电动车辆驱动控制系统仿真测试平台设计
2015-07-11邱斌斌朱绍鹏马浩军方光明应振有宁晓斌
邱斌斌,朱绍鹏,马浩军,方光明,应振有,宁晓斌
(1.浙江大学 动力机械及车辆工程研究所,浙江 杭州310027;2.众泰控股集团有限公司,浙江 永康321300;3.浙江工业大学 车辆工程研究所,浙江 杭州310014)
电动车辆的驱动控制系统按结构形式可分为单动力源驱动和包含轮毂电机在内的多动力源独立驱动;按功能则可分为基本驱动力控制、电子差速控制、驱动防滑控制等.因此,电驱动车辆控制系统具有结构多样、功能复杂等特点.
当前,很多学者都对电驱动车辆的驱动控制系统开展了深入研究并进行了样车试验[1-4].但是,在控制策略设计及仿真验证阶段多采用基于MAT-LAB/Simulink建立的理想车辆模型.理想的车辆模型忽略了车辆多自由度、风阻及路面条件等因素,同时较少考虑电机类型的差异化特性,因此,其仿真测试结果往往较为理想,并不能有效地验证复杂甚至极限工况下的车辆驱动控制效果.此外,由于电动汽车仍处于研发及小批量生产阶段,尚未达到大规模量产定型阶段,不同车型往往采用不同的驱动方式,匹配不同类型的电机及电池.若没有一个适用于不同车型的车辆驱动力控制系统仿真测试平台,就需不断构建整车、电机等模型,反复匹配驱动控制系统,这将大大延长研发周期,增加测试成本.
为了充分利用软件仿真测试速度快的优点,同时克服以往针对不同车型进行反复建模、匹配的缺点,本文设计了一个面向电动车辆、通用的驱动控制系统仿真测试平台.基于MATLAB/Simulink 和CarSim 两个软件搭建的仿真测试平台,采用模块化设计思想,集成了CarSim 车辆动力学模块库、整车驱动控制模块库、电机模块库及“人-车-路”观测模块.另外,利用该仿真测试平台,设计了前轮独立电驱动车辆的驱动力分层控制系统,并对其进行了多种危险工况下的仿真测试.
1 驱动控制系统仿真测试平台
1.1 设计方案
在仿真测试平台设计的过程中必须综合考虑系统约束,根据仿真需求确定的平台体系结构如图1所示.该仿真测试平台由MATLAB/Simulink、Car-Sim 软件及2个软件的数据交换通道构成,集成了CarSim 车辆动力学模块库、整车驱动控制模块库、电机模块库及“人-车-路”观测模块.采用模块化的结构使得当单一模块需重新配置时,只需修改相应模块内的参数,即可实现不同仿真环境的快速配置.设计的驱动控制系统仿真测试平台具有可配置性、可重用性及通用性.
1.2 仿真测试平台模块库
CarSim 软件的车辆动力学模块库具有多种高精度、可配置的车辆模型,还提供了各种复杂的外部道路环境,其参数化的建模方式、丰富的整车模型及子系统模块库降低了动力学建模的复杂度,被广泛运用于车辆的操纵稳定性、制动性及平顺性等分析[5-7].
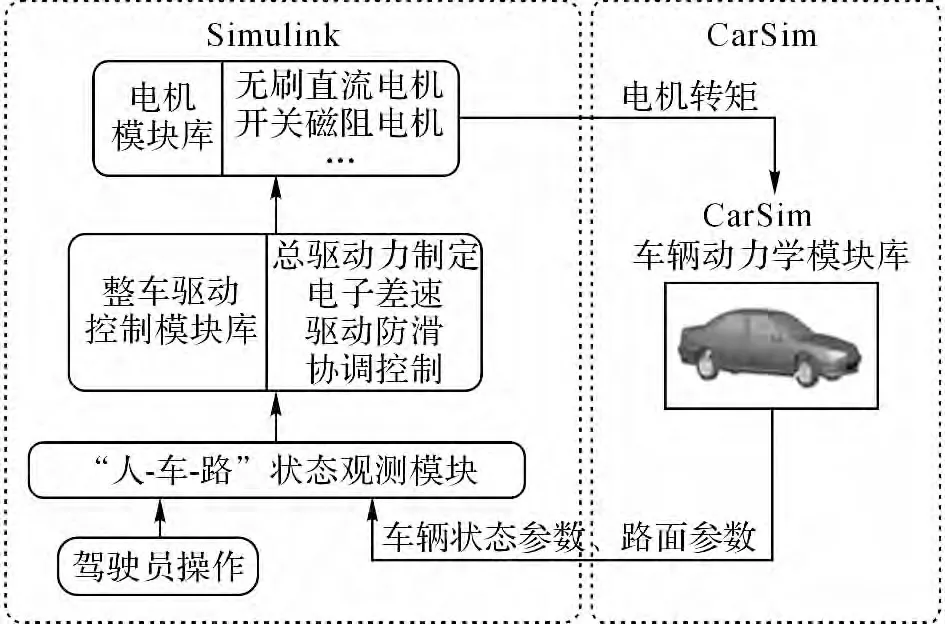
图1 电动车辆驱动控制系统仿真测试平台结构Fig.1 Structure of simulation and test platform for EV’s drive control system
利用MATLAB/Simulink 建立的整车驱动控制模块库目前包括总驱动力制定模块、电子差速模块、驱动防滑模块、协调控制模块.建立的电机模块库体现了电机模型的差异化,目前包括无刷直流电机模块和开关磁阻电机模块,其他电机模型的添加工作正在进行中.电机模块主要由电机动态模型及驱动控制部分组成,其中电机动态模型是对电机运行特性的数学建模,驱动控制部分模拟了电机控制算法.“人-车-路”观测模块主要用来获得和传递驾驶员操作、车辆状态参数及路面参数等信息.
2 基于仿真测试平台的驱动力分层控制系统设计
如图2所示,利用建立的电动车辆驱动控制系统仿真测试平台,针对前轮独立驱动电动汽车,设计了驱动力分层控制系统,并进行多工况下的仿真测试.图中,Fzi是各轮垂直载荷,ui为路面附着系数,Di为失效因子,ni为各轮转速,i代表各轮,δsw为方向盘转角输入,v为反馈车速,γ 为车辆实际横摆角速度,β为质心侧偏角,Vfl、Vfr分别为左前轮和右前轮轮毂电机的目标电压;Tfl_true、Tfr_true分别为左前轮和右前轮轮毂电机输出的真实转矩.
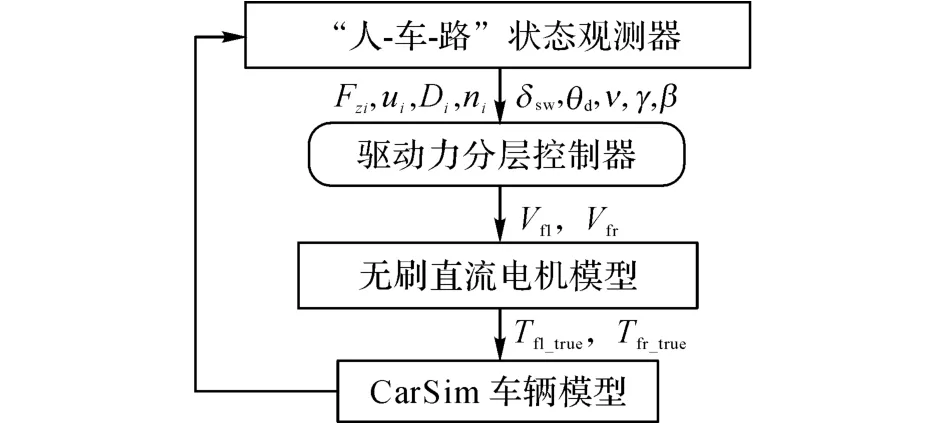
图2 基于仿真测试平台设计的驱动力分层控制系统框架图Fig.2 Framework diagram of driving force hierarchical control system based on test platform
根据车辆参数(见表1)修改CarSim 车辆动力学模块.同时,调用整车驱动控制模块库的总驱动力制定模块、驱动防滑模块及协调控制模块,设计整车驱动力分层控制器.另外,选取无刷直流电机模块作为前轮驱动电机.

表1 前轮独立驱动电动汽车车辆参数Tab.1 Parameters of EV with front-in-wheel-motors
2.1 整车驱动力分层控制器
整车驱动力分层控制策略的本质是直接横摆力矩控制,具有较好的动力学控制效果,且可补偿电机输出误差.如图3所示,设计的整车驱动力分层控制策略包括决策层、分配层、稳定层[1].
决策层的车辆参考模型根据来自“人-车-路”观测器的方向盘转角输入δsw、反馈车速v计算出期望横摆角速度γd和期望质心侧偏角;决策层将期望值γd、βd 与反馈的车辆实际横摆角速度γ 和质心侧偏角β 进行对比,经模糊控制得出期望横摆力矩Mzd;此外,调用的总驱动力制定模块依据油门踏板开度θd及设定的驾驶感受估算出车辆的期望驱动转矩Td.分配层考虑一定的约束条件,计算并分配前两轮的转矩Tfl、Tfr;稳定层则调用驱动防滑模块及协调控制模块,对转矩Tfl、Tfr进行修正及转换,最终算出前轮无刷直流电机的电压Vfl、Vfr.
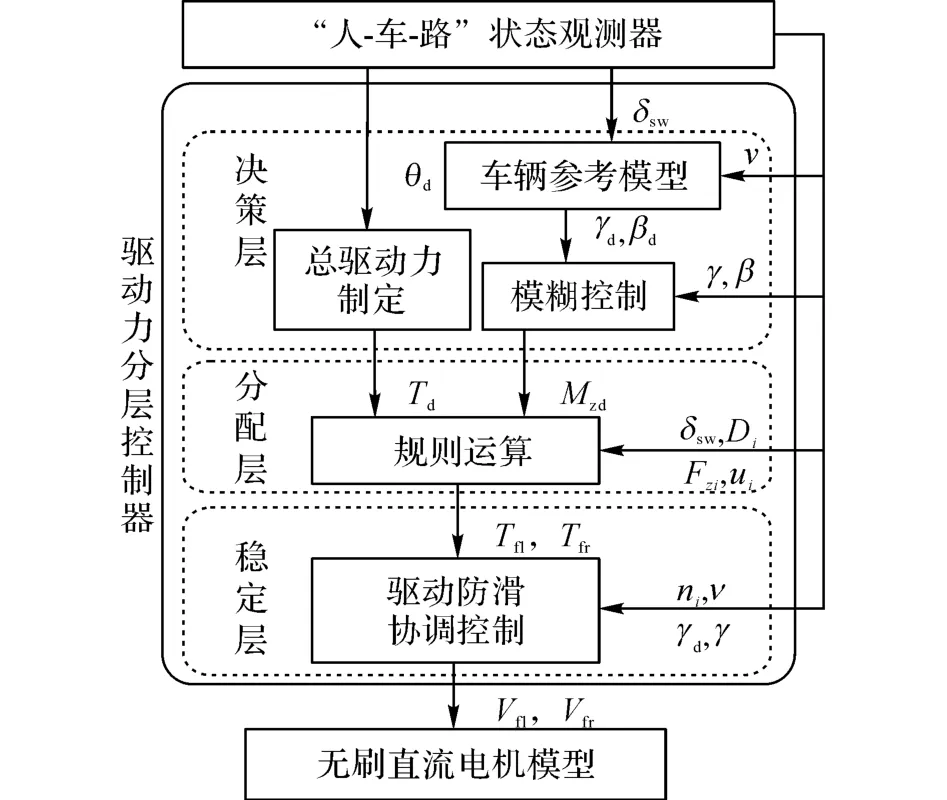
图3 整车驱动力分层控制器设计框架图Fig.3 Framework diagram of vehicle driving force hierarchical controller
2.1.1 决策层 当车辆的实际运动状态与理想状态之间存在偏差时,决策层根据模糊规则计算出修正车辆行驶的期望横摆力矩Mzd.采用双输入单输出的控制结构,输入为横摆角速度误差e(γ)=γdγ和质心侧偏角误差e(β)=βd-β,输出为期望横摆力矩Mzd.当车辆出现较大不足转向时,对车辆施加一个正向的横摆力矩来减小不足转向趋势,反之亦然.反模糊化方法选取面积重心法,经过输入变量的模糊化、模糊规则制定、清晰化,最后得到确定的输出变量Mzd,图4是制定的模糊逻辑规则三维视图,具体不再赘述[9].
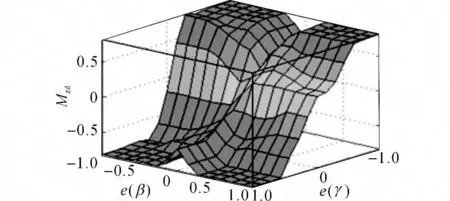
图4 模糊逻辑规则三维视图Fig.4 3Dview of fuzzy rule
2.1.2 分配层 驱动力分配层的输入是期望驱动转矩Td与期望横摆力矩Mzd(由车轮纵向力产生的修正横摆力矩),根据驱动力约束条件式(1)、转矩关系式(2)和基于3自由度的车辆模型[8]推出的横摆力矩关系式(3),可求得前轮理想转矩Tfl、Tfr,具有良好的实时性.

式中:Fxi、Fzi分别为各轮的纵向驱动力和垂直载荷;Tmax为电机最大输出转矩;Di为失效因子,表示电机、电机控制器或轮胎的状态,出故障时为0,正常为1.
2.1.3 稳定层 稳定层调用了驱动防滑模块及协调控制模块,驱动防滑采用滑转率差值的PI控制,协调控制则采用横摆角速度差值的PI控制.独立电驱动车辆驱动防滑控制会导致车辆产生非期望的横摆力矩,削弱车辆横向稳定性,在高速行驶尤其危险,因此,需要增加协调控制进一步控制车辆的行驶稳定性[10].
2.2 无刷直流电机模型
根据车辆参数及动力性能要求进行动力匹配,选用2个额定电压为72V、额定功率为5kW 的无刷直流轮毂电机.调用的无刷直流电机电流闭环控制模型[11-12]如图5,电机及其控制系统参数见表2.

图5 无刷直流电机模型Fig.5 BLDCM model
表2 电机及控制系统参数Tab.2 Parameters of motor and control system
3 仿真测试分析
为验证设计的整车驱动力分层控制系统及仿真测试平台的有效性,分别进行了前轮独立驱动电动汽车高速移线及在对开路面上的驱动防滑仿真测试.
3.1 高速移线仿真测试
模拟车辆在良好路面上高速做较大幅度车道变换的极限工况.假设车辆在附着系数为0.85路面上以95km/h稳定行驶后,对方向盘施加周期为12s、100°往复转向操作.仿真结果如图6所示.
由图6可以看出,左前轮驱动转矩在方向盘转角变化期间,由80N·m 上升至94N·m,之后下降到最小值74N·m,最后再回到80N·m;右前轮驱动转矩则由80N·m 下降至最小值68N·m,之后增加到88N·m,最后再回到80N·m,得到了理想的横摆力矩.同时,随着驱动轮驱动转矩的变化,驱动轮实际切向速度有小幅变化,相对于传统机械差速来说,更能使车辆稳定完成移线换道.表明了驱动分层控制策略在良好路面上以高速做较大幅度车道变换工况的有效性.
3.2 对开路面驱动防滑仿真测试
为验证驱动防滑+协调控制的控制策略的有效性,进行了对开路面工况下的仿真分析.模拟车辆以45km/h的时速加速行驶,遭遇低附着系数对开路面,即出现单轮滑转(仅右前轮滑转)工况,并与未受控制的仿真结果进行了对比分析.
具体设定:路面纵向0 m 到50 m 的路面附着系数为0.38,50 m 之后车辆左侧路面附着系数不变,右侧路面附着系数降为0.1.路面信息及仿真结果如图7所示.
针对仅右前轮滑转这一工况,分层驱动控制系统对右前轮采用单轮驱动防滑控制,对左前轮进行基于理想横摆角速度的协调控制.由图7可知,仅带驱动防滑未带协调控制的车辆在50 m 之前,车辆还能保持直线稳定行驶;在50m 之后,横摆角速度迅速变化,车辆发生较大横向侧滑而不断偏离直线行驶轨道.带驱动防滑+协调控制的车辆由于前两轮的驱动转矩被实时调节,在实现驱动防滑的同时,很好地控制了车辆横向侧滑,保证了行驶的稳定性,验证了该方法的有效性.
总结以上仿真结果,设计的驱动力分层控制系统能够实时、有效地对驱动轮转矩进行控制,实现了差速、驱动防滑及协调控制等基本控制功能.同时,也验证了所设计的驱动控制系统仿真测试平台的有效性.
4 结 论
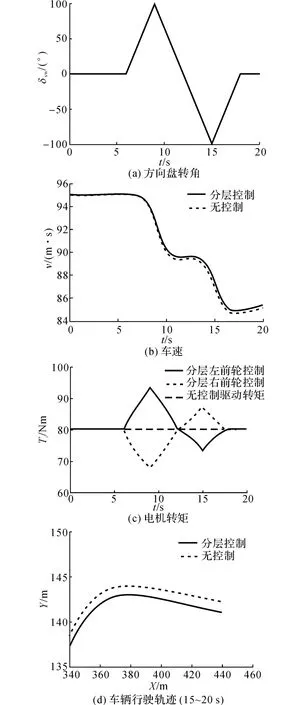
图6 高速移线工况Fig.6 Line change in high speed condition
基于搭建的电动车辆驱动控制系统仿真测试平台,设计了前轮独立驱动电动汽车的驱动力分层控制系统,并在多种复杂工况下进行了仿真测试.仿真结果表明:
(1)搭建的驱动控制系统仿真测试平台具有可配置性、可重用性及通用性.
(2)设计的驱动力分层控制系统能够在不同工况下对车辆驱动转矩进行合理分配,较好地实现了电子差速功能.另外,该控制系统在防止驱动轮过度滑转的同时,较好地控制了整车的横摆角速度,保证了车辆的动力性及稳定性.

图7 对开路面仿真结果Fig.7 Simulation result on bisectional road
今后,该仿真测试平台的完善工作主要集中在改善人机交互界面、不断扩充模块库,进一步方便电动车辆驱动控制系统的开发及测试.
(
):
[1]王博.四轮独立电驱动车辆实验平台及驱动力控制系统研究[D].北京:清华大学,2009.WANG Bo.Study on experiment platform of fourwheel-independent-drive EV and its driving force control system[D].Beijing:Tsinghua University,2009.
[2]褚文博,罗禹贡,赵峰,等.分布式驱动电动汽车驱动转矩协调控制[J].汽车工程,2012,34(3):185-196.CHU Wen-bo,LUO Yu-gong,ZHAO Feng,et al.Driving torque coordination control of distributed drive electric vehicles[J].Automotive Engineering,2012,34(3):185-196.
[3]靳立强,王庆年,岳巍强,等.基于四轮独立驱动电动汽车的动力学仿真模型[J].系统仿真学报,2005,17(12):3053-3055.JIN Li-qiang,WANG Qing-nian,YUE Wei-qiang,et al.Dynamic model for simulation of EV with 4independently-driving wheels[J].Journal of System Simulation,2005,17(12):3053-3055.
[4]靳立强,王庆年,宋传学.电动轮驱动汽车动力学仿真模型及试验验证[J].吉林大学学报:工学版,2007,37(4):745-750.JIN Li-qiang,WANG Qing-nian,SONG Chuan-xue.Dynamic simulation model and experimental validation for vehicle with motorized wheels[J].Journal of Jilin University:Engineering and Technology Edition,2007,37(4):745-750.
[5]WANG Qian-nan,ZHAI Li,WANG Jie,et al.Study on acceleration slip regulation torque distribution control strategy for four in-wheel-motors electric vehicle steering[C]∥Control and Decision Conference (CCDC),2013 25th Chinese.[S.l.]:IEEE,2013:3832-3837.
[6]郭孔辉,付皓,丁海涛,等.基于CarSim RT 的车辆稳定性系统控制器开发[J].汽车技术,2008(3):1-4.GUO Kong-hui,FU Hao,DING Hai-tao,et al.Development of controller for vehicle stability system based on CarSim RT[J].Automobile Technology,2008(3):1-4.
[7]于长淼,王伟华,王庆年.馈能悬架阻尼特性及其影响因素[J].吉林大学学报:工学版,2010,40(6):1482-1486.YU Chang-miao,WANG Wei-hua,WANG Qing-nian.Damping characteristic and its influence factors in energy regenerative suspension[J].Journal of Jilin University:Engineering and Technology Edition,2010,40(6):1482-1486.
[8]皮大伟,陈南,王金湘.模糊逻辑在车辆稳定性控制系统中的应用[J].东南大学学报:自然科学版,2008,38(1):44-48.PI Da-wei,CHEN Nan,WANG Jin-xiang.Application of fuzzy-logic to vehicle stability control system[J].Journal of Southeast University:Natural Science Edition,2008,38(1):44-48.
[9]刘孝龙.多轮独立驱动电动汽车驱动力控制系统研究[D].杭州:浙江大学,2013:21-27.LIU Xiao-long.Study on driving force control system of multi-wheel-independent-drive electric vehicle[D].Hangzhou:Zhejiang University,2013:21-27.
[10]吴志军.多轮独立驱动电动汽车驱动控制系统设计[D].杭州:浙江大学,2014:38-46.WU Zhi-jun.Design of driving control system for multi-wheel-independent-drive electric vehicle[D].Hangzhou:Zhejiang University,2014:38-46.
[11]LIU Xiao-long,ZHU Shao-peng,WU Zhi-jun.Dynamic modeling and acceleration control of electric vehicles[J].Advanced Materials Research,2012,476-478:944-948.
[12]汪贵平,马建,杨盼盼,等.电动汽车起步加速过程的动力学建模与仿真[J].长安大学学报:自然科学版,2009,29(6):98-102.WANG Gui-ping,MA Jian,YANG Pan-pan,et al.Dyanmic modeling and simulation of starting and acceleration for electric vehicle[J].Journal of Chang’an University:Natural Science,2009,29(6):98-102.
