基于长基线水声定位系统水下定位技术初步应用研究
2015-07-12田春和秦建
田春和,秦建
(1.山东省高校海洋测绘重点实验室(山东科技大学),青岛266590;2:交通运输部天津水运工程科学研究所,天津300456)
基于长基线水声定位系统水下定位技术初步应用研究
田春和1,2,秦建2
(1.山东省高校海洋测绘重点实验室(山东科技大学),青岛266590;2:交通运输部天津水运工程科学研究所,天津300456)
长基线定位系统(Long Baseline),简称LBL,是一种高精度深水水下定位系统。文章在介绍了国内外LBL发展现状基础上,通过松花湖LBL水下定位系统试验,介绍了其定位理论和方法,解决了50m水深海底信标布放、固定及回收问题,探索了海底应答器相对校准(基线校准)、绝对校准方法,确定了定位标的跟踪定位方式,形成了相对完整的LBL水下定位流程和方法体系,得到了高精度水下定位数据,为实际工程应用提供了真实的理论基础。
长基线水声定位系统;相对校准;绝对校准;跟踪定位
随着科学技术的发展和对能源的需求,近年来人类已经将注意力越来越多地转向海洋资源的开发和利用。水下定位技术为海洋开发和科学研究提供基础保障作用。在海洋石油开发中的井口重入、水下油气管道的布设、水下电缆的铺设、水下救险、沉船打捞、水下机器人定位、靶场定位、潜水员定位以及航道异物清除等都要用到水下定位技术。
长基线定位系统(Long Baseline),简称LBL,是利用测量水下目标声源到各个基元的时间差,解算目标的方位和距离,最终得出目标精确的三维位置,为水下施工提供精确的定位服务。长基线定位系统基线长度可达到100~6 000m,以其定位精度高,工作范围大而备受关注,而现在国内对于长基线的工程实际应用还没有普及,长基线水声定位系统通常伴随ROV一起应用于实际工程中,市场潜力巨大,效益非常可观,所以,长基线水声定位系统的应用具有重要意义。
1958年,由华盛顿大学的应用物理实验室建成的4个水听器组成的三维坐标跟踪水下武器靶场,为LBL水下定位系统的雏形[1]。USBL与LBL综合定位系统是水下声学定位系统技术发展的最新应用,提高了定位精度和系统可靠性的同时,也扩大了水下声学定位技术的不同需求和应用范围。20世纪80年代初,为了对目标实施精确导航及轨迹测量,国内靶场首次引进了法国Oceano公司的LBL系统[2]。哈尔滨工程大学交付海军使用的GRAT LBL水下定位系统开创了我国开展LBL系统研制的先河[2]。荀俊姑、郭纪捷等围绕有关声线修正方法,提出了基于平均声速迭代算法进行声线修正的思想和方法[3]。李莉、王先华根据长基线同步定位原理对测阵方法进行了仿真研究[4-5]。高剑等在未校准前提下提出基于地图创建和无迹卡尔曼同步定位方法,输出了高精度LBL跟踪定位结果[6]。
1 LBL系统组成及工作原理
1.1 LBL系统组成
LBL包括三大部分:在船舶上的数据处理系统;安装在定位目标或船舶上的声学收发器(transducer);另一部分是布放在海底由多个收发应答器组成的定位基阵。由应答器之间的距离构成基线,长基线水声定位系统通过测定声学收发器和应答器之间的距离或者应答器与跟踪定位应答器之间的距离,利用前方交会或后方交会算法,对目标进行跟踪定位。
除了上述三大主要部分外,根据LBL绝对定位要求,长基线水声定位系统还需要其他外围支持设备:定位系统GNSS、电罗经、姿态补偿装置等。此外,声速剖面仪也是声学系统不可或缺的设备。
1.2 LBL工作原理
长基线系统包含两部分,分别是收发器部分和应答器部分。收发器部分是安装在船只上或水下机器人上;应答器部分是安装在一系列固定海底位置,各个应答器之间的距离构成基线。与超短基线和短基线相比,长基线的基线长度较长,在百米到几千米之间。长基线水声定位系统主要是通过测量收发器和应答器之间的距离,采用测量中的前方或后方交会,实现对目标的定位。系统的工作方式是距离测量。
实际工作时,既可利用一个应答器进行定位,也可以同时利用两个、三个或更多的应答器来进行测距定位。用一个应答器定位方法,是以船速、航向误差较小为前提,定位精度不高,而实际工作中,运用三个以上应答器进行跟踪定位,产生多余观测值,从而得到更高相对定位精度。本文以三个水下应答器来说明长基线水下定位系统的工作原理。
如图1所示,以x、y、z来表示跟踪目标的三维坐标;以(xi,yi,zi),i=1,2,3表示已知的水下信标Ti的坐标,Ri(i=1,2,3)为跟踪目标与水下信标的距离。由跟踪目标到水下应答器的空间交会距离可知方程(1)
不过,刘霆在报告中也指出,2017年,我国人均年饮料消费量约为130公斤,其中包装饮用水消费量占比接近53%。若不含包装饮用水的人均年消费量为61公斤,尚低于每年90公斤的世界平均水平,更远低于欧美国家人均消费水平。

求解方程组即可得到跟踪目标的x、y、z三维位置。根据测量平差原理,实际应用中,需要接收4个以上海底应答器的信号,产生多余观测,从而满足最小二乘平差计算,提高测量的精度。

图1 长基线定位示意图Fig.1 Sketch of LBL positioning system
2 LBL系统工作流程
本次试验设备主要包括LBL定位系统、RTK双频GPS接收机、VRU、Gyro、多波束测量系统、声速剖面仪、导航软件等。首先将LBL收发器用钢管固定并放置在船舷远离噪声的地方,使换能器过船底;通过电缆把换能器与甲板单元连接,并通过串口线使甲板单元与导航机相连;采用SeatexmRU⁃05姿态传感器,Pitch/ Roll测量精度为±0.05°,Heave测量精度±5 cm,TSS电罗经测量精度为±0.1°,为LBL船载换能器提供姿态补偿数据。GPS采用Leica GPS1200双频RTK,用于LBL船载换能器定位及基准传递。
工作过程包括:准备工作、水底基阵设计、基阵布放校准、跟踪定位、数据处理等,其中,准备工作内容为GPS基准站点位测量、设备安装、多波束地形测量;基阵设计内容有单个水下信标的固定支架设计,布放地形选择,根据地形设计集镇布放位置;基阵布放校准包括水下信标的收放方式、相对校准、绝对校准及校准数据处理;跟踪定位为LBL换能器的跟踪定位。
2.1 海底基阵网设计
根据工作范围、现场海域条件和技术要求,设计海底基阵信标个数、信标间距离,同时根据信标间距离和海底地形高差确定每个信标与海底的距离。根据现场工作条件采用绞车布放海底基阵。本次作业使用5个信标进行水下基阵的组成,基阵边长为100m。
2.2 海底基阵校准
海底基阵为LBL定位提供起算基准,其精度直接影响定位精度。LBL基阵校准分为相对校准和绝对校准。对于绝对校准,如何获取高精度的阵元绝对位置是长基线绝对校准的关键技术之一,也是测绘基准由水面传递到海底的关键技术。
(1)相对校准。首先采用相对校准方法,对海底基阵进行校准,相对校准的观测值为:水深、基线长度、海底信标的先验坐标。为了验证相对校准时,不同信标个数对相对校准的影响,本次试验进行三次相对校准试验,得到的平差后校准精度分别为1.3 cm、1.5 cm、1.6 cm,都达到了厘米级精度。(2)绝对校准。相对校准完成之后,对基阵选取对角最长边的两个海底信标进行绝对校准,海底基阵绝对校准采用GNSS定位技术和声学测距技术,对海底基阵阵元进行精确定位,得到相应的海底阵元绝对坐标,并以该绝对坐标为起算数据,在相对校准测边网平差计算结果的基础上,获得各阵元绝对坐标。绝对校准采用单个信标校准模式,使用导航软件指挥测量船按照一定的圆轨迹,围绕信标进行顺时针绕三圈。
选取圆半径与信标深度大致相近的数据进行平差计算,由计算可以看出,不进行粗差提出,结算所得信标绝对校准精度为±1m;采用2σ原则剔除粗差,绝对校准精度为±1cm,采用1σ进行粗差剔除,虽然精度达到厘米级,但超过80%数据被剔除,可靠性降低。则采用2σ原则剔除粗差,得到的绝对校准数据用于后续跟踪测量。
为了验证绝对校准中不同方向走航对校准精度的影响,分别采用逆时针、顺时针进行绝对校准试验,采用2σ进行剔除粗差后,平差结果为:顺时针绝对校准精度为1 cm,逆时针精度为1 cm;顺时针、逆时针所有数据参与平差后,绝对校准精度为0.7 cm,可以看出走航方向对校准精度没有太大影响,顺时针和逆时针数据合并解算提高绝对校准精度。
2.3 跟踪定位
跟踪定位作业时,输入准确的声速,通过水面船只的收发器对目标上的收发器下达测量指令,选择参与跟踪定位的阵元和跟踪方式,系统自动开始测距,同时将数据上传至定位软件,软件对数据进行处理,解算目标的位置。
本次试验,使用的是高精度RTK定位系统,其动态定位精度在2 cm,GPS基准站架设在松花湖边附近楼顶,距离试验水域1 km左右距离,基准站点位位置通过24 hGPS静态观测,并与IGS长春站联测得到。
把RTK天线固定在垂直于换能器的位置,并输入其高度差,把换能器与RTK归算到同一位置,根据校准后的基阵位置,来跟踪测量换能器的实时位置,并与RTK天线位置进行对比,用以分析LBL定位系统的跟踪测量精度。
3 定位数据分析
影响LBL定位的误差源按影响特性分为偶然误差、系统误差和粗差三类,偶然误差如测时误差、罗经方位误差、姿态仪误差等;系统误差包括GNSS定位误差、声速测量误差、姿态仪安装偏差等;粗差包括多路径效应、异常GNSS定位数据、海底基阵变动等。上述误差中,偶然误差可通过数据处理来削弱;系统误差如GNSS定位误差、声速测量误差,可通过提高GNSS定位精度、进行声线修正来削弱;而粗差的影响,除采用严格的观测流程消弱之外,还可以采用统计学方法进行消除。
本次数据分析所采用的数据为松花湖试验其中某一天的观测数据,布放5个海底信标组成海底基阵,经过相对校准和绝对校准后,对换能器进行跟踪定位,并与安装在LBL换能器正上方的GPS RTK定位数据进行对比分析,结果如表1所示。由表1可以看出,在X、Y方向的精度较低,而在Z方向的精度较高,结合试验现场条件分析,由于船只横摇、纵摇引起的在XY平面位置换能器与RTK位置的偏差。如果认为大于0.5m的差异为粗差,则剔除粗差可得表2中数据。由表2中可以看出,剔除粗差后,在XYZ方向上的精度分别为0.261m、0.224m、0.081m,分别在分米量级和厘米量级。说明LBL水下定位系统具有较高精度。

表1 换能器跟踪定位结果与GPS RTK定位结果在XYZ三方向差异对比表Tab.1 Statistical result of transducer and GPS location
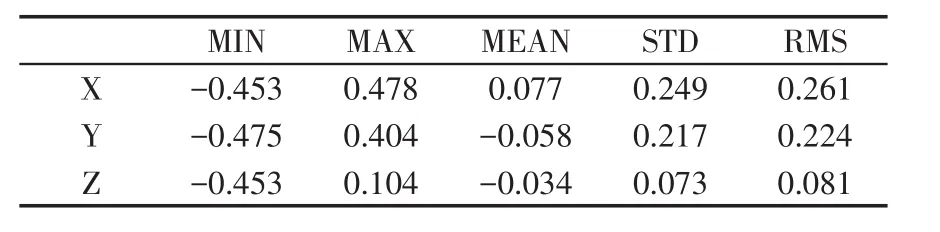
表2 剔除粗差的换能器定位结果与GPS RTK定位结果在XYZ三方向差异对比表Tab.2 Statistical result of transducer location without gross error and GPS location
4 结论
本文系统介绍了LBL试验的实验前准备、水下基阵布设、水下基阵校准、跟踪定位整个过程。
在此基础上,探讨了不同校准方法对校准精度的影响。在绝对校准中,不同数量的基线参与校准时对相对校准精度的影响不同,全部基线参与校准时,相对校准精度为1.3 cm;对角线基线不参与解算时,校准精度为1.5 cm;相邻边基线不参与解算时,校准精度为1.6 cm。都达到了厘米级精度。绝对校准时,顺时针、逆时针绝对校准精度都为1 cm,当同时参与解算时精度达到0.7 cm,精度有所提高,都达到了厘米级精度。
在跟踪定位时,剔除粗差后定位精度在XYZ分别为0.261m、0.224m、0.081m,由本文的最终结果看,基于LBL的水下定位系统跟踪定位结果,与GPS RTK定位结果对比,具有较高的定位精度。论文所试验的LBL精密跟踪定位理论方法正确,为实际工程提供了理论基础。
[1]田坦,刘国枝,孙大军.声纳技术[M].哈尔滨∶哈尔滨工程大学出版社,2000.
[2]付进.长基线定位信号处理若干关键技术研究[D].哈尔滨∶哈尔滨工程大学,2007.
[3]荀俊姑,郭纪捷.深海超短基线声学定位系统计算目标水平距离的一种新方法[J].海洋技术,1997,16(4)∶17-22. XUN J G,GUO J J.A Newmethod tomeasure Horizontal Distance of Target by a Deep Ocean Ultra Short Baseline Acoustic Posi⁃toning System[J].Ocean Technology,1997,16(4)∶17-22.
[4]李莉.长基线阵测阵校阵技术研究[D].哈尔滨∶哈尔滨工程大学,2007.
[5]王先华.长基线水下跟踪定位系统测阵校阵及系统集成[D].哈尔滨∶哈尔滨工程大学,2004.
[6]高剑,徐德民,严卫生,等.应答器未校准情况下的水下长基线定位方法研究[J].西北工业大学学报,2005,23(6)∶754-758. GAO J,XU Dm,YAN W S,et al.A New and Bettermethod of Underwater LBL Localization with Unsurveyed Transponders[J]. Journal of Northwestern Polytechnical University,2005,23(6)∶754-758.
Applied research of long baseline acoustic positioning system based on underwater positioning technique
TIAN Chun⁃he1,2,QIN Jian2
(1.Key Laboratory ofmarine Surveying andmapping in Universities of Shandong(Shandong University of Science and Technology),Qingdao 266590,China;2.Tianjin Research Institute for Water Transport Engineering,Tianjin 300456,China)
Long baseline positioning system,referred to as LBL,is a kind of high precise deep underwater posi⁃tioning system.Based on analyzing the development situations of LBL,the positioning theory andmethod were stud⁃ied systematically according to the experiment in Songhua lake,and the problems of seabed beacons laying,fixation and recycle in 50m water depth were solved in this paper.Then relative calibration(baseline calibration)method and absolute calibration(box⁃in)were explored,and the tracking and positioningmode of localizer was determined. An integrated system and a positioning process of LBL were formed,and the high precise underwater positioning da⁃ta were obtained.
long baseline acoustic positioning system;relative calibration;absolute calibration;track localiza⁃tion
P 229
A
1005-8443(2015)03-0268-04
2014-10-09;
2014-11-14
山东省高校海洋测绘重点实验室(山东科技大学)资助项目(2013A01)
田春和(1979-),男,吉林省榆树人,高级工程师,主要从事海洋工程勘察研究工作。
Biography:TIAN Chun⁃he(1979-),male,senior engineer.
