动力学基础[M].北京:北京航空航天大学出版社,2010.
[10] 唐正飞.直升机空气动力学[M].长沙:国防科技大学出版社,2008.
*国家级大学生创新实验计划项目(7150080050)
责任编辑郑练
TheDesignandResearchoftheNewFour-rotorAmphibiousRobot
XU Boda, YU Danyang, ZHAO Hongwei, YANG Yuheng, REN Shuai, LI Jiasi
(School of Mechanical Science and Engineering, Jilin University, Changchun 130022, China)
In the view of the good application prospect about the robots with four rotors and according to robot flight characteristics and creep characteristics, this paper develops a new type robot with four rotors. By means of the Pro/Engineer software to design the structure and the ANSYS to analyze the key parts of the robot. Through all kinds of sensors to achieve the closed loop control system, this paper combines system control strategy and main sensors to achieve the robot motion real-time feedback, then put forward the main movement mode and control strategy of the robot. The designed robot has characteristics like the light structure, the convenient control, and good adaptability for complex work environment etc., it has important prospects in areas such as special environment survey and disaster detection.
four rotors, amphibious robots, static analysis, movement patterns, modal analysis

TH 134
:A
徐博达(1993-),男,大学本科,主要从事仿生机器人等方面的研究。
2015-02-13
