2BQHM-2型花生覆膜穴播机的设计与试验
2015-07-12吕小莲胡志超刘敏基于向涛张会娟
吕小莲,胡志超,刘敏基,于向涛,张会娟
(1 农业部南京农业机械化研究所,江苏 南京210014;2 滁州学院 机械与电子工程学院,安徽 滁州239000)
花生是世界上广泛栽培的主要油料和经济作物,中国是世界上主要的花生生产和消费国,同时也是最大的花生出口国,年出口创汇达6.1 亿美元[1-2].覆膜种植是我国花生生产的一大特色[3],目前花生地膜覆盖种植机械化程度还较低,基本上是采用先播种、后覆膜,出苗前划膜放苗的农艺过程,严重制约了地膜覆盖种植技术的推广应用.覆膜打穴播种是近几年发展起来的一项新型播种技术,因对土壤的扰动小,有利于土壤的保墒和抗旱,还可省去人工破膜环节,在节省工时的同时,避免烧苗,确保全苗.国内关于覆膜穴播的研究基本处于单项技术研究阶段,对于系统集成、联合作业技术的研究,尚处于起步阶段[4-8].本文利用虚拟设计软件UG 对气吸式花生覆膜穴播机进行了参数化设计,通过虚拟仿真技术对该机结构及整体配置进行了虚拟测试,并通过样机的田间性能试验对其整机及关键工作部件的作业性能进行了测试.
1 花生覆膜播种农艺技术要求
花生垄作覆膜机播时的农业技术要求参考文献[9-10]:播种前需整地,除去地表杂质,整地后松土层需大于60 mm;起垄,垄高为100~120 mm,2行种植时多采用宽窄行种植,垄面宽通常为500~600 mm,垄上种植2 行花生株间对齐,间距为250~350 mm;最佳播种深度为50 mm,播种深度要一致,绝对误差不超过规定的20%,对于地温较低或土壤湿度大的地块,可适当浅播,但不得小于30 mm,反之可适当加深,但不超过60 mm;播种密度要求花生2 行垄作播种穴距为155~185 mm,穴距误差值不超过规定穴距的10%,土壤肥力好的密度相应小一些,肥力差的密度大些.
2 整机结构及工作原理
该机主要由施肥装置、起垄犁、铺膜装置、穴播轮、覆土装置等部分组成,如图1.
穴播机通过牵引架三点悬挂在拖拉机上,施肥开沟器、起垄犁安装在机架前端,按照花生播种农艺施肥及起垄要求调整位置及深度.地轮通过链传动带动排肥器工作,实现定量施肥.穴播轮采用压板开启式成穴组件,成穴组件径向安装在滚轮体上;采用气吸式排种装置,利用风机负压使排种盘实现精量取种;穴播轮通过支架挂接在机架上,保证穴播轮与地表充分接触,当遇到障碍物或坚实度过大时,可随时抬起避免成穴部件损坏.机具作业时,先由起垄犁将两侧的土推向内侧,同时施肥开沟器开出肥沟,施肥装置在地轮的带动下将种肥排入肥沟内,平土板将垄面平整,开沟器按垄宽开出膜边沟,覆膜装置铺膜,并由穴播轮成穴器的压膜轮将地膜压入膜边沟,同时将膜边压紧,成穴部件打穿地膜在土壤上完成破膜、成穴、投种过程,随后由覆土装置完成膜边覆土及苗带覆土的过程.

图1 2BQHM-2 型花生覆膜穴播机结构图Fig.1 Structural sketches of 2BQHM-2 type peanut mulching film and punching planter
3 关键工作部件的设计
3.1 穴播轮的设计
穴播轮主要由成穴器、传动系统及气吸式排种装置三部分构成,如图2.其在机具作业中主要完成膜上成穴及精量取种、播种的作用,是花生覆膜穴播机的核心部件,其工作质量的好坏决定该机的作业性能.
3.1.1 成穴器的设计 成穴器是穴播轮的主要工作部件之一,由滚轮体、压膜轮、成穴组件等部分组成.其主要结构参数包括:滚轮体半径(R)、成穴组件个数(Z)、成穴深度(H)、固定鸭嘴倾角(鸭嘴前面与其中线夹角,α)、活动鸭嘴倾角(鸭嘴后面与其中线夹角,β)及鸭嘴开度(d).滚轮体半径与播种穴距、成穴深度、成穴组件个数等有关,其关系如下.
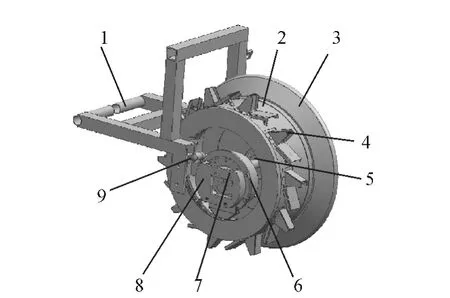
图2 穴播轮结构图Fig.2 Structural sketches of the dibbler
式中,R 表示滚轮体半径(mm);Z 表示成穴组件数(个);t 表示播种穴距(mm);H 表示成穴深度(mm).
由于穴播轮工作过程中依靠滚轮体滚动前进成穴并带动吸种盘取种,其转速过高对精量取种及成穴均不利,因此,为了使成穴器有较高的理想工作速度,R 取值应大,但R 过大,滚轮结构尺寸过大,使整机质量加大,不利于机组悬挂,同时对垄面质量、机组作业的灵活性均产生不利的影响.根据花生垄作覆膜播种农艺可知,通常情况下最佳播种深度为50 mm,常用穴距为155~185 mm,滚轮体半径的取值范围一般在340~480 mm 之间[5-11],依据作业及技术要求,设计时选择滚轮体半径(R)为460 mm,播种深度(H)为50 mm,综合考虑各参数代入上式得到,成穴组件个数Z≈10.
成穴鸭嘴倾角对成穴效果、入土性能、充种效果等均有较大影响.固定鸭嘴倾角(α)是引起挑膜的主要因素,其大小影响成穴器入土性能、出土时是否挑膜及出土时的动土量,由分析可知其越小挑膜越严重,且随作业速度的增加加剧,但其过大则不利于入土,造成膜孔增大,活动鸭嘴倾角(β)的存在,使穴孔、膜孔增大,但其过小,则难保证鸭嘴内充种,在参考文献[1-13]及分析的基础上,固定鸭嘴倾角(α)取15°~25°,一般取β 等于α,设计的成穴组件结构对称且活动鸭嘴顶端各点的轨迹落在固定鸭嘴顶端各点轨迹形成的包络线内,降低其对膜孔及穴孔的影响.鸭嘴开度决定种子排出效果,为使种子顺利排出,鸭嘴开启时开口大小应满足1.2dmax~1.5dmax(dmax为花生种子最大尺寸),其大小可由下式确定.
式中,φ 表示活动嘴转角(°);d 表示鸭嘴开度(mm);l 表示活动嘴长度(mm).
3.1.2 穴播轮传动系统 主要由连接盘、传动轴、挂轮机构等部分组成,如图3.

图3 传动系统配置图Fig.3 Configuration diagrams of the transmission system
分析得排种盘吸种孔线速度vp与穴播轮前进速度vm关系如下:

式中,D 表示排种盘直径(cm);q 表示每穴粒数(个);η 表示穴播轮滑移率(%);Z 表示排种盘吸种孔数(个);t 表示穴距或株距(cm);n 表示排种盘吸种孔排数(排).
由上式可知,穴播轮前进速度直接影响排种盘吸种孔线速度大小,进而影响种子充填性能,当vp过高时,吸种孔充种时间短,易造成漏播,且排种盘转速较大,种子产生的离心力就大,需要的吸种负压也越高,由于穴播轮吸种负压是由拖拉机输出轴间接提供的,因此转速范围受到限制.一般排种盘吸种孔线速度vp不易超过0.35 m/s[10],由此可确定机具作业的速度范围.
由于挂轮机构传动比为内辊子链轮与链轮配合比值,其值大小决定排种盘吸孔线速度大小,该值越大,排种盘转速越低,吸种时间越长,利于吸种,但其值的大小影响到排种盘吸种孔数及尺寸参数.根据播种要求及便于穴距调整,设计中选取挂轮机构比值为1.5 ∶1.0.
3.1.3 气吸式排种装置 主要由气室、排种盘、种子室等组成,见图4.排种盘孔径大小由播种花生的几何尺寸决定[10],设计中选取大粒花生和小粒花生排种盘的吸孔直径分别为6.0 和5.0 mm,排种盘吸种孔按径向分为2 排,根据选取挂轮机构比值及成穴部件个数,确定每排吸种孔为15 个,满足每穴播种量为2 粒.
气室吸种负压是决定穴播轮吸种能力的主要因素,不同品种的花生种子由于物理特性的差别,所需吸附力的大小也不同.在竖直面内回转的排种盘上,1 个吸种孔吸住1 粒种子所需吸附力为[10,14-15]:

式中,p0表示单个吸种孔吸力(N);d 表示吸种孔直径(cm);Q 表示单粒种子的重力、离心力及种子群内摩擦力的合力(N);C 表示种子重心与排种盘之间距离(cm).
由于实际作业中,受外界环境条件影响较大,因此引入吸种可靠性系数K1(K1=1.8~2.0,一般种子千粒质量小,形状近似球形时,取小值)和工作稳定可靠系数K2(K2=1.6~2.0,种子千粒质量大时,取大值),针对不同种子,在最大极限条件下,可求出气室所需最大吸种负压为[10]:

式中,m 表示单粒种子质量(kg);g 为重力加速度(m/s2);d 为吸种孔直径(cm);vp为吸种孔中心处线速度(cm/s);r 为吸种孔转动半径(m);λ 为种子的摩擦阻力综合系数,α 为种子自然休止角.
3.2 覆土装置
主要由覆土圆盘及覆土滚轮两部分组成.覆土圆盘主要完成膜边覆土及苗带供土作用,工作时将垄沟两侧的土推向垄沟并带入覆土滚轮,完成膜边及苗带覆土,通过调节其角度及入土深度可改变取土量大小.覆土圆盘、覆土滚轮与穴播轮的相互配置,见图5.覆土装置均采用弹簧连接的方式,通过调节弹簧可改变覆土圆盘及覆土滚轮对地表的压力,同时遇到障碍物时可自行抬起,实现过载保护的作用.覆土滚轮主要由拉杆、大(小)滚轮、调节轴等组成,见图6.

图5 覆土装置配置图Fig.5 Configuration diagrams of the casing soil device

图6 覆土滚轮结构图Fig.6 Structure sketches of the casing soil wheel
通过拉杆挂接在机架连接轴上,与覆土圆盘配合进行苗带覆土.拉杆由两部分组成,拉杆2 空套在拉杆1 中,可调节其前后位置.机具前进时通过拉杆带动滚轮前进,当覆土圆盘将土送入滚轮后通过大滚轮内的导土片及小滚轮内的挡土板共同实现苗带覆土.覆土滚轮通过螺钉固定在调节轴上,可对滚轮在一定范围内进行左右调节,满足不同种植模式的需要.
3.3 铺膜装置
铺膜装置主要由固定座、调节杆、地膜安装轮等部件组成(图7).通过调节杆可实现对地膜铺放高度的调节,同时可满足不同宽度的膜辊安装.设计的样机铺膜装置可满足宽度为800~1 200 mm 的地膜铺放,可通过高度调节满足不同作业条件下地膜铺放的要求,提高铺膜质量为后续成穴提供良好的作业条件.
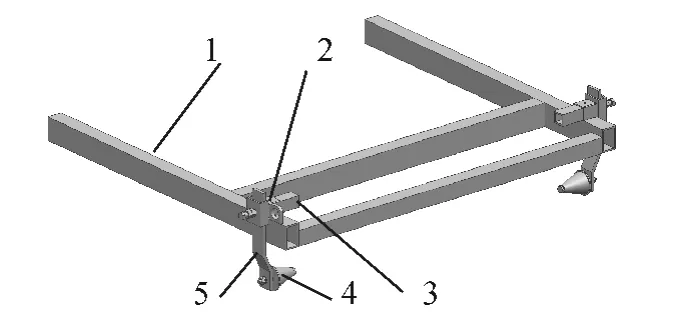
图7 铺膜装置结构图Fig.7 Structure sketches of the mulching film device
4 样机虚拟检测与制作
利用UG 软件对设计的机具进行整体装配及虚拟仿真运动分析,测试各运动部件的协调性、合理性,检验穴播机在运动过程中是否发生干涉,能否达到设计过程的预期效果,虚拟仿真过程如下.
先建立2BHQM-2 型覆膜穴播机零部件三维实体模型,虚拟装配穴播机,建立运动分析主模型(施加载荷,添加约束与驱动),然后定义测试内容,进行虚拟仿真分析,输出测试参数曲线及数据.最后,分析测试结果,进行结构与参数的优化设计.
在穴播轮三维实体主模型上依据实际工作中各部件的连接形式及结构特点在主模型上设定添加相应的边界条件、载荷、运动副等,添加约束时应根据实际情况选择约束的类型、作用点和方向,得运动分析模型.利用运动分析模型对成穴过程进行仿真,模拟成穴鸭嘴的入土、开启、出土过程,研究设定条件下成穴部件相关位置及参数是否满足设计要求.通过UG 中运动分析模块,分别在固定鸭嘴及活动鸭嘴的外圆尖点上建立测试点Marker1、Marker2,然后在后处理(Postprocessor)中用跟踪(Trace)Marker 点绘制出其运动轨迹曲线,对成穴性能进行测试.由整机装配及虚拟仿真运动分析结果可知,该机整体结构设计较为合理,各部件结构尺寸及运动过程较好地满足了设计需要,整机质量为236.5 kg(由于虚拟装配时省去了螺栓等连接件,整机质量比实际较轻),重心有些偏后,在此基础上对样机结构尺寸进行了相应的调整,使其重心接近中心位置.在虚拟样机设计的基础上进行了样机制作.
5 田间性能试验结果及分析
试验在江苏省农科院试验田进行,土壤类型为轻壤土,按照国家农业部标准NY/T 987-2006《铺膜穴播机作业质量》的要求[16],在满足作业效率的前提下,对该机的工作流畅性、可靠性及不同作业速度、吸种负压下作业效果进行测试.表1 为满足作业要求及条件下最高作业速度(机具作业速度为0.82 m/s,吸种负压为4.35 kPa)播种四粒红时测试结果,机具田间作业效果良好.
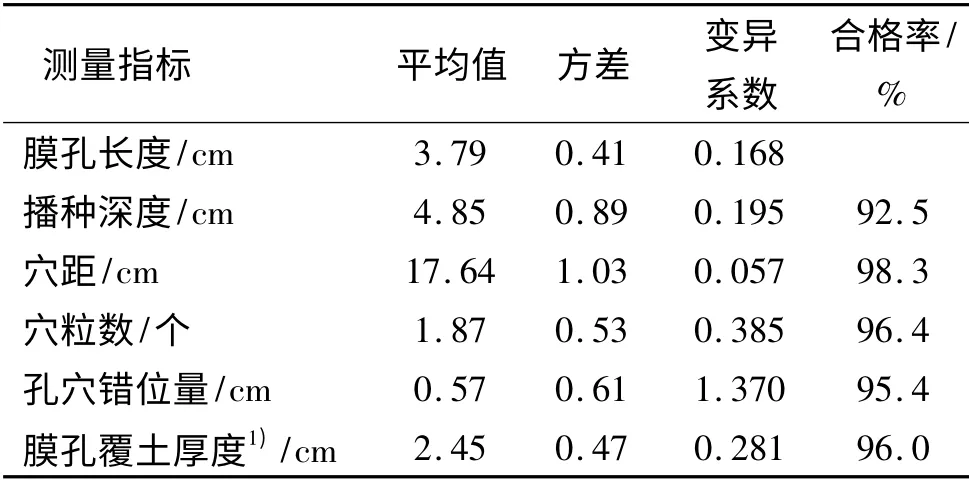
表1 性能试验结果Tab.1 The performance test results
由试验结果及分析可知:在满足作业效率的前提下,该机作业稳定、各部件工作流畅,成穴质量、播种质量等各项指标均满足气吸式覆膜穴播机作业技术要求;随着作业速度的增加,成穴部件撕膜、挑膜现象加剧,膜孔长度变大,均匀性变差,孔穴错位合格率降低,分析是由于随机具作业速度的增加,成穴部件对地膜及穴孔土壤的作用力加剧所致;随吸种负压增加,合格率增加的同时,重播率也相应提高;成穴过程出现部分穴播深度不能满足要求,甚至出现无法破膜现象,造成种子播种深度不足,有些种子播在膜上,分析原因主要由于苗带土壤坚实度过大或出现大块较硬的杂物,使成穴部件无法进入土壤造成;播种过程中存在漏播问题,分析原因除了排种器吸种问题外,还存在鸭嘴开启不及时或未开启的现象,这是由于土壤较松软,压板无法将鸭嘴及时打开或无法开启所致,此外夹杂引起鸭嘴关闭不严,造成漏播.
6 结论
利用UG 虚拟设计与仿真软件对气吸式花生覆膜穴播机进行了设计与研究,针对该机的作业特点及农艺要求,对该机关键部件进行了分析与设计,通过虚拟装配及运动仿真,测试组成部件相互间的协调性及结构设计的合理性,并通过对成穴部件的成穴过程及成穴轨迹的虚拟仿真,对其成穴性能进行了测试,在此基础上完成了样机制作.由样机田间性能试验结果可知,该机作业稳定、各部件工作流畅,成穴质量、播种质量均能较好地满足气吸式覆膜穴播机作业技术要求;虚拟仿真结果与该机实际情况较为一致,表明基于虚拟仿真技术的设计结果与测试结果是合理的,为穴播机的进一步研究奠定了基础.
[1]尚书旗,王方艳,刘曙光,等.花生收获机械的研究现状与发展趋势[J].农业工程学报,2004,20(1):20-25.
[2]张智猛,胡文广,许婷婷,等.中国花生生产的发展与优势分析[J].花生学报,2005,34(3):6-10.
[3]吕小莲,刘敏基,王海鸥,等.花生膜上播种技术及其设备研发进展[J].中国农机化,2012(1):89-92.
[4]卢勇涛,陈学庚,李亚雄.鸭嘴滚筒式气吸精量穴播器的设计与试验[J].中国农机化,2012(1):104-106.
[5]曹文,丁俊华,李在臣.精密穴播轮的研究与设计[J].农业装备与车辆工程,2009,211(2):21-25.
[6]杜瑞成,杨善东,郭志东,等.三种覆膜穴播成穴器方案设计与理论分析[J].山东理工大学学报:自然科学版,2003,17(2):15-18.
[7]王吉奎,坎杂,吴杰,等.夹持自锁式棉花精量穴播器的设计与试验[J].农业机械学报,2006,37(5):54-56.
[8]杨善东,杜瑞成,郭志东,等.联合作业穴播机的设计[J].农机化研究,2007(11):118-119.
[9]中国农业机械化科学研究院.农业机械设计手册[M].北京:机械工业出版社,1990.
[10]李宝筏.农业机械学[M].北京:中国农业出版社,2008.
[11]马旭,马成林,张守勤.地膜覆盖播种机成穴器的研究[J].农业机械学报,1989(4):20-27.
[12]陈学庚,王敏.气吸鸭嘴滚筒式精密穴播器关键因素的研究[J].农机化研究,2011(3):130-137.
[13]夏俊芳,许绮川,吴一鸣,等.旱作多功能精密穴播轮成穴机理的研究[J].农业工程学报,2001,17(5):11-14.
[14]刘文忠,赵满全,王文明,等.气吸式排种装置排种性能理论分析与试验[J].农业工程学报,2010,26(9):133-138.
[15]刘彩玲,宋建农,王清旭,等.气吸辊式水稻精量直播排种器的设计与试验研究[J].中国农业大学学报,2012,17(2):134-138.
[16]NY/T 987-2006.铺膜穴播机作业质量[S].北京:中华人民共和国农业部,2006.