室内微弱信号环境中的五状态粗时段导航算法
2015-07-07刘泽辉黄志勇于广瑞左国军
刘泽辉,黄志勇,王 彤,于广瑞,彭 春,左国军
(1.61175部队,武汉 430074;2.信息工程大学地理空间信息学院,郑州 450052; 3.中国天绘卫星中心,北京 102102;4.61206部队,北京 100086)
室内微弱信号环境中的五状态粗时段导航算法
刘泽辉1,黄志勇2,3,王 彤1,于广瑞4,彭 春4,左国军4
(1.61175部队,武汉 430074;2.信息工程大学地理空间信息学院,郑州 450052; 3.中国天绘卫星中心,北京 102102;4.61206部队,北京 100086)
针对传统接收机在室内等微弱信号环境下无法捕获卫星信号,难以获得定位结果的问题,本文利用A-GNSS接收机在微弱信号环境下捕获的伪码相位值,提出了采用五状态粗时段导航方程进行快速定位的方法。该方法能够应用于浓密森林、城市峡谷、室内等微弱信号领域导航。本文系统总结了粗时段导航技术,推导了其解算流程,并设计仿真实验验证了该算法在微弱信号环境下定位的可行性。结果表明:五状态粗时段导航算法能够提供精度较高的定位结果。
辅助全球卫星导航系统;粗时段导航;室内定位;码相位;微弱信号定位
0 引言
全球卫星导航系统(global navigation satellite system,GNSS)接收机在室外开阔环境时拥有良好的信号环境,然而人们希望在任何地点都能使用GNSS,包括室内等弱信号环境下,于是出现了辅助全球卫星导航系统(assisted-GNSS,A-GNSS)的构想和技术。A-GNSS通过位置服务器和移动基站提供给接收机辅助信息,增强了传统GNSS接收机的使用范围,使得其在强烈衰减的室内环境下仍能获得定位结果。
引导A-GNSS定位技术迈向产业化的标志性事件是1996年美国联邦通信委员会E911(Enhanced 911)法令的颁布[1]。该法令要求移动运营商为手机用户提供紧急求助服务,要求的精度为: (1999年10月版)基于网络的定位提供的精度为100 m(67%)和300 m(95%);基于终端的定位提供的精度为50 m(67%)和150 m(95%)[2]。为了达到E911法令的要求,各种室内外定位技术被广泛应用于个人定位服务之中。目前在城市和室内环境中通常采用的个人定位技术有:蜂窝网定位技术如小区识别码(Cell-ID)、到达时间差(time difference of arrival,TDOA)、增强测量时间差(enhanced observed time difference,E-OTD),无线局域网(wireless local area network,WLAN)定位,超宽带定位(ultra wideband,UWB),惯性导航辅助定位。然而蜂窝网定位技术定位精度较低,很多情况下难以达到E911法案规定的精度要求,其他定位技术大都存在覆盖范围有限或者需要巨额投资的问题。而A-GNSS定位技术保留了传统GNSS定位技术全天候、实时、全球性、高精度的特点,同时增加了辅助信息带来的高灵敏度、快速定位的优势,为用户实现室内外无缝定位提供了基础,因此,A-GNSS定位技术成为了E911定位的首选方案。
然而,当A-GNSS接收机处于室内等极微弱的信号环境时,由于导航电文解调误码率太高, A-GNSS接收机仅能通过跟踪(捕获或精细捕获)过程从码跟踪环路中获得伪码相位值与多普勒频移值,无法进行后面的位同步、帧同步以及解调导航电文。由于接收机仅能测量部分的伪距,只能恢复部分的信号发射时间,而不能得到卫星在发射信号时的具体位置,该问题又被称作“粗时段导航(coarse-time navigation)问题”。
针对粗时段导航问题,文献[3]改进了增强型三角测量法,提出了一种采用Lambda-fraction函数消除卫星信号发射时刻模糊度的方法,但该方法对迭代方程初始值误差有限制,特别是要求用户初始位置误差在150 km内,而且文献[3]没有给出有效的初值选取方法。文献[4]提出了基于未知位置和粗时空间的代价函数最小化的迭代方法,但他们都没有解决如何构造全伪距去解决整数毫秒翻转问题。文献[5]提出了一种构造全伪距法,解决整数毫秒模糊度的问题,但要求先验位置与粗时间的总误差在150 km以内。文献[6]在其基础上,提出了一种基于多普勒定位提供初值的粗时段导航算法。
本文通过研究室内微弱信号的特点,提出了利用粗时段导航技术解决室内定位问题的思路,推导了5-状态粗时段导航方程,指出了算法对初始状态的要求和参考卫星的选择方法,最后通过接收机获得的北斗卫星导航系统(BeiDou navigation satellite system,BDS)数据验证了其可行性。
1 粗时段导航
1.1 5-状态粗时段导航方程
辅助GNSS接收机大多数情况下没有精时间辅助全球移动通信系统(global system for mobile communication,GSM)、通用移动通信系统(universal mobile telecommunications system,UMTS)、宽带码分多址(wideband code division multiple access,WCDMA)时间精度1~2 s,码分多址(code division multiple access,CDMA)时间精度为微秒级)。正常信号情况下,接收机通过解码周内时间(time of week,TOW)的转换字(hand over word, HOW)来获得精时间(fine-time),然而这需要耗费数秒的时间。而且在信号极其微弱的情况下,长时间亦无法解码星历,无法获得HOW。卫星的相对运动引起了粗时段导航的问题,可以计算每颗卫星的相对速度,运用导航方程去求解用户位置Xu(xu,yu,zu)和接收机公共偏差b以及粗时误差tc。即可以求出时间,而不依靠于解码得到它,这样也缩短了首次定位时间,自己估计TOW进行粗时段导航可以带来以下三个方面的优势:
1)更短的首次定位时间;
2)在信号微弱低于解码导航电文所需信号强度门限的情况下获取定位结果;
3)该定位算法仅需完成信号的捕获,耗费时间极短,不需要花费6 s或更长时间来解码TOW。
而完成粗时段导航需要以下先验信息:
1)有效的星历信息(用以计算卫星位置并估计预测伪距);
2)几十千米精度的近似用户位置;
3)数秒精度的周内时;
4)亚毫秒伪距测量值,即码相位值。
对于全球定位系统(global positioning system, GPS)卫星来说,10 ms左右的粗时误差与其最大的伪距速率(800 m/s)的积会产生10 m左右的伪距误差,将带来10 m左右的定位误差。因此10 ms定义为精时间和粗时间的分界点[7]。
与普通的四状态导航方程相比,多了一个粗时误差参数,因此叫做五状态粗时段导航。五状态粗时段导航方程如式(1)所示。式(1)中,ρ(k)表示实测的伪距值,^ρ(k)表示预测的伪距值,δρ(k)表示伪距残差,对于每颗卫星,δρ(k)和五个先验参数的更新值δx=(δxyz,δb,δtc)之间的关系为
然而,实测的伪距值ρ(k)并未得到,只能由捕获过程测得伪码相位值(code phase),即亚毫秒伪距(fractional pseudoranges),因此如何利用伪码相位值获得全伪距值是解决粗时段导航问题的关键。文献[5]根据给定的先验位置和粗时间,提出了一种避免产生整数毫秒模糊度的重构全伪距法,该算法流程为:

图1 伪距重构算法流程图
1)选择一颗卫星作为参考卫星(最好选择高度角较高的卫星),指定该卫星的整数毫秒模糊度为,测得的伪码相位值为z(1),这样得到第一颗卫星的测量伪距为

3)将式(6)减去式(5),消去相同的公共误差,
1.2 初始状态和参考卫星的选择
由于需要由部分伪距重构全部的伪距,因此对初始状态(位置和时间)与参考卫星的选择有一定要求,如果初始位置和时间误差过大,可能出现预测的个别或全部卫星的伪距与真实伪距值相差整数毫秒值的情况。
参考卫星的最佳选择是高度角最高的卫星,其理由如下所述。
在推导伪距重构算法时,式(8)表明先验位置和时间误差不超过150 km时,不会出现整数毫秒偏转的情况。在辅助北斗卫星导航系统(assisted-BDS,A-BDS)中,接收机先验位置一般由蜂窝网无线电定位技术(如Cell-ID)获得,先验位置误差优于几千米,先验时间误差精度优于2 s,故能满足上述要求。然而当接收机处于特殊情况下,如网络为漫游状态或设备与网络间或连接时,获得的先验位置和时间误差较大,可能超过150 km时。要想确保满足要求,最保守的估计为

此时我们希望尽量放宽该算法的适用条件,通过合理的选择参考卫星与控制参与解算的卫星高度角可以有效的解决该问题,使得单颗卫星先验位置和时间误差远大于75 km时,该算法依然成立。

2 粗时段导航室内定位仿真验证
在室内等微弱信号环境中,卫星信号极其微弱,接收机仅能获得伪码相位值,因此粗时段导航算法适用于该环境。而室内信号面临着强烈的信号衰减、多路径效应和非视距传播(non line of sight,NLOS)信号和互相关效应的影响,获得的伪距值或伪码相位值可能含有较大的误差,此时可以结合接收机完好性监测技术[8](receiver autonomous integrity monitoring,RAIM)来检查并剔除含有较大误差的观测值。本文在仿真验证时不考虑强烈的多路径、非视距传播和信号中断等特殊情况带来的影响。
选取在上海地区采用和芯星通公司生产的UB240-COR SBDS/GPS双系统四频接收机(GPS: L1、L2;BDS:B1、B2)获取的采样间隔为30 s 的2 652个历元的GNSS数据,选取其中的BDS数据进行粗时段导航算法的仿真验证实验。
粗时段导航算法中无法获取完整的伪距观测值,而实验获得的数据为完整伪距值,因此利用对伪距取模1 ms值来获得码相位值(不考虑NH码的影响)。为了使算法在粗时段导航模式下进行,忽略了卫星信号发射时间[9],并且取粗时误差分别为1 s、5 s、20 s,来验证不同粗时误差对定位精度的影响。首先对四状态伪距导航(4-state navigation)和五状态粗时段导航(5-state coarse time navigation)的水平精度因子HDOP进行对比,结果如图2。
由图2可知,五状态粗时导航水平精度因子总是大于四状态伪距导航水平精度因子。而某些情况下,它们的差别近似为0,并且五状态粗时段导航的HDOP值全部在3以内,表明能够为用户提供较为可靠的定位结果。
取不同的粗时误差分别为1 s、5 s、20 s,得到粗时误差为1 s时,东、北、天三个方向的误差序列图,并且统计得到不同粗时误差下的五状态导航RMS与四状态导航RMS统计表如图3。
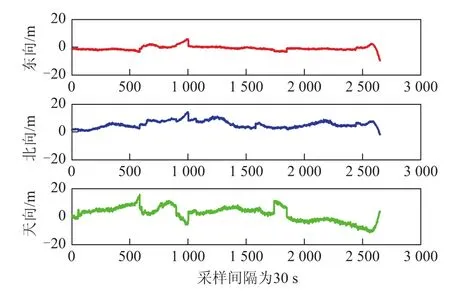
图2 4-状态伪距导航和5-状态粗时段导航HDOP对比

图3 5-状态粗时段导航东、北、天三个方向的误差序列图
由图3可知,在粗时误差为1s时,五状态粗时段导航提供的定位精度水平方向上在15m以内,高程方向在20 m以内,表明五状态粗时段导航能够提供精度较高的定位结果。不同粗时误差下的5-状态粗时段导航与4-状态伪距导航的均方根值(root mean square,RMS)对比见表1。
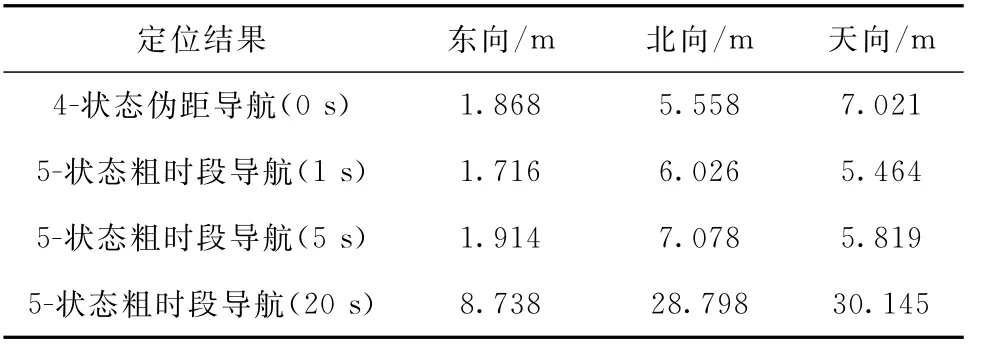
表1 不同粗时误差下的5-状态粗时段导航与4-状态伪距导航RMS对比
由表1可知,粗时段导航提供的定位结果水平方向RMS在6 m左右,接近于四状态伪距导航,并且在粗时误差为20 s时仍能获得定位结果,水平方向RMS在30 m以内。表明在不含有较大伪距误差时,粗时段导航算法精度接近于传统四状态伪距导航。
3 结束语
本文针对GNSS接收机在室内环境中面临的问题,提出了利用A-GNSS粗时段导航技术实现室内等微弱信号环境下的定位的思路,并利用仿真数据验证了该算法的可靠性。实验表明粗时段导航精度接近于传统4-状态伪距导航,且具有连续可用性,能够运用于微弱信号环境;而5-状态粗时段导航在粗时误差为1 s时,定位结果水平方向RMS在10 m以内;在粗时误差达到20 s时仍能提供较好的定位结果。然而室内获得的卫星信号由于受到含有较大的误差,此时可以结合RAIM算法来检测并剔除含有较大的误差的观测值。在未来将具有更多的GNSS卫星和更好的卫星信号设计,届时,利用A-GNSS粗时段导航算法解决室内定位问题将具有极大的可行性。
[1] 宋成.辅助型GPS定位系统关键技术研究[D].长沙:国防科学技术大学,2009.
[2] LACHAPELLE G.GNSS indoor location technologies[J].Journal of Global Positioning Systems,2004,3(1/2):2-11.
[3] SIROLA N.A method for GPS positioning without current navigation data[D].Tampere:Tampere University of Technology,2001.
[4] SIROLA N,SYRJÄRINNE J.GPS position can be computed without the navigation data[EB/OL].[2015-04-15].http:// math.tut.fi/posgroup/sirola_syrjarinne_ion2002a.pdf.
[5] VAN DIGGELEN F.A-GPS:assisted GPS,GNSS,and SBAS[M].Norwood,MA:Artech House,2009.
[6] 黄志勇,赵冬青,田翌君,等.多普勒与伪码相位值结合的A-GPS快速定位算法研究[J].测绘工程.2015,24(3):31-35.
[7] 孟维晓,马永奎,高玉龙.辅助GPS原理与应用[M].北京:电子工业出版社,2013.
[8] GHINAMO G,BOIERO G,LOVISOLO P,et al.Hybrid fault detection technique in assisted GNSS[C]//The Institute of Electrical and Electronics Engineers(IEEE).Preceddings of Position Location and Navigation Symposium(PLANS), 2010 IEEE/ION.Indian Wells:IEEE,2010:765-770.
[9] PETOVELLO M G,CURRAN J T.Investigation of Doppler measurements for static indoor positioning[EB/OL].[2014-08-15].http://www.researchgate.net/publication/261175009_Investigation_of_Doppler_Measurements_for_Static_Indoor_Positioning .
The 5-state Coarse-time Navigation Algorithm in Indoor Weak Signal Environment
LIU Zehui1,HUANG Zhiyong2,3,WANG Tong1,YU Guangrui4,PENGChun4,ZUO Guojun4
(1.Troops 61175,Wuhan 430074,China; 2.School of Mapping and Surveying,Information Engineering University,Zhengzhou 450052,China; 3.China Aerospace Surveying&Mapping Center,Beijing 102102,China; 4.Troops 61206,Beijing 100086,China)
In response to address the issue that the traditional weak signal receiver cannot acquire satellite signals in indoor environments,which make it difficult for users to obtain positioning results;with the Coarse-Time Navigation technology based on assisted-GNSS using the Code phase values acquired in weak signal environments and adopts,the five states Coarse-Time Navigation equation for fast positioning is proposed.It can be used in dense forests,urban canyons and indoor weak signal areas navigation.This paper systematically summarizes the Coarse-Time Navigation technology,and its calculation process is deduced.It designs simulation experiments to show the feasibility of the algorithm in the indoor environment positioning.The results demonstrates that the five states Coarse-Time Navigation can provide a high accuracy Positioning result.
assisted global navigation satellite system;coarse-time navigation;indoor positioning;code phase;weak signal positioning
P228
A
2095-4999(2015)-04-0069-05
2014-10-16
中国航天科技集团公司卫星应用研究院创新基金(2014_CXJJ-DH_14)。
刘泽辉,男(1989—),湖北随州人,助理工程师,主要从事GNSS数据处理理论与方法研究。
刘泽辉,黄志勇,王彤,等.室内微弱信号环境中的五状态粗时段导航算法[J].导航定位学报,2015,3(4):69-73.LIU Zehui,HUANG Zhiyong,WANG Tong,et al.The 5-state Coarse-time Navigation Algorithm in Indoor Weak Signal Environment[J].Journal of Navigation and Positioning,2015,3(4):69-73.
10.16547/j.cnki.10-1096.20150413
