多站无源雷达多起伏目标检测前跟踪算法
2015-07-05胡子军张林让房嘉奇
胡子军张林让 房嘉奇
(西安电子科技大学雷达信号处理国家重点实验室 西安 710071)
多站无源雷达多起伏目标检测前跟踪算法
胡子军*张林让 房嘉奇
(西安电子科技大学雷达信号处理国家重点实验室 西安 710071)
针对多站无源雷达背景下多起伏目标同时检测和跟踪的问题,该文提出一种基于多目标多伯努利(MeMBer)滤波器的多起伏目标检测前跟踪(TBD)算法。由于起伏目标的平均信噪比(SNR)未知使得目标的回波幅度似然函数不确定,该文假定包络检波器的输出平均SNR服从先验的均匀分布,并对可能取值区间进行边缘化处理,得到一个估计的似然函数,基于该估计的似然函数,融合中心利用所有收发对的幅度观测信息对MeMBer滤波器的各个预测分量进行更新。仿真结果表明,该算法能够有效地同时检测和跟踪多起伏目标,并且在平均SNR大于9 dB时,其性能与平均SNR已知情况下的性能近似。
多站无源雷达;检测前跟踪;起伏目标;多目标多伯努利滤波器
1 引言
多站无源雷达由于具有低成本、抗干扰、抗电子支援措施(Electronic Support Measures, ESM)的优势,近年来重新受到广泛关注[1-4]。多站无源雷达系统由多个收发对组成,有多发单收(利用广播、电视等发射源)和单发多收两种实现方式,后者尽管成本相对高些,但是通过合理部署各个接收机与发射机的相对位置,能够获得更好的观测效果[1]。传统的多站雷达跟踪系统采用数据级融合方法:各个收发对以各自的检测门限独立地检测目标,并将检测结果和观测数据(双站距离和、双站多普勒速度和)传输到融合中心进行数据处理。由于目标的雷达截面积(Radar Cross Section, RCS)随视角变化而起伏,使得目标在某些收发对下的回波幅值不能超过检测门限,导致该收发对潜在的目标信息丢失。对于隐身飞机等弱小目标,该问题更加严重。
检测前跟踪(Track-Before-Detect, TBD)算法是跟踪弱小目标的有效方法,它直接对未阈值化的回波数据进行处理,同时检测和跟踪目标。典型的TBD算法主要有两类,一类是Hough变换[5]、最大似然[6]和动态规划[7,8]等批处理方法,该类方法需要对目标状态进行离散化,且需要等待多帧观测数据才能处理。另一类是以粒子滤波为代表的贝叶斯方法[9,10],贝叶斯TBD方法不需要离散化状态空间,它有效利用前一时刻的先验信息迭代处理各时刻数据。近年来,相关学者利用随机有限集方法实现多目标贝叶斯TBD算法。文献[11]基于多目标多伯努利(Multi-target Multi-Bernoulli, MeMBer)滤波器提出了一种针对图像回波数据的多目标TBD算法(MeMBer-TBD),在观测数据可分离的前提下,利用回波似然比函数更新目标的状态。文献[12]基于概率假设密度(Probability Hypothesis Density, PHD)滤波器实现MIMO雷达下多目标检测前跟踪,但是PHD滤波器假定杂波强度函数服从泊松分布,而雷达的包络检波器输出的噪声幅度服从瑞利分布,这种不匹配限制了基于PHD的TBD算法的性能。此外在多站雷达背景下,由于目标相对收发站的视角变化导致目标的RCS变化,使得目标回波的幅度信息是起伏的(典型的雷达起伏模型包括施威林Ⅰ,Ⅱ,Ⅲ,Ⅳ型)[13],通常情况下起伏目标的平均信噪比(Signal -to-Noise Ratio, SNR)未知,进而导致回波幅度的似然比函数未知,这使得基于先验回波幅值统计特性的已有算法失效。
本文基于文献[11]的MeMBer-TBD算法,采用信号级融合方法,同时检测和跟踪多站无源雷达背景下的多个慢起伏瑞利分布(施威林Ⅰ型)的目标。针对起伏目标的平均SNR未知使得目标的回波幅度似然函数不确定的问题,本文假定包络检波器的输出平均SNR服从先验的均匀分布,边缘化处理其可能的取值区间,得到一个估计的似然函数,基于该估计的似然函数,融合中心利用所有收发对的幅度观测信息对MeMBer滤波器的各个预测分量进行更新。仿真结果表明,本文算法能够同时检测和跟踪多起伏目标,并且在平均SNR大于9 dB时,其性能与平均SNR已知情况下的性能近似。
2 系统模型
2.1 目标运动模型


其中F为状态转移矩阵,1k-v为零均值的高斯白噪声,其协方差矩阵为1k-Q。
2.2 多站无源雷达观测模型
本文采用单发多收的多站无源雷达系统,发射机位于后方,L个接收机位于监视区域附近,形成L个双站雷达组网系统。各个双站雷达对回波数据进行匹配滤波、脉间相参积累和包络检波,并将所有单元的幅值数据送到融合中心处理。目标起伏模型采用适用于飞行器的施威林Ⅰ型,即目标幅值服从慢起伏的瑞利分布。为便于定量分析本文算法在不同平均SNR下的跟踪性能,假定所有目标在各收发对下的平均SNR相同,各目标的起伏特性相互独立,各自在对应的距离、速度2维单元上独立产生信号幅度数据。以M,N分别表征双站雷达的距离单元和速度单元个数,k时刻第l个双站雷达的观测矢量为


其中σ为包络检波器的正交通道上的噪声标准差。如果该距离单元存在目标,且目标的平均SNR为b,其分布服从[14,15]

为简化计算,贝叶斯估计中通常用似然比替代似然函数。对于第l个双站雷达,如果距离、速度2维单元(,)mn上没有目标,其似然比为1;如果存在目标,其似然比为(假定1σ=)

由于各个2维单元上的信号相互独立,k时刻第l个双站雷达的似然比为

其中D(Xk)表征多目标状态有限集Xk对应的2维单元集合。另外各个双站雷达的包络检波输出的幅度数据相互独立,以zk表征k时刻所有收发对的信号幅度,即

其对应的联合似然比为

本文仅考虑目标在距离和速度2维单元上可分离的情况,即假定不同目标位于不同的2维单元上。这样多站无源雷达的联合似然比函数可表征为

其中qzk(x)表征状态为x的目标对应的多站无源雷达联合似然比函数,即

其中乘积因子ql(|x)对应式(7),只不过此时有效单元集合为状态x在第l个收发对下的距离、速度2维单元。
2.3 基于MeMBer的TBD算法
MeMBer滤波器用多伯努利分布近似多目标概率密度函数,通过迭代各时刻各伯努利分量的参数来实现多目标贝叶斯估计[16,17]。文献[11]针对原始2维图像观测数据,提出一种基于MeMBer滤波器的多目标TBD算法(MeMBer-TBD),在多目标似然函数可分离的前提下(多目标似然比可表征为单目标似然比的乘积),其预测和更新步骤可总结为
预测:设1k-时刻后验多目标状态服从多伯努利分布,且其PDF可表征为其中表征第i个伯努利分量的存在概率,为其分布函数。则其预测的多目标状态仍服从多伯努利分布,且可表征为

更新:设k时刻预测的多目标状态服从多伯努利分布,且其PDF可表征为k时刻的原始观测图像数据矢量为kz,则其后验分布仍是多伯努利分布,且可表征为

其中qzk表征单目标状态对应的似然比函数。
3 本文方法
雷达背景中,当飞行器类型的目标起伏时,其对应的回波包络的平均SNR是未知的,实际操作中,需要根据大量的回波数据离线估计目标的平均SNR。本节利用平均SNR服从均匀分布的先验条件,估计目标的似然函数,并利用该估计的似然函数,基于MeMBer滤波器,实现平均SNR未知情况下的多站无源雷达多起伏目标TBD算法。
3.1 平均SNR未知情况下的似然函数估计
尽管目标的平均SNR未知,但是可以合理假定包络检波器输出的平均SNR取值区间是已知的。由于没有任何先验信息,我们用均匀分布表征包络检波器输出的平均SNR的先验统计特性。另外平均SNR既可用单位“1”度量,又可用“dB”度量,考虑到瑞利分布随着平均SNR的增大,不同平均SNR对应的PDF曲线越来越接近(式(5)),我们假定包络检波器输出的平均SNR在“dB”单位上服从均匀分布,即ζ~u(ζ),ζ∈[dB1,dB2],这实际上等效假定平均SNR大的取值概率会大些。其与单位“1”的平均SNR的转换关系为
其中Φ(b)=10lg(1+b)表征将“1”单位的目标平均SNR(即b)转化到“dB”单位的包络检波器输出的平均SNR的函数,因此Φ′(b)∝p(b)=1/(1+b)。假定目标在某个单元上的幅度为z(为便于分析,在参数不混淆的前提下去掉角标),其对应的似然函数可表征为
对应的似然比函数为
采用信息论里的Kullback-Leibler散度评估该估计似然函数与真实似然函数的相似度,其定义为[15]

假定目标的平均SNR的有效取值区间为[5 dB, 15 dB],运用序列蒙特卡洛积分估计方法计算该积
分:对于给定的b,基于g1(z|b)采样1×105个粒子,对应的散度值为得到的结果如表1所示,可以看出有效范围内的平均SNR对应的幅度似然函数与估计似然函数间的Kullback-Leibler散度值都小于1,这说明本文估计的似然函数能够较准确地表征真实回波幅度的统计特性。
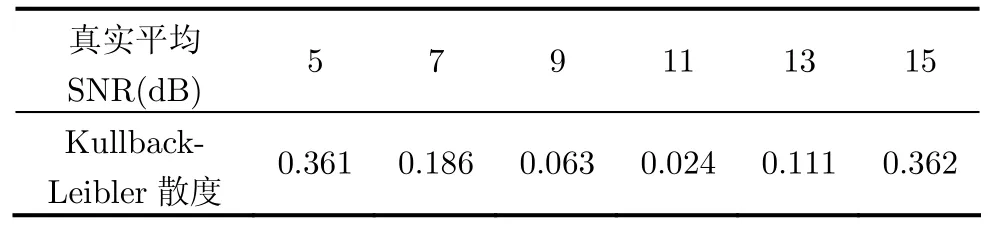
表1 不同平均SNR下的似然函数与估计似然函数的Kullback-Leibler散度
3.2 MeMBer-TBD的粒子滤波实现
对于平均SNR未知的多个慢起伏瑞利分布的目标,基于MeMBer滤波器,利用估计的似然函数,可以实现对其同时检测和跟踪。由于目标似然函数的非线性比较严重,采用粒子滤波的实现方式。幸存目标和新生目标的重要采样函数分别采用单目标状态转移函数fk|k-1(⋅| ⋅)和新生目标的先验函数pΓ,k(⋅),假定目标存活概率pS,k独立于目标状态。基本流程如下:
预测:设1k-时刻后验多目标状态服从多伯努利分布,且其PDF可表征为其中表征第i个伯努利分量的存在概率,第i个伯努利分量的PDF由粒子集近似,即其中δ(⋅)表征冲激函数。则其预测多目标状态的PDF为πk|k-1=,其中=为新生目标的存在概率,

则更新的多伯努利多目标状态PDF可由式(19),式(20)计算


伯努利分量和粒子数管理:由于总的伯努利分量数随着各时刻预测时新生目标的出现而增加,为保证计算有效性,各时刻存在概率小于给定门限pT的伯努利分量被丢弃,表征多目标PDF的伯努利分量个数最大为maxN,若超过则取前maxN个最大存在概率对应的伯努利分量。表征各个伯努利分量的分布函数的粒子数正比于该伯努利分量的存在概率:预测时,采样个粒子表征第i个新生目标的分布函数,重采样时,采样=个粒子表征第i个伯努利分量的分布函数,其中maxL,minL分别为单个目标的最大可能和最小可能粒子数。
状态提取:后验多目标状态有限集的势均值为期望目标数估计,存在概率0.5>的伯努利分量为有效目标,其后验状态一阶矩为对应的目标状态估计。即0.5。
值得注意的是,尽管本文针对的是多站无源雷达背景下的多起伏目标的TBD,但是对于单站雷达或者多站主动雷达背景,如果多起伏目标始终保持在同一波束,本文算法仍然适用。
4 仿真实验与分析
本节验证本文算法的有效性,评估参数采用期望目标数估计和优化子模式分配(Optimal SubPattern Assignment, OSPA)距离,OSPA距离计算公式为[18]

多站无源雷达系统布局如图1所示:单个发射站部署在后方,坐标为(-30,0) km, 3个接收站并排靠近监视区域,位置分别为(0,15) km, (0,0)和(0,-15) km,分别与接收站组成3个收发对。表征

图1 多站无源雷达空间分布
式中阶数1p=,势误差参数500c=。目标运动模型的状态转移矩阵和噪声协方差矩阵分别为

其中时间步长T=0.5 s,运动噪声标准差q=5。目标1在时刻1以速度(-350,-100) m/s起始于位置(30,12) km;目标2在时刻8以速度(-300,50) m/s 起始于位置(32,5) km,目标起始后一直存在。
目标存活概率pS,k=0.99,表征新生目标的伯努利元件集合为其中rΓ=0.1,[32 km,-300 m/s,5 km,50 m/s]T,PΓ=diag([ 502, 52, 502, 52])。双站径向距离和、多普勒速度和的有效观测区间为[70, 110] km×[400, 800] m/s,径向距离和、多普勒速度和分辨单元分别为250 m, 20 m/s。丢弃概率门限Tp=5×10-3,最大有效伯努利分量Nmax=10,单目标最大、最小粒子数分别为Lmax=3000, Lmin=1000。给定噪声标准差为1,设置目标真实平均SNR为9 dB(就TBD算法而言,该信息未知),单次仿真,3个收发对在第8时刻的包络检波器的输出(单位V)数据如图2所示,该时刻目标1在3个收发对下的速度、距离单元号分别为(16,76), (17,84)和(15,117),目标2在3个收发对下的速度、距离单元号分别为(10,103), (10,99)和(7, 120),可见两个目标完全淹没在噪声中。基于本文算法的位置估计结果如图3所示,可以看到x-和y-维的估计值基本上覆盖在真实位置上,这说明本文算法能够有效跟踪多个弱小起伏目标。
在平均SNR为9 dB的条件下,保持航迹数据不变,蒙特卡洛(MC)仿真1000次,每次仿真时观测数据独立产生,得到的期望目标数估计的MC均值如图4所示,由该图可知,平均SNR未知情况下的期望目标数估计基本上和平均SNR已知下的结果一致,在稳定跟踪时间段两者的误差都在0.1的数量级上,这说明本文算法能够较准确地估计各时刻目标的个数。各时刻OSPA距离的MC均值如图5所示,可以看出,平均SNR未知情况下的OSPA距离接近于平均SNR已知情况的,8k=时刻OSPA曲线的抖动是由于该时刻新生目标的出现导致目标个数变化,滤波器需要时间响应。
为了进一步分析本文算法的性能,以理想的平均SNR已知情况下的性能为标准,仿真不同的平均SNR下的算法性能。各个平均SNR下进行1000次MC实验,得到的目标数偏差随平均SNR变化的曲线如图6所示,OSPA距离随平均SNR变化的曲线如图7所示。由图6可知,在平均SNR为5 dB的情况下,目标个数偏差的MC均值接近1,这说明本文算法在5 dB的情况不能有效跟踪目标,但是当平均SNR大于9 dB时,其性能和平均SNR已知情况下的基本一致,目标个数偏差都在0.2以下。图7同样说明当平均SNR大于9 dB时,本文算法的性能和平均SNR已知的情况基本一致。
5 结束语

图2 第8时刻的3个收发对下的包络检波器的输出(9 dB)
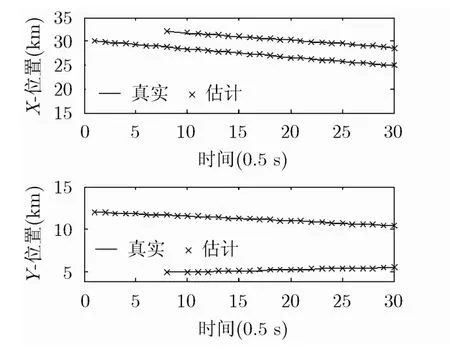
图3 单次仿真的位置估计(9 dB)

图4 期望目标数估计的MC均值(9 dB)

图5 OSPA距离的MC均值(9 dB)
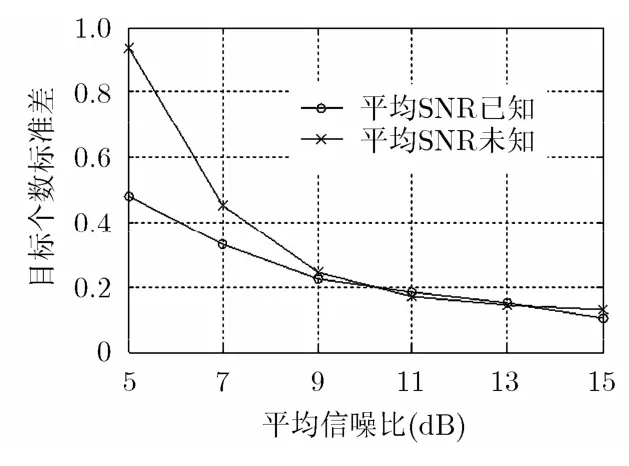
图6 不同平均SNR下的目标数估计偏差
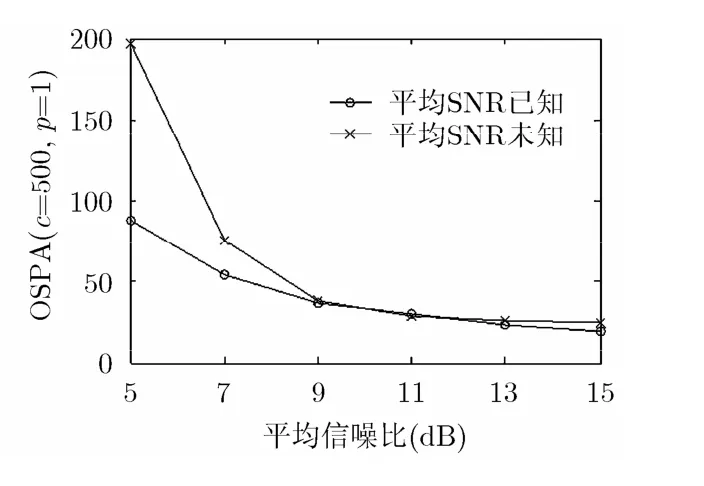
图7 不同平均SNR下的OSPA距离
针对多站无源雷达背景下多起伏目标的同时检测和跟踪问题,提出一种基于MeMBer滤波器的多起伏目标TBD算法。由于起伏目标的平均SNR未知使得幅度似然函数不确定,本文在包络检波器的输出平均SNR服从均匀分布的先验条件下,边缘化处理其可能的取值区间,得到一个估计的似然函数,利用该估计的似然函数,采用MeMBer滤波器实现多起伏目标的TBD。然而本文简单假定所有目标在所有收发对下的平均SNR相同,如何设计合理的多站雷达下起伏目标的平均SNR的统计特性,并基于该统计特性分析本文算法的性能是今后需要开展的工作。
[1] Battistelli G, Chisci L, Morrocchi S, et al.. Robust multisensor multitarget tracker with application to passive multistatic radar tracking[J]. IEEE Transactions on Aerospace and Electronic Systems, 2012, 48(4): 3450-3472.
[2] Gorji A A, Tharmarasa R, and Kirubarajan T. Widely separated MIMO versus multistatic radars for target localization and tracking[J]. IEEE Transactions on Aerospace and Electronic Systems, 2013, 49(4): 2179-2194.
[3] Ristic B and Farina A. Target tracking via multi-static Doppler shifts[J]. IET Radar, Sonar & Navigation, 2013, 7(5): 508-516.
[4] 吴昊, 苏卫民, 顾红, 等. 基于非均匀快速傅氏变换的多站无源雷达成像算法[J]. 南京理工大学学报, 2012, 36(6): 984-988.
Wu Hao, Su Wei-min, Gu Hong, et al.. Passive multistatic radar, imaging algorithm based on non-uniform fast Fourier transform method[J]. Journal of Nanjing University of Science and Technology, 2012, 36(6): 984-988.
[5] Carlson B D, Evans E D, and Wilson S L. Search radar detection and track with the Hough transform. I. system concept[J]. IEEE Transactions on Aerospace and Electronic Systems, 1994, 30(1): 102-108.
[6] Tonissen S M and Bar-Shalom Y. Maximum likelihood trackbefore-detect with fluctuating target amplitude[J]. IEEE Transactions on Aerospace and Electronic Systems, 1998, 34(3): 796-809.
[7] Grossi E, Lops M, and Venturino L. A novel dynamic programming algorithm for track-before-detect in radar systems[J]. IEEE Transactions on Signal Processing, 2013, 61(10): 2608-2619.
[8] 郑岱堃, 王首勇, 杨军, 等. 一种基于二阶Markov目标状态模型的多帧关联动态规划检测前跟踪算法[J]. 电子与信息学报, 2012, 34(4): 885-890.
Zheng Dai-kun, Wang Shou-yong, Yang Jun, et al.. A multi-frame association dynamic programming track-beforedetect algorithm based on second order Markov target state model[J]. Journal of Electronics & Information Technology, 2012, 34(4): 885-890.
[9] Ristic B, Arulampalam S, and Gordon N. Beyond the Kalman Filter: Particle Filters for Tracking Applications[M]. Boston, MA: Artech House, 2004: 239-259.
[10] 夏双志, 戴奉周, 刘宏伟. 复高斯白噪声背景下贝叶斯检测前跟踪的检测阈值设置方法[J]. 电子与信息学报, 2013, 35(3): 524-531.
Xia Shuang-zhi, Dai Feng-zhou, and Liu Hong-wei. A method of determining detection threshold for Bayesian track-beforedetection in white complex Gaussian noise[J]. Journal ofElectronics & Information Technology, 2013, 35(3): 524-531.
[11] Vo B N, Vo B T, Pham N T, et al.. Joint detection and estimation of multiple objects from image observations[J]. IEEE Transactions on Signal Processing, 2010, 58(10): 5129-5141.
[12] Habtemariam B K, Tharmarasa R, and Kirubarajan T. PHD filter based track-before-detect for MIMO radars[J]. Signal Processing, 2012, 92(3): 667-678.
[13] 丁璐飞, 耿福录. 雷达原理[M]. 西安: 西安电子科技大学出版社, 2002: 141-153.
[14] Lerro D and Bar-Shalom Y. Automated tracking with target amplitude information[C]. Proceedings of the American Control Conference, San Diego, CA, 1990: 2875-2880.
[15] Clark D, Ristic B, Vo B N, et al.. Bayesian multi-object filtering with amplitude feature likelihood for unknown object SNR[J]. IEEE Transactions on Signal Processing, 2010, 58(1): 26-37.
[16] Mahler R. Statistical Multisource-Multitarget Information Fusion[M]. Norwood, MA: Artech House, 2007: 655-682.
[17] Vo B T, Vo B N, and Cantoni A. The cardinality balanced multi-target multi-Bernoulli filter and its implementations[J]. IEEE Transactions on Signal Processing, 2009, 57(2): 409-423.
[18] Schuhmacher D, Vo B T, and Vo B N. A consistent metric for performance evaluation of multi-object filters[J]. IEEE Transactions on Signal Processing, 2008, 56(8): 3447-3457.
胡子军: 男,1982年生,博士生,研究方向为多目标跟踪.
张林让: 男,1966年生,教授,博士生导师,研究方向为自适应信号处理、阵列信号处理、非平稳信号处理、雷达系统建模、仿真与评估.
房嘉奇: 男,1984年生,博士生,研究方向为目标定位.
A Track-before-detect Algorithm for Tracking Multiple Fluctuating Targets Using Passive Multistatic Radar
Hu Zi-jun Zhang Lin-rang Fang Jia-qi
(National Laboratory of Radar Signal Processing, Xidian University, Xi’an 710071, China)
A Track-Before-Detect (TBD) algorithm is presented to jointly detect and track multiple fluctuating targets under passive multistatic radar system based on Multi-target Multi-Bernoulli (MeMBer) filter. Because the amplitude likelihood is uncertain due to the unknown mean Signal-to-Noise Ratio (SNR) of fluctuating targets, firstly a uniform prior distribution is assumed for the mean SNR corresponding to the envelope output, and a likelihood function is marginalized over the range of possible values. Based on this approximated likelihood function, the fusion centre uses all the amplitude measurements from each receiver transmitter pair to update the predicted Bernoulli components. Simulations show that the proposed algorithm can jointly detect and track multiple fluctuating targets effectively, furthermore, the performance is similar to the situation of the known mean SNR when the value of the mean SNR is higher than 9 dB.
Passive multistatic radar; Track-Before-Detect (TBD); Fluctuating targets; Multi-target Multi-Bernoulli (MeMBer) filter
TN958.97
A
1009-5896(2015)03-0651-07
10.11999/JEIT140466
2014-04-09收到,2014-08-19改回
国家自然科学基金(61301281)资助课题
*通信作者:胡子军 huzijun007@126.com
