基于PLC的风力发电控制系统设计
2015-07-07吕淑平
孙 蓉,李 冰,苏 丽,吕淑平,于 鑫
(哈尔滨工程大学自动化学院,黑龙江哈尔滨 150001)
基于PLC的风力发电控制系统设计
孙 蓉,李 冰,苏 丽,吕淑平,于 鑫
(哈尔滨工程大学自动化学院,黑龙江哈尔滨 150001)
利用可编程序控制器PLC实现了风力发电机的偏航控制、变桨距角控制、自启动控制等功能,并对控制系统进行了仿真与测试,设计了风力发电机控制系统的WinCC监控组态界面,实现了风力发电机组的实时监控功能。
风力发电;控制系统;可编程控制器;WinCC监控
风能作为一种清洁的能源,越来越受到世界各国的重视,风能已经成为除水能以外,技术最成熟、最具有规模化开发条件和商业发展前景的能源之一。近20年来,风力发电技术得到了飞速发展。其中,德国、西班牙、丹麦、美国等欧美国家在风能研究和利用方面涉足较早,在风力发电理论和技术方面处于世界领先地位。相比之下,国内在风力发电理论研究和风力发电控制技术方面与欧美发达国家相比还存在着较大的差距[1]。
由于风能是一种具有随机性和不稳定性等特点的低密度的能源,因而控制技术是否达到相应的要求就成为了风力发电机安全、高效运行的关键,它不仅影响着风力发电装置整体结构的复杂性以及风力发电系统的效能,同时也直接影响着输出电能的质量和稳定性。因此,研制出一套适合于风电转换、安全高效、性能出色的发电机系统以及先进的配套控制技术是风力发电技术得到推广应用的关键[2]。本文的研究目的是为了解决风力发电机组在复杂多变的外界环境下如何安全平稳运行,并尽可能多地将风能转化为电能、平稳地送入电网,实现良好供电性能的问题。为实现风机依据变化的风的方向,能始终正对风向,最大限度地从获取风的能量,本文以西门子PLC为控制器,设计偏航控制算法;为防止风速超过额定风速时,风机输出功率过高可能对硬件设备的损害,设计功率控制算法,通过桨距角控制限制风机吸收功率;最后通过设置各种参数超标处理过程使风机可以安全平稳运行。
1 风力发电机控制系统硬件结构
风力发电机控制系统(见图1)的硬件系统主要包括可编程控制器(PLC)、风机组件以及并网系统,本设计中控制器采用的是西门子公司的S7-1200系列中的PLC作为控制系统的控制器,风力发电机则采用的是变速变桨距风力发电机(双馈异步发电机)。
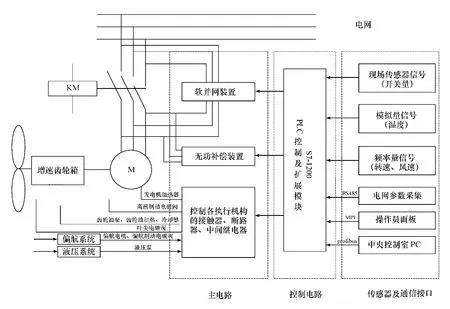
图1 风力发电系统
风力发电机组由风轮组件、传动系统、发电机系统、偏航和解缆系统以及辅助系统组成。需要重点说明是的偏航和解缆系统,因为该部分将决定整个控制系统的大部分需求指标[3]。偏航系统主要由风向标、偏航马达、偏航轴承构成。这是一个伺服系统,当风向及风轮的主轴存在一定的角度偏差时,经过一定的时间后控制系统将控制用于偏航控制的异步电机带动风轮旋转,将风轮和风向调整到一致的方位[4]。同时将会有一个风向标安装在风轮前部或者机舱的一侧,风向标的作用是当风力发电机组的风轮主轴和风向标的指向存在一定的偏离角时,风力发电机组的控制系统便开始计时,当存在偏离角的时间达到一定的值时,即认为风向已改变,计算机发出向左或向右调向的指令,直到偏差消除。为了使风力发电机从风中获得最大的能量,同时由于风力发电机控制系统可能会连续地执行偏航控制,这就有可能导致连接风力发电机的机舱与塔架的电缆发生缠绕,当风力发电机连续朝同一个方向执行偏航达到1 080°(3圈)时,偏航控制系统将会驱动偏航机构执行自动解缆,从而保证了整个系统能够正常的运转[5-10]。
2 风力发电机控制系统软件设计
风力发电机控制系统的软件设计主要包括控制方案设计和控制程序的编写。本设计中控制方案主要采用传统的PID控制,控制程序的编写则采用梯形图语言。
2.1 总体方案设计
不同于一般的工业控制过程,风力发电机组的控制系统是一个非常具有综合性的控制系统。它不仅需要针对当前的风速与风向的变化,并根据指定的控制方案对风力发电机组进行优化控制,以达到提高发电量和机组的运行效率的目的,同时还要监视电网参数、当前风况以及风力发电机组的运行参数[11-12]。变桨距风力发电机组采用的是启动时进行转速控制、并网后进行功率控制的方案。这种控制方案大大提高了风力发电机的起动性能和功率输出特性[13]。此时的液压系统自身已经组成了闭环控制系统,不再只是简单的执行机构,液压系统通常采用的是电液伺服阀或者电液比例阀,这种结构大大提高了控制系统的控制水平,同时也显著改善了控制系统的控制效果。目前投入使用的绝大多数风力发电机组都采用分布式工业控制计算机作为风力发电机系统的控制系统。分布式控制系统可以方便地实现就地控制,可直接在控制对象的工作点布置所需要的任何模块,可以就地采集信号并进行相应的处理[14-15]。风力发电机组的控制系统结构框图见图2。
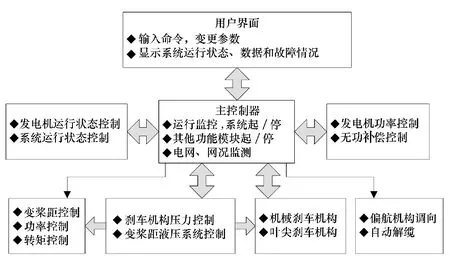
图2 控制系统框图
本风力发电机控制系统以西门子公司生产的S7-1200 PLC进行控制,具有全自动自启动、偏航控制、变桨距角控制等功能。本风力发电机控制程序主要包括主程序(OB1)、偏航控制程序(功能FC1)、桨距角控制程序(功能FC2)以及风力发电机全自动自启动控制程序(功能FC3)和风力发电机组远程监控控制程序(功能FC4),其基本结构图见图3。
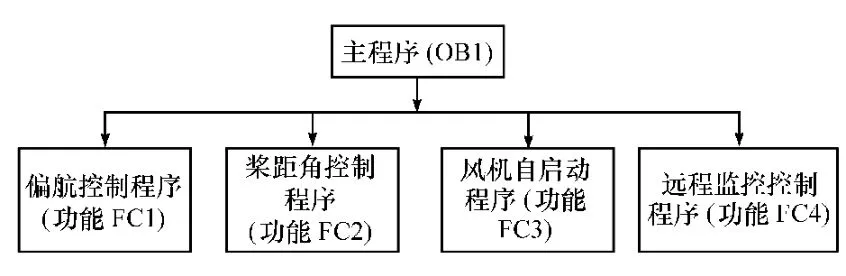
图3 系统程序结构图
风力发电机控制系统控制主程序流程图见图4。
2.2 偏航控制程序设计
风力发电机控制系统的偏航控制可以分为自动偏航控制和自动解缆控制。由于风的方向始终处于变化之中,偏航控制所实现的功能是如果当前的风向和风力发电机的风轮正对方向之间产生一个偏差角且该角度超过5°时,必须进行偏航控制,确保风力发电机正对风向,从而尽可能大地从风中获得能量。其程序流程见图5。
解缆控制是指当风力发电机朝一个方向连续偏航超过3圈(±1080°)时,为了防止内部电缆发生缠绕而导致风力发电机设备受损,需设计解缆控制程序,从而保证机组的安全、稳定运行。其程序流程图见图6。
偏航控制主程序主要由参数计算程序、解缆控制程序、偏航控制子程序和停止偏航程序构成。其中参数计算程序的作用是根据安装在风力发电机机架上的风向标检测到的风向值和风机上的偏航码盘检测到的风机偏航角计算出当前的风向角与偏航角的差值。偏航控制是根据计算出的差值决定是否进行偏航控制。解缆控制则是根据已连续朝同一个方向进行偏航的角度值决定是否应该进行解缆控制。
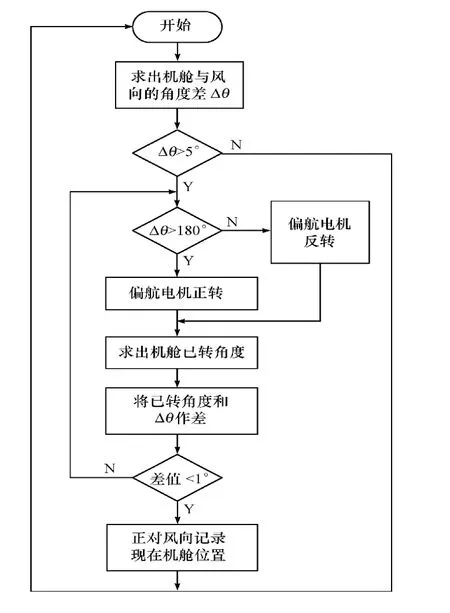
图5 自动偏航流程图
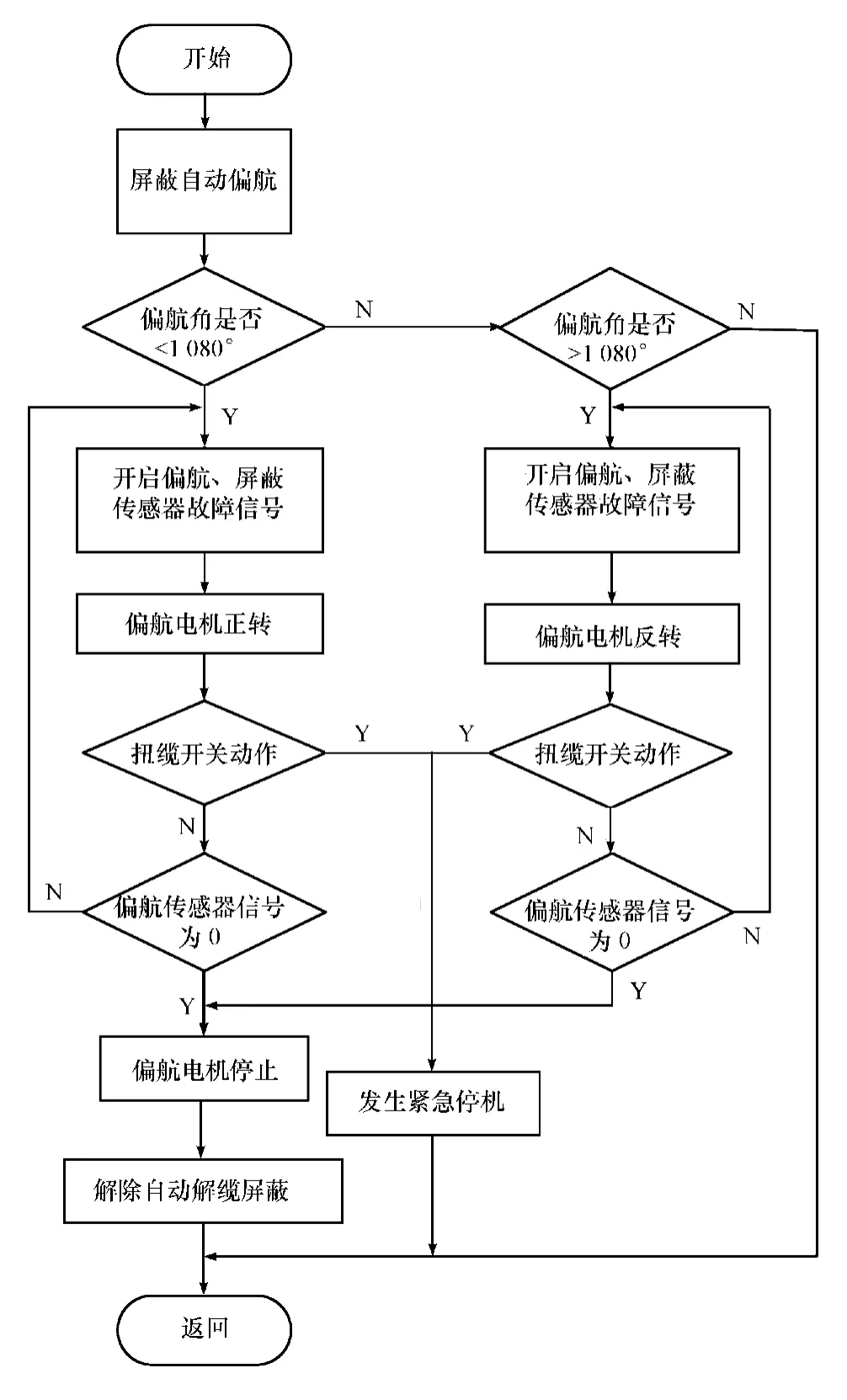
图6 自动解缆流程图
2.3 变桨距控制程序设计
变桨距控制所实现的功能是:如果当前的风速不满足系统要求的启动风速(4 m/s)时,桨距角将被控制系统控制在90°不变,风机叶片此时不运转,紧接着调整桨距角,使风力发电机的启动转矩逐渐增大,加快启动速度;当风速达到切入风速(4 m/s)以后,桨距角调节到0°不变,尽可能多地从风中获取能量;当风速高于额定风速(12 m/s)时,为了使输出功率保持恒定,也为了限制风力发电机的吸收功率以保证风力发电机组的安全运行,引入了变桨距控制策略,通过调整桨叶的桨距角来调整功率的变化;当风超过切出风速(25 m/s)时,控制系统将桨距角调整为90°顺风,此时风机叶片和塔架的受力最小从而保证了风力发电机组的安全、稳定运行。本程序中桨距角调节分为两种情况,一种是有功功率在300 k W~340 k W之间的精确调节,另一种是在300 k W ~340 k W范围之外的粗略调节。变桨距控制流程图见图7。
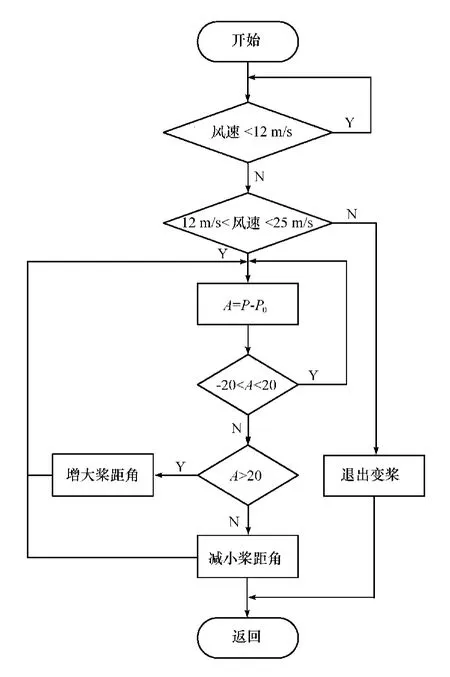
图7 变桨距控制流程图
2.4 全自动启动程序设计
风力发电机全自动启动程序所实现的功能是按照开机步骤实施风机全自动开车,保证开车稳步进行。在开车过程中,叶片上的升力和阻力与桨距角之间呈现非线性关系,要保证随着桨距角的减小,风机的升力始终大于阻力,确保风机转速达到额定转速附近。与此同时,当风力发电机的输出功率达到一定的额定值之后,自动将风力发电机并入电网送电。全自动启动程序见图8。如果当前风速≥4 m/s,则计数器加1,如果不满足则计数器清零。如果当计数器的值计满10 时,输出一个“风速10 s大于4”的信号,并将计数器清零。这两句程序的作用是判断是否满足风速≥4 m/s的条件,如果满足条件,则风力发电机开始执行偏航控制。
3 风力发电机组控制系统测试与仿真
风力发电机控制系统的主要任务,就是通过对发电机转速的调节使发电机吸收的功最大,而又不超过风力发电机的额定功率,或者是在需要降低吸收功率的情况(停机等)下将发电机的输出功率调节到需要的功率值。本节主要模拟在自然风况下,根据风速和风向的变化进行偏航控制和变桨距角控制,目的是使输出功率曲线稳定。
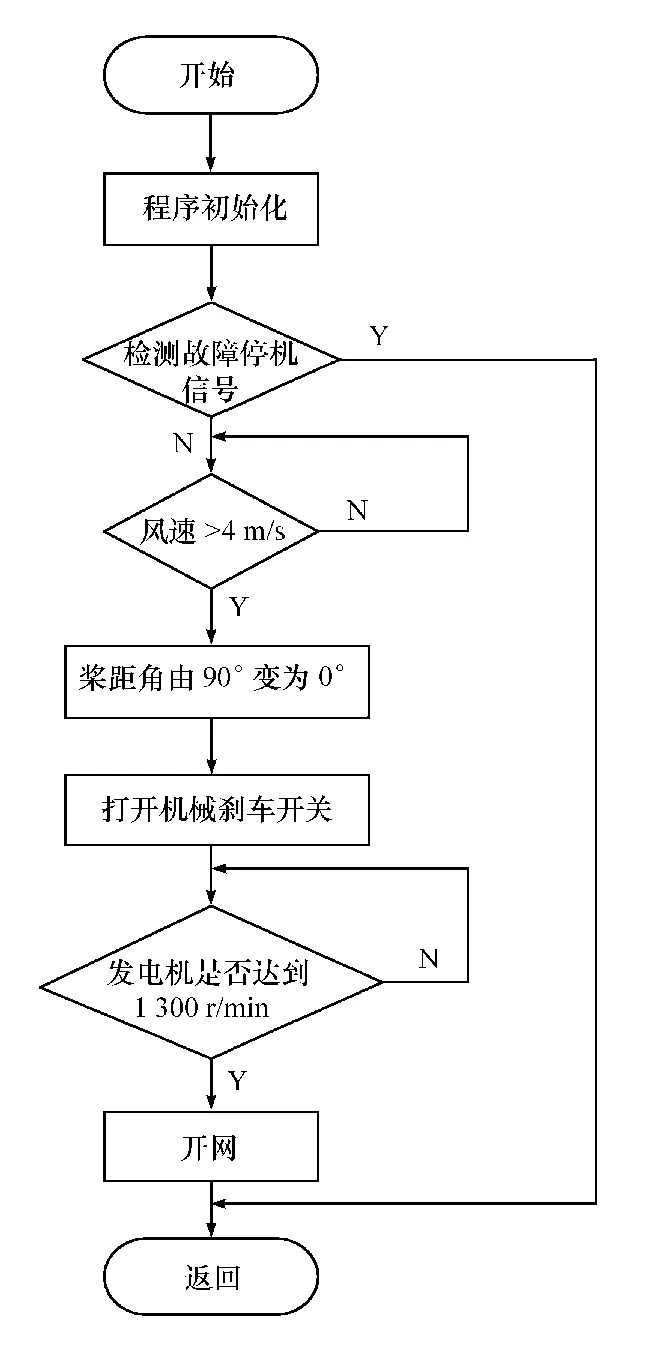
图8 全自动启动程序流程图
3.1 仿真结果
仿真以自然风况为输入,利用E-Wind Turbine和WinCC软件进行模拟仿真,仿真结果见图9。
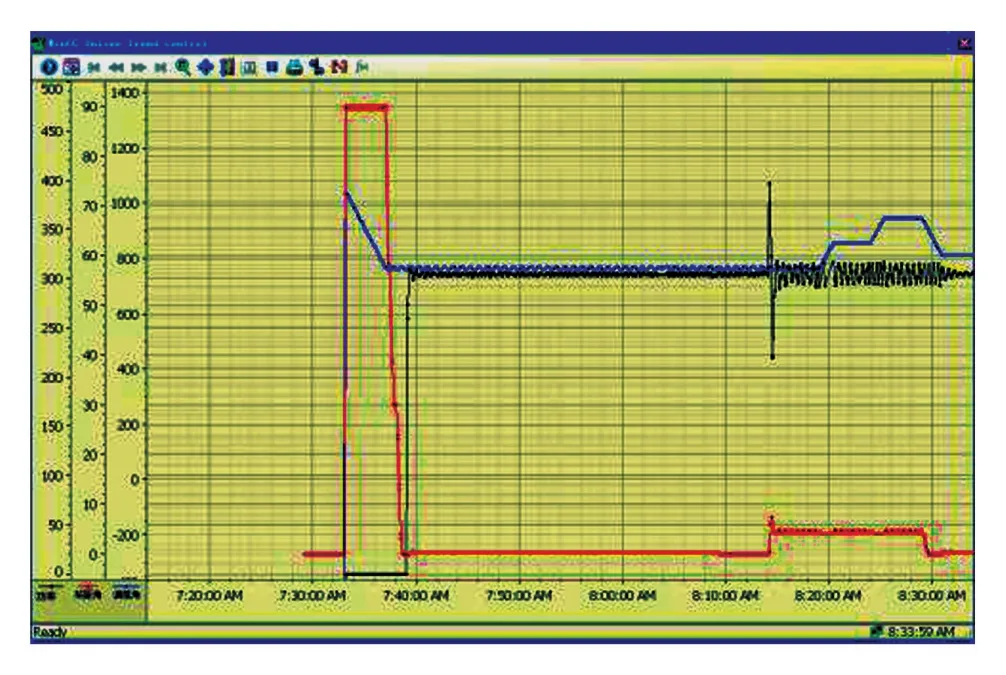
图9 风力发电机控制系统仿真曲线
其中黑色曲线为风力发电机的输出功率变化曲线,红色曲线为风力发电机的叶片桨距角变化曲线,蓝色曲线为风力发电机风轮偏航角变化曲线。
3.2 仿真结果分析
(1)偏航控制仿真结果分析。偏航控制的作用是保证风机始终正对风向,最大限度地从风中获取能量。当风向角与风机偏航角之差超过5°时,需要进行偏航控制。当风机偏航超过3圈(±1 080°)时,需进行偏航解缆控制,防止内部电缆发生缠绕。
由仿真结果中的偏航角曲线可知:在风力发电机刚开始投入运行的时刻风力发电机的偏航角接近正方向1 000°;随着风向的逐渐变化,由风力发电机控制系统产生的控制作用使风机逐渐跟随风向的变化而正对风向,在相当长的一段时间内偏航角基本维持在正方向700°左右;当风向继续变化时,风力发电机的偏航角继续跟随风向的变化保持正对风向。由此可得出结论,该风力发电机控制系统中的偏航控制系统能够根据当前风向的变化调节偏航角正对风向,从而能够保证风力发电机组正常运作,并从风中获取最大的能量。
(2)变桨距控制仿真结果分析。变桨距控制的作用是通过对桨距角的控制调节发电机的转速,从而控制发电机的吸收功率。当风速低于额定风速时调整桨距角获得最大功率,当风速超过额定风速、风机输出功率过高可能致使硬件设备受损时,通过桨距控制限制风机吸收的功率,保证机组的安全、稳定运行。
由仿真结果中的桨距角曲线可知:在当前风速低于额定风速(12 m/s)时,控制系统调整桨距角为最小值0°,从而使发电机获得最大的功率;在当前风速高于额定风速时,控制系统将会增大桨距角,从而限制发电机的吸收功率;当遇到特大强风时,控制系统调整桨距角为90°,此时风力发电机的桨叶和塔架受风最小,叶片处于顺风位置,这就确保了风力发电机组免受损坏。由此可得出结论,该风力发电机控制系统中的桨距角控制能够根据当前的风速和风力发电机的功率调整桨距角的大小,从而在保证了风力发电机从风中获取最大能量的同时也把风力发电机的输出功率限制在一个相对安全的额定值以下。
(3)风机自启动控制仿真结果分析。风力发电机全自动启动控制程序所实现的功能是按照开机步骤实施风机全自动开车,保证开车稳步进行。由仿真结果可知,该风力发电机控制系统的自启动控制能够在不借助外力的情况下按照开机步骤安全开机,并且当风机遇到紧急故障的情况下系统能够根据安装在风力发电机各个位置的传感器反馈的信息实现紧急制动,从而保证了风力发电机组的正常运行。
风力发电机控制系统的核心任务就是保证发电机的输出功率最大且不超过额定功率。由仿真结果中的功率曲线可知,风力发电机的有功功率基本上都保持在320 k W左右,当风速或者风向有突变的时候风力发电机的有功功率也会有相应的变化,但是经过较短时间的调整之后风力发电机的有功功率又能回到原来的值。
由以上可得出结论:该风力发电机控制系统能够实现预定的控制目标,最终能够保证风力发电机的输出功率稳定在一个相对较高且不超过风力发电机额定功率的值,从而在保证了风力发电机组的发电质量的同时也保证了风力发电机组能够安全、高效的运行。
3.3 WinCC监控界面
WinCC(windows control center)是SIMATIC PCS 7过程控制系统及其他西门子控制系统中的人机界面组件。它是第一个具有良好的开放性和灵活性的过程监视系统,WinCC集生产自动化和过程自动化于一体,实现了相互之间的整合,并大量应用于各种工业领域中。
本控制系统中WinCC监控界面(见图10)主要用来实时监测风力发电机组的外部环境变化和风机的运行参数。包括当前的风速、风向、风轮转速、发电机转速以及风力发电机的偏航角、桨距角、功率等参数。用户可以根据WinCC提供的参数调整控制命令,从而保证风力发电机组安全、高效的运行。

图10 WinCC监控界面
4 结束语
风能以其清洁性和可持续性,已经成为除水能以外,技术最成熟、最具有规模化开发条件和商业发展前景的能源之一。风力发电是风能利用的主要形式,而控制系统又是风力发电机组最为核心的部分,因此对风力发电机控制系统的研究显得尤为重要。本文以风力发电机组为研究对象,对风力发电机控制系统的总体功能进行了设计与分析,并基于西门子S7-1200 PLC设计,实现了风力发电机的安全运行并最大限度地从风力中捕获能量。风力发电机控制系统采用随机逻辑方式控制,完成了如偏航控制程序设计、变桨距角控制程序设计、风力全自动启动程序设计等。在完成了系统控制方案和程序的设计之后,用仿真软件对控制系统进行测试与仿真,达到了预期的控制效果,并且为控制系统设计了WinCC监控界面,保证风力发电机安全、高效的运行。
References)
[1]周宏林.大容量双馈式风力发电系统并网关键问题研究[D].北京:清华大学,2011.
[2]王小鹏.基于小波变换和数据挖掘的风电机在线故障诊断[D].兰州:兰州理工大学,2010.
[3]杨通.基于PLC变桨距风力发电控制系统的研究[D].保定:华北电力大学,2011.
[4]李彦龙.风力发电机变桨距控制技术的研究[D].呼和浩特:内蒙古大学,2012.
[5]张尚云,齐向东.基于PLC的风力机变桨距控制系统研究[J].机械工程与自动化,2011(5):147-149.
[6]钱江海,谢源,焦斌.基于PLC的风力发电机组变桨系统[J].上海电机学院学报,2011(5):302-305.
[7]金利祥,张德华,陈绍聂,等.基于PLC的风力发电机组控制系统研究[J].机电工程,2012(2):188-191.
[8]刘彬.风力发电液力调速系统及其控制研究[D].长春:吉林大学,2012.
[9]窦金延,曹娜,于群.变速恒频风力发电机组控制系统仿真[J].风机技术,2011(2):55-58.
[10]周海波.变速变桨距风力发电机气动特性和运行特性的研究[D].重庆:重庆大学,2012.
[11]孙蓉.西门子S7-300/400PLC实践与应用[M].北京:机械工业出版社,2013.
[12]李冰,郑秀丽,孙蓉,等.可编程控制器原理及应用实例[M].北京:中国电力出版社,2011.
[13]Miao Weiwei,Jia Hongjie,Wang Dan,et al.Active power regulation of wind power systems through demand response[J].Science China Technological Sciences,2012,55(6):1667-1676.
[14]Damir Crnkovié,DamirŠljivac,Marinko Stojkov.Influence of wind power plants on power system operation-Part one:Wind power plant operation and network connection criteria[J].Technical Gazette,2010,17(1):101-108.
[15]Qi Zhiyuan,Lin Eerduntaokesu.Integrated power control for small wind power system[J].Journal of Power Sources,2012,217 (11):322-328.
Design of wind power generation control system based on PLC
Sun Rong,Li Bing,Su Li,LüShuping,Yu Xin
(College of Automation,Harbin Engineering University,Harbin 150001,China)
In addition to the water energy,the wind energy as a clean and renewable energy has become the most mature way of electricity generation which is with the largest scale,and has the most promising commercial development.The wind power generation is the main form of wind power,and the wind turbine is the main equipment to convert the wind energy into the electric energy,in which the control system is the most important component.This paper completes the yaw control,active pitch control,and the automatic startup control of the wind power generator.Finally,it simulates and tests the control system,and designs the interface of the WinCC of the wind turbine control system to realize the online monitoring function of the wind turbine.
wind power;control system;PLC;WinCC monitoring
TM614-33
A
1002-4956(2015)4-0086-06
2014-09-03修改日期:2014-11-01
黑龙江省高等教育学会高等教育科学研究“十二五”规划课题“基于乐-学-思-创”理念的自动化专业多元化教学方法研究与实践”(HGJXHC110370);黑龙江省教育教学改革项目“创建‘三引领五平台’培养模式,培养自动化学科拔尖创新人才”(JG2013010203);黑龙江省高等学校教改工程项目“基于科研素质培养的‘创新认知与实践’课程建设与实践”(JG2012010147);哈尔滨工程大学教育教学改革研究项目“PLC课程‘金字塔’式教学体系构建研究与实践”(JG2013YB20)
孙蓉(1978—),女,山东肥城,工学博士,讲师,研究方向为控制理论与控制工程.
E-mail:sunrong@hrbeu.edu.cn