基于ADVISOR二次开发的混合动力系统设计与仿真研究
2015-07-07陈刚,武蕾
陈 刚,武 蕾
(1.三明学院 机电工程学院,三明 365004;2.三明机械CAD工程研究中心,三明 365000)
0 引言
环境保护部最近发布的《2013年中国机动车污染防治年报》显示,机动车的尾气排放已成为我国空气污染的重要来源[1]。混合动力汽车和电动车是当前改善或解决汽车尾气污染的一个行之有效的方法之一。计算机仿真是研究混合动力汽车的重要手段,有利于缩短研发周期,降低研发成本[2]。目前,国内外研究者研究混合动力汽车使用的计算机仿真软件主要有CRUISE、CarSim、PSAT和ADVISOR[3],其中ADVISOR是在MATLAB/SIMULINK环境下采用模块化的编程语言,最大的优点在于其代码完全公开,便于使用者自主掌握和二次开发[4,5]。ADVISOR是由美国National Renewable Energy Laboratory开发,采用后向仿真为主、前向仿真辅助的混合仿真方法,主要可以实现车辆总成参数匹配与优化、车辆动力性能与经济性仿真分析、车辆能量管理策略评价等功能[6]。但是,ADVISOR软件也有自身的缺陷,它提供的汽车仿真模型是有限的,只适合于单轴前轮驱动的车辆仿真。本文针对某后轮驱动的混合动力城市客车,以MATLAB/SIMULINK为平台,利用其开放的代码和内部通用的子模块,对ADVISOR软件进行二次开发,建立整车仿真模型,并进行仿真分析,为该车的研制提供了有力的依据。
1 ADVISOR混合动力仿真系统二次开发
1.1 混合动力系统结构与工作原理
文中所研究的混合动力汽车是一后轮驱动的城市公交车,其动力系统采用并联式结构,系统结构组成如图1所示。动力系统中采用了ISG电机,ISG是起动发电一体机,在混合动力汽车有较多的应用。动力系统可以实现多种工作模式,如:1)在车辆起步或低速运转,且蓄电池的荷电状态SOC值大于下限值时,发动机关闭,由蓄电池组给ISG电机供电驱动车辆;2)当车辆在中高速运转时,发动机效率较高,蓄电池组停止工作,由发动机单独驱动车辆;3)当需求转矩大于发动机能提供的转矩时,发动机与蓄电池组同时工作,共同提供转矩驱动车辆[7];4)车辆在怠速、制动、下坡时,机械能经ISG电机产生电能并存储于蓄电池组中。

图1 并联式混合动力系统
1.2 混合动力系统仿真模型的二次开发
混合动力系统采用的是后轮驱动形式,而ADVISOR软件原有的仿真模型只有前轮驱动,差异性较大。为了达到研究目的,因此需要对ADVISOR中相关的仿真模块进行二次开发。
ADVISOR中前驱仿真模型的建立思路是,首先建立并求解出车辆在坡度路面的动力学方程,再依据动力学方程创建SIMULINK模型。下面对坡度路面的后轮驱动车辆进行受力分析,如图2所示,假设此时车辆是极限附着,车辆初始速度为V0,在最大附着力Fmax下产生的最大末速度为Vt。其中,FW、Ff、Fi分别是车辆所受的空气阻力、滚动阻力和坡度阻力,Fn是驱动轮所受的垂直载荷。
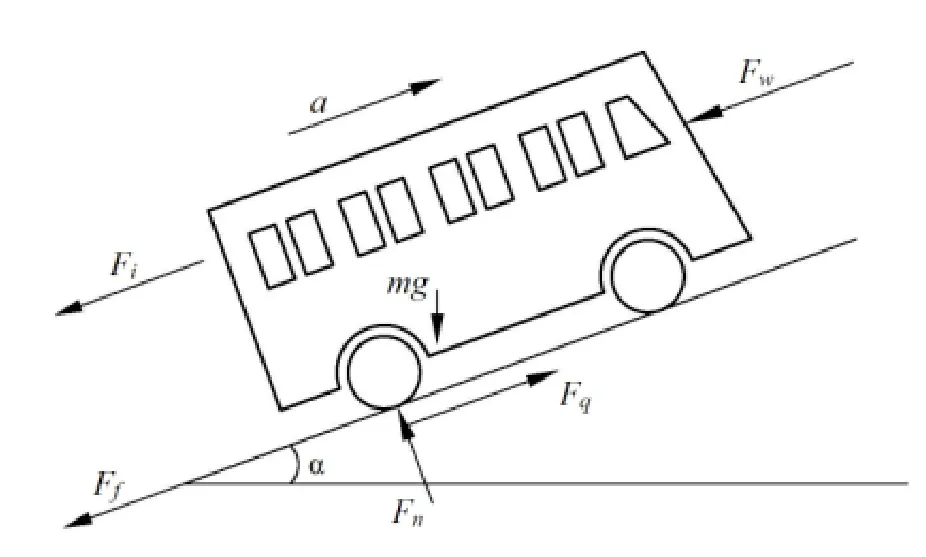
图2 后轮驱动车辆坡道受力分析
根据车辆受力平衡,有:

其中:

式中:α为坡度角,φ为附着系数,b为汽车质心到前轴的距离,l为汽车轴距,hg为汽车质心高度,CD为空气阻力系数,A为汽车迎风面积,f1、f2为前后轮滚动阻力系数,σ为空气密度。
经过计算和化简,分别得出驱动和制动两种情况下后轮达到附着极限时车辆的末速度:

为了使车辆在极限附着情况下,需求牵引力不能超过车轮能提供的最大牵引力,后驱车辆的仿真车速不会超过车辆的实际运行能力[8],依据上述动力学方程,对ADVISOR中的轮胎极限车速、整车驱动力和制动力加以限制,将前驱模块进行修改、替换,重新封装,最终建立牵引力控制系统模型和后驱整车模型。

图3 牵引力控制模块

图4 后驱整车模型
1.3 混合动力系统控制策略模型设计
ADVISOR中的部分模型是以经验数据为基础建立的稳态模型,仿真效果不佳;并且本文研究的仿真车辆的控制策略与ADVISOR中现有的控制策略不同。因此,在此需要对控制策略进行重新设计。由于车辆本身是一个非线性系统,若采用传统的PID控制,需要将非线性系统进行线性化,控制器的设计很费时间。故文中并联式混合动力车辆采用的是模糊逻辑控制,主要利用车辆的踏板开度、车速和SOC之间的关系作为动力分配的主要依据,经过模糊逻辑动力分配控制器模组,使发动机和马达的动力保持最佳分配。图4是模糊动力控制器的基本结构。

图5 模糊动力控制器基本结构
混合动力系统控制策略的控制算法示意图如图6所示。混合动力系统的总功率需求依据驾驶员对加速踏板或制动踏板的指令而求得;控制器根据功率的需求,决定混合动力系统的能量流;再依据车速、负载和蓄电池组的荷电状态,由SOC来决定发动机和电机的运行状态。由此,在ADVISOR中对控制策略作如下定义,并修改
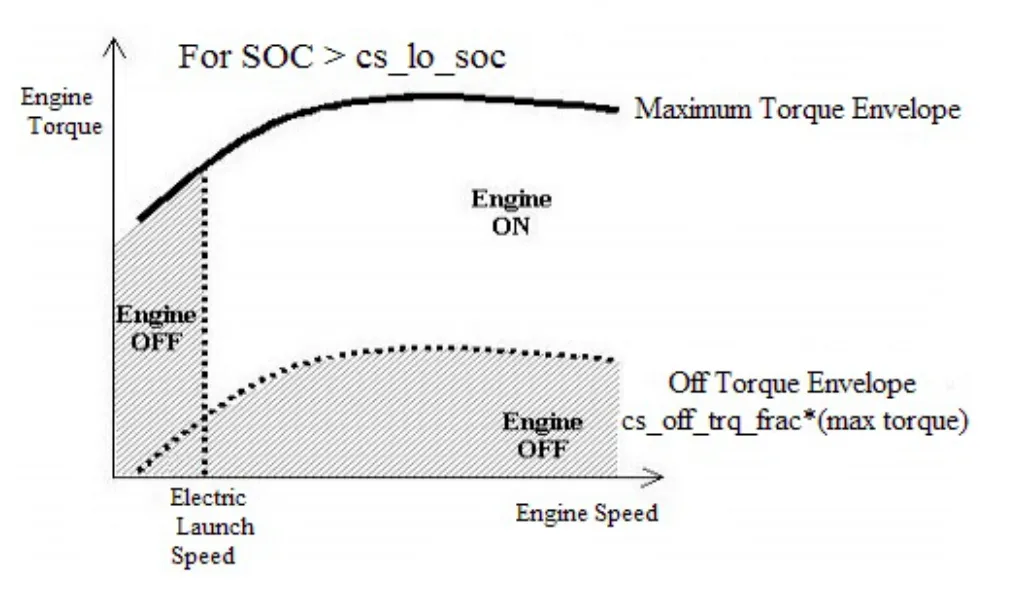
图6 控制策略示意图
2 仿真与结果分析

图7 发动机开关控制模块
在进行ADVISOR仿真分析时,选择不同的道路循环工况会较大的影响仿真结果。为了让仿真分析更趋近实际情况,本文将中国城市公交典型工况导入ADVISOR,并选用该工况对混合动力系统进行经济性能仿真分析。图7是中国城市公交典型工况图。由于该工况下的仿真车速上限是60km/h,因此在进行混合动力系统最高车速仿真时,又选择了美国环境保护署城市道路循环工况CYCUDDS进行车速仿真。

图8 中国城市公交典型工况
对道路循环工况进行合理的选择,利用文中所建立的后驱混合动力系统和控制器模型,分别针对中国城市公交典型工况和CYC-UDDS城市道路循环工况,对车辆进行了燃油经济性和动力性能的快速仿真。混合动力原型车辆基本参数如表1所示,表2和表3分别是燃油经济性和动力性能的仿真结果。由于中国城市公交工况的车速大部分为低速,平均速度仅16.1km/h,且车速变化频繁,在这种工况下混合动力汽车的燃油经济性提高较为明显。

表1 原型车基本参数

表2 燃油经济性仿真结果

表3 动力性能仿真结果
图9是混合动力汽车在CYC-UDDS城市道路循环工况的速度仿真结果曲线图,从曲线可读出最高仿真车速为90.5km/h,另外加速性能和爬坡性能的仿真结果也都达到了设计目标。在ADVISOR的仿真结果输出界面中,通过output check plots(输出检验图)可以获取各动力部件的工况图。图9、图10分别是动力传动系统的仿真效率和混合动力客车电机的仿真效率图,从输出工况图可以看出,仿真过程中电机的工作效率点大部分是在0.8以上,这种结果是较为理想的。

图9 混合动力客车速度仿真曲线

图9 电机仿真效率

图10 动力传动系统仿真效率
3 结论
1)本文充分利用了ADVISOR软件代码开放的特性,在其现有仿真模型的基础上,进行二次开发建立了混合动力客车的后驱动力系统模型和控制模型,并将中国城市公交典型工况导入ADVISOR,这使仿真研究与实际工况更加吻合。
2)仿真结果表明,所建立的动力系统和控制策略能够较好的仿真该混合动力汽车的动力性能和燃油经济性,且与原车型相比,混合动力汽车的燃油经济性提高较明显,动力性能也能达到设计要求。这为混合动力汽车的实用化、产量化提供了技术支持,减少了产品的开发周期和成本。
[1]环境保护部.2013年中国机动车污染防治年报[EB/OL].http://www.mep.gov.cn/gkml/hbb/qt/201401/t20140126_266973.htm, 2014-01-26.
[2]徐宝云,王文瑞.计算机建模与仿真技术[M].北京:北京理工大学出版社,2009:1-15.
[3]张翔,钱立军,等.电动汽车仿真软件进展[J].系统仿真学报,2004,16(8):1621-1623.
[4]National Renewable Energy Laboratory.ADVISOR2002 Help Document [G].http://www.ctts nrel gov/analysis, 2002.
[5]曾小华,王庆年,等.正向仿真模型与反向软件ADVISOR的集成开发[J].汽车工程,2007,29(10):851-854.
[6]Markel T, Brooker A, Hendricks T, et al.ADVISOR: A systems analysis tool for advanced vehicle modeling [J].Journal of Power Sources, 2002,110(2): 255-266.
[7]余志生.汽车理论[M].北京:机械工业出版社,2006:57-66.
[8]曾小华,宫维钧.ADVISOR2002电动汽车仿真与再开发[M].北京:机械工业出版社,2014:213-233.
