永磁直驱风力发电功率滑模控制器的研究
2015-07-18
(西华大学电气与电子信息学院,四川 成都 610039)
·机电工程·
永磁直驱风力发电功率滑模控制器的研究
孙 章,陈金伟,李 明
(西华大学电气与电子信息学院,四川 成都 610039)
永磁直驱风力发电机具有多变量、非线性及强耦合的特点,系统参数变化较大直接影响系统的控制性能。基于此,设计了一种功率滑模控制器,并在直驱电机数学模型的基础上,设计出直驱发电变流控制系统,将此滑模控制器应用于该系统的机侧控制。控制器根据系统当前的状态采用滞环函数使系统精确的在给定滑动模态轨迹中运动,其设计过程与对象参数及扰动无关,因此,该系统具有良好的抗干扰能力,并能有效解决高频率切换带来的抖振效应。在搭建的8极5 kW直驱发电机的Matlab/Simulink仿真模型中,对系统输出的电压、电流、功率控制进行了仿真分析 ,其结果表明,系统并网冲击小、功率跟踪精度高,表现出良好的动态性、稳定性和鲁棒性。
永磁直驱风力发电;滑模控制器;滞环函数;精确跟踪
随着风力发电技术的不断发展,永磁直驱式发电机(PMSG)以其效率高、转动惯量小、可靠性高等优点,越来越受到人们的青睐。研究永磁式直驱风力发电机的控制策略,提高风力发电系统的稳定性、电能质量以及鲁棒性显得尤为重要[1-3]。
目前应用于永磁直驱风力发电机的控制算法有PID控制算法、神经网络控制算法、模糊控制算法以及滑模控制算法等。PID控制算法响应快,精确度高,但依赖于系统参数,受外界影响较大[4]。神经网络控制工作时具有高的速度和较强的容错能力,但构建神经网络控制器需要精确分析神经网络的节点模型、各项性能指标且体系结构的通用性差,难于实现[5]。模糊控制使用语言的方法,不需要控制过程的精确数学模型,有较强的容错能力,但信息简单的模糊处理将导致系统的控制精度降低和动态品质变差,设计尚缺乏系统性,无法定义控制目标[6]。与以上算法相比,滑模控制的优势在于系统的结构并不固定,可根据系统当前的状态,迫使系统按照预定滑动模态的状态轨迹运动,其设计过程与对象参数及扰动无关,因此滑模控制具有快速响应、物理实现简单、鲁棒性好等优点[7]。在实际滑模系统中,由于开关器件的时滞及惯性等因素的影响,系统的状态到达滑模面后,在滑模面附近做来回穿越运动,甚至产生极限环振荡,影响系统的性能[8]。
本文利用滑模变结构控制的优点,在分析系统数学模型的基础上设计了滑模控制器以实现永磁直驱风力发电机电机侧的功率调节,并通过搭建仿真模型进行实验,以验证控制算法的正确性。最终的实验结果表明,系统能精确跟踪给定功率,并具有良好的动态性和稳定性。
1 直驱式风力发电系统数学模型
1.1永磁风力发电机动态数学模型
永磁同步发电机直接和变流器相连,它发出的电能通过变流器传入网侧。变流器是系统能量交互的关键部件之一。PMSG是一个复杂的非线性系统,因此,要想对其进行控制必须建立数学模型。为简化PMSG模型,对本文研究的极对数为8的凸极永磁同步发电机做以下假设:1)不计涡流和磁滞损耗,忽略其铁芯磁阻;2)电机定子绕组对称,所产生的磁动势沿气隙圆周成正弦规律分布;3)绕组中感应电动势波形为正弦波。
根据转子磁场定向法建立同步旋转坐标系,以永磁同步发电机转子磁极为坐标系d轴,q轴超前d轴90°,由此得到定子电压方程[9]为:
(1)
式中:usd、usq、isd、isq为发电机定子输出电压、电流在d、q轴的分量;Ld、Lq为永磁同步发电机的d、q轴等效电感;ωe为发电机电角速度;ψ为转子永磁体磁链。
发电机功率为
Pe=Te·ωe。
(2)
式中:Pe为发电机电磁功率;Te为发电机电磁转矩。
发电机电磁转矩为

(3)
1.2网侧变流器数学模型
图1为永磁直驱变速恒频风力发电机的三相PWM网侧变换器拓扑结构,根据基尔霍夫定理,得到电网侧变流器在dq轴系下的电压方程[10]为:
(4)
式中:ucd、ucq分别为网侧变流器交流输出电压的d、q轴分量;ugd、ugq分别为电网电压的d、q轴分量;igd、igq分别为电网电流的dq轴分量;L为电网侧电感;R为线路等效电阻;ω为电网频率。
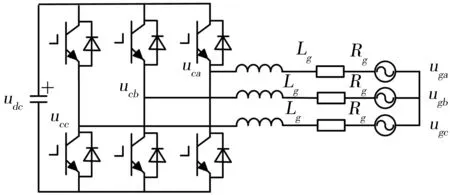
图1 三相PWM网侧变换器主电路
1.3滑模控制器的设计
1.3.1 数学描述
对于非线性切换系统

(5)
式中:x(t)为n维空间Rn中的状态变量向量;g(x)和φ(x)为同一空间中平滑向量场;u(t)为不连续控制函数,即:
(6)
式中:U+和U-为标量值或x(t)的标量函数;S(x,t)为系统的瞬时状态反馈跟踪轨线且为状态变量的预设函数。切换面表达式为
(7)
式中,αi(i=1~m)为控制参数,称为滑动系数,且xi(t)∈x(t)。当式(5)所描述系统满足式(6)和式(7)条件时,称该系统表现出滑模特性。
1.3.2 功率滑模控制器设计
本文采用功率外环滑模变结构控制器,首先确定切换面函数S(x)。系统控制的目标为发电机输出有功功率Pg能够有效地跟踪期望的有功功率Pref,由此可设
S=Pref-Pg。
(8)
将式(2)代入式(8)对切换函数求导

(9)
为使系统以恒速向滑膜面S=0运动,得出控制函数应满足条件

(10)
联立式(9)和式(10)得

(11)
将式(3)代入式(11)得

(12)
对式(11)进行积分后得到期望的iref。
利用滞环控制函数实现滑膜控制无需附加的计算或辅助电路,实现方法简单:
(13)
引入边界条件为S=Δ和S=-Δ的滞环后,状态的交替周期被延迟,使控制器切换频率变得有限,从而解决了系统以极高频率切换的问题。系统的轨线S将精确地在滑动流行的±Δ范围内运动,且振荡受到控制,此时抖振效应也可控制且为Δ的函数,如图2所示。
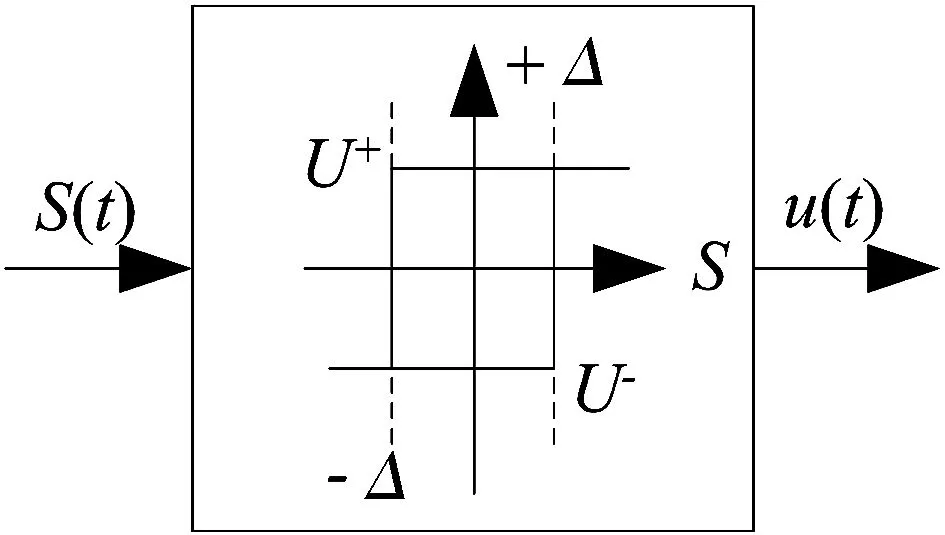
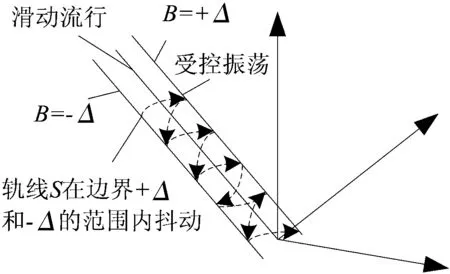
图2 滞环控制原理图
由此可得出滑膜控制器的原理框图,如图3所示。
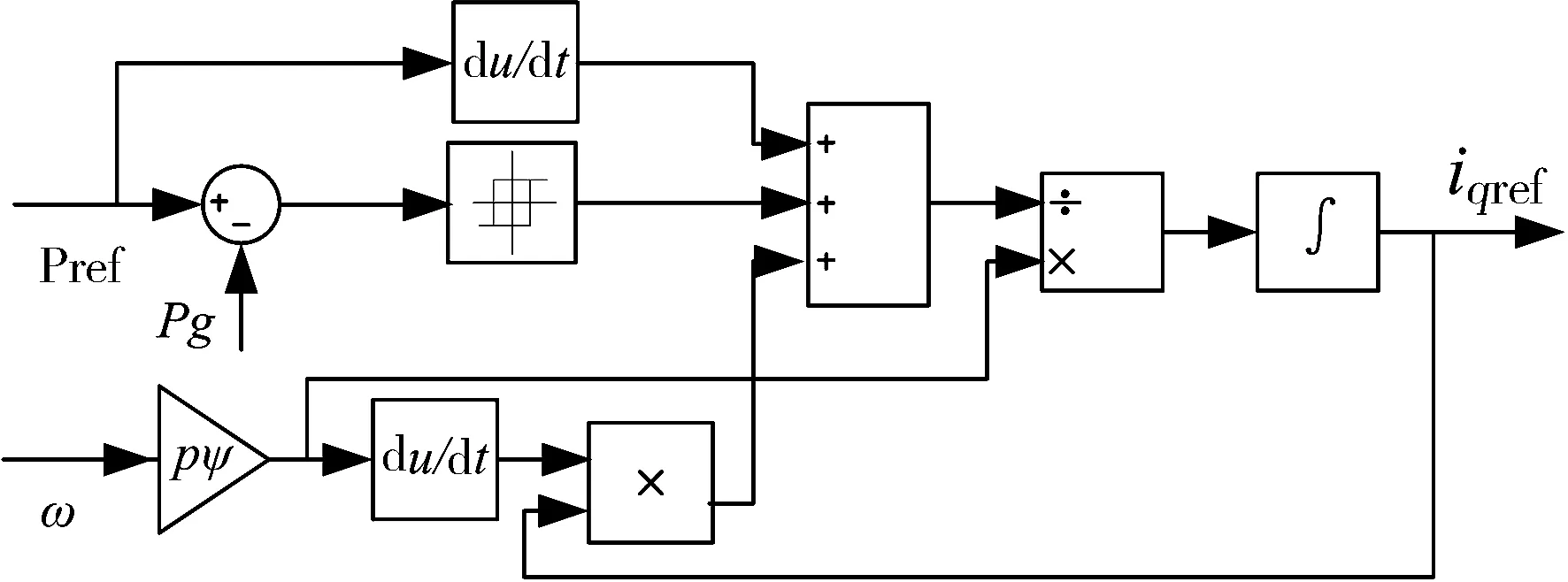
图3 滑模控制器原理图
2 PMSG控制策略

根据永磁同步发电机和网侧变流器的数学模型,可以得到整个系统的控制框图,如图4所示。机侧变流器通过电流传感器采样定子电流ia、ib、ic,利用光电编码器得到发电机的转子位置角θr经计算后得发电机转子转速ωm[12],ωm通过MPPT控制模块可求得最优期望值。
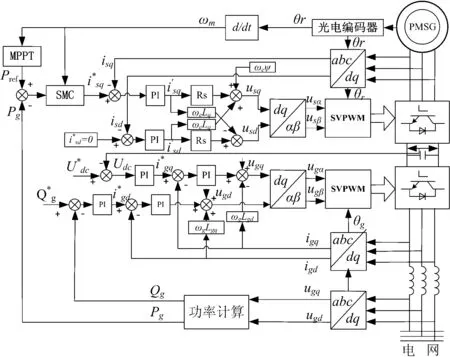
图4 直驱式风力发电机组控制框图
3 仿真验证

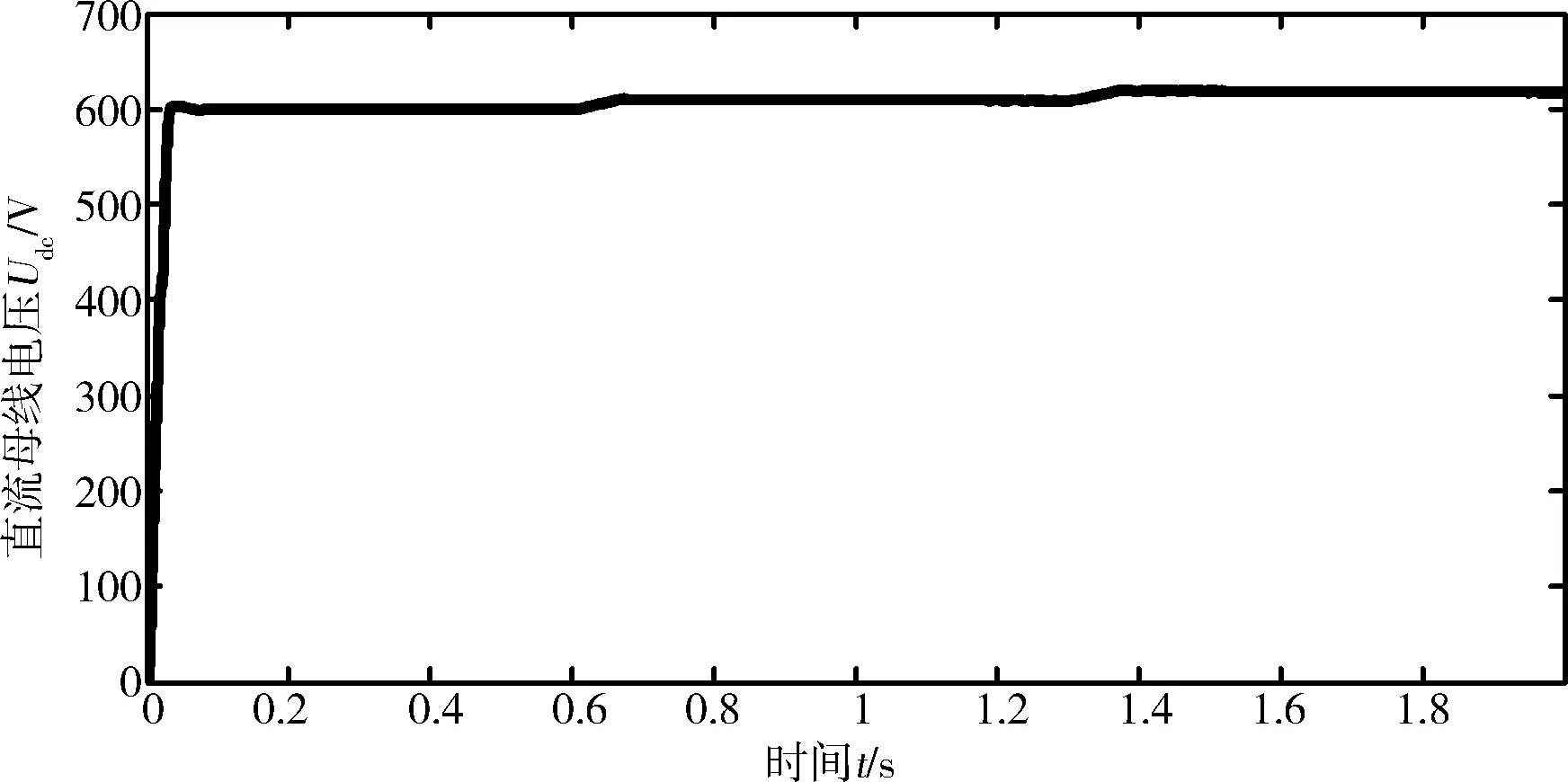
图5 直流母线电压波形
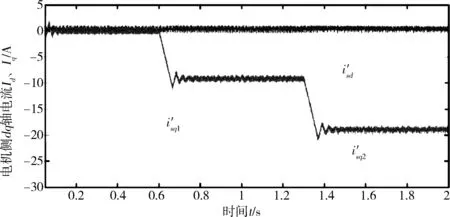
图6 机侧d、q轴电流波形
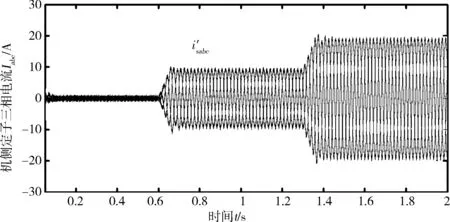
图7 机侧定子三相电流波形
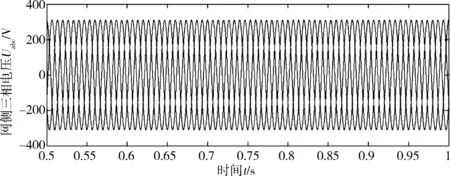
图8 网侧三相电压波形
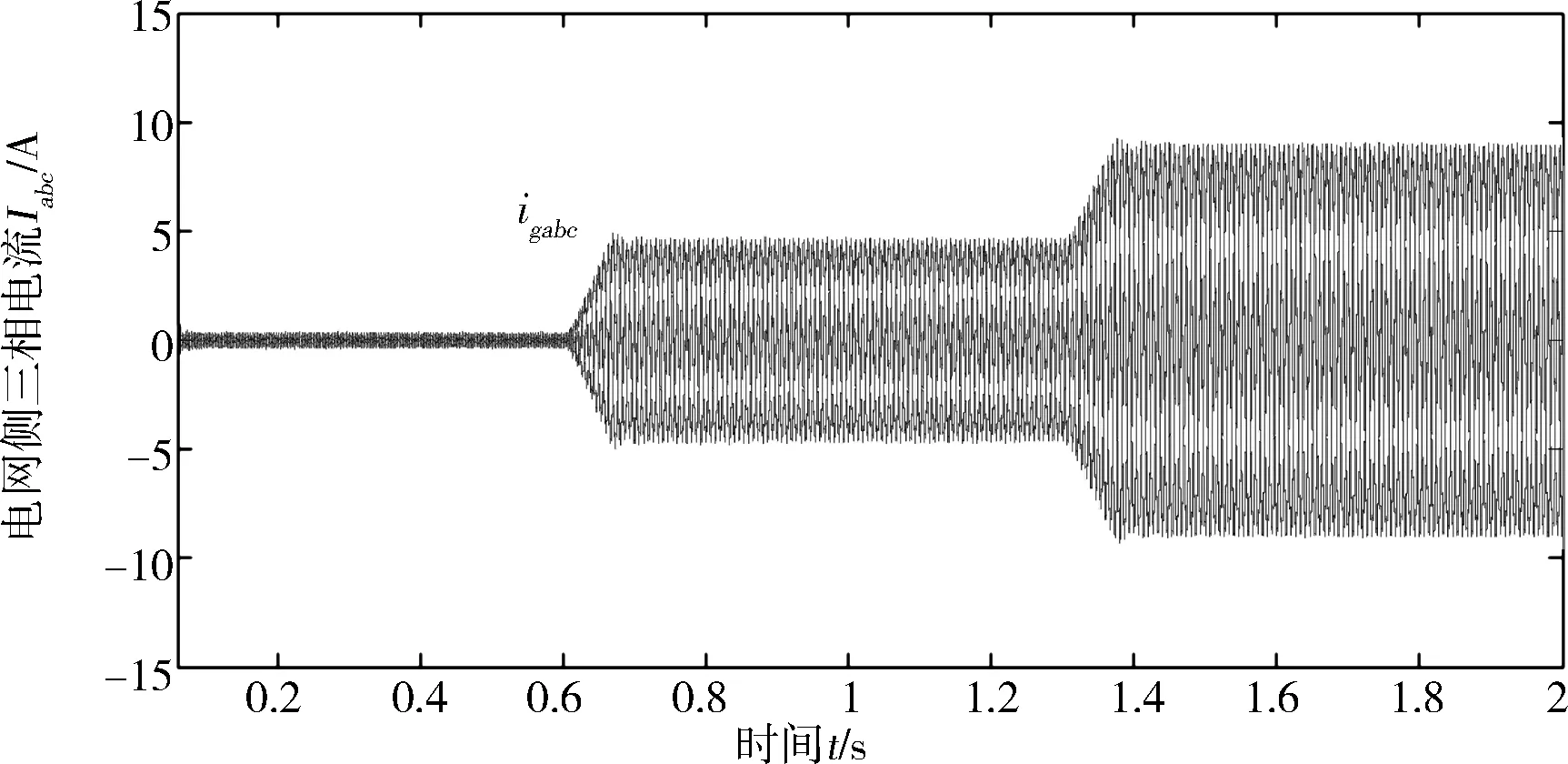
图9 网侧电流波形图
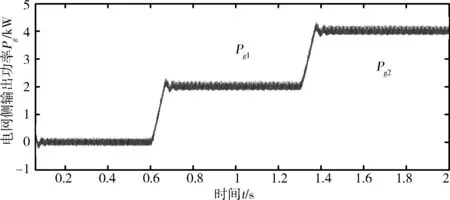
图10 网侧功率波形
4 结论
本文采用PWM变流器实现对机侧电机和网侧并网运行的控制,并对风力机发电控制网侧并网运行做了研究分析;设计了功率滑模控制器,并搭建了Matlab/Simulink仿真模型。仿真实验分析,证明了本文设计的控制策略的可行性和高效性,同时有效地控制了抖振效应,系统能够精确跟踪给定的有功功率,实现功率的稳定控制。网侧系统谐波含量少、并网冲击冲击小,实现了柔性并网,能快速有效地完成各项控制任务。
[1]李军,田野,田华,等.永磁直驱风力发电中风力机模拟系统的研究[J].电力电子技术,2011,45(1):33-35.
[2]董行健,庄圣贤. 典型电网故障下双馈风力发电系统仿真与分析[J]. 西华大学学报:自然科学版,2011,30(3):25-30.
[3]陈娟,董秀成,陈庆涛. 直驱式永磁同步风电系统变桨距控制算法研究[J]. 西华大学学报:自然科学版,2012,31(3):45-49.
[4]高剑,黄守道,张文娟,等.基于变流器控制策略的直驱永磁风力发电机优化设计[J].电工技术学报,2013,28(7):104-109.
[5]党选举,徐小平,于晓明.永磁同步直线电机的小波神经网络控制电机与控制学报[J].2013,11(9):36-41.
[6]Boobalan M,Vijayalakshmi S.A Fuzzy-PI Based Power Control of Wind Energy Conversion System using PMSG[C]//Energy Efficient Technologies for Sustainability(ICEETS). Nagercoil:IEEE,2013:577-583.
[7]Jianhu Yan,Heyun Lin,Xun Guo.Improved Sliding Mode Model Reference Adaptive System Speed Observer for Fuzzy Control of Direct-drive Permanent Magnet Synchronous Generator Wind Power Generation System[J].Renewable Power Generation, IET Digital Object Identifier,2013,7(1):28-35.
[8]孙力. 永磁同步电机调速系统滑模变结构控制若干关键问题研究[D].哈尔滨:哈尔滨工业大学,2014.
[9]张仰飞,李海峰,王伟胜,等.直驱永磁同步风力发电机的电气参数辨识[J].电力系统自动化,2012,36(14):150-153.
[10]Thanh Hai Nguyen,Dong-Choon Le.A Novel Current Control Scheme of Grid Converters for Small PMSG Wind Turbines under Grid Voltage Distortion[J]. Power Electronics and Machine,2012,16(18):1-6.
[11]Thongam J S,Bouchard P,Beguenane R. A Neural Network based Wind Speed Sensorless MPPT Controller for Variable Speed Wind Energy Conversion Systems [J]. Electric Power and Energy Conference 2010,25(27):1-6.
[12]严干贵,魏治成,穆钢,等.直驱永磁同步风电机组的动态建模与运行控制[J].电力系统及其自动化学报,2009,21(6):34-39.
[13]Errami Youssef, Maaroufi Mohamed, Ouassaid Mohammed. Control Scheme and Maximum Power Point Tracking of Variable Speed Wind Farm based on the PMSG for Utility Network Connection[C]// Complex Systems (ICCS), 2012 International Conference on. Agadir:IEEE, 2012:1-6.
(编校:饶莉)
ResearchonPowerSlidingModeControllerforPMSGWindTurbineSystem
SUN Zhang, CHEN Jin-wei,LI Ming
(SchoolofElectricalEngineeringandElectronicInformation,XihuaUniversity,Chengdu610039China)
The permanent magnet synchronous generator (PMSG) has multi-variable, nonlinear and strong coupling features, so the system performance will be influenced by the system parameters variation. Therefore, the sliding mode controller is designed, and the corresponding converter control system is proposed based on the mathematical model. According to system state, the hysteresis function is adopted to set up the accurate sliding track for system running. The system has good anti-jamming capability, and the high frequency switching buffeting effect can be controlled. The model has been built in Matlab/Simulink enviroment and the simulations have been conducted for PMSG which has eight poles and five thousand watts. The simulations of voltage, current and power has been conducted, the results show that the system has small impact on the grid, high tracking accuracy, good dynamics, stability and robustness performance.
PMSG;sliding mode controller;hysteresis function; accurately track
2014-11-15
四川省教育厅成果培育项目基金资助(12ZZ007);西华大学研究生创新基金(ycjj2014148)
孙章(1986—),男,助理实验师,硕士,主要研究方向为光伏、风力分布式新能源发电技术。E-mail:2372501736@qq.com
TM614;TM761
:A
:1673-159X(2015)04-0028-04
10.3969/j.issn.1673-159X.2015.04.006