CRH2型动车组制动系统防滑控制的优化
2015-07-05顾小山
顾小山
(上海铁路局 上海动车段,上海 200071)
方法与应用
CRH2型动车组制动系统防滑控制的优化
顾小山
(上海铁路局 上海动车段,上海 200071)
高速列车一般采用空气制动联合再生制动方式进行制动调速或停车,空气制动和再生制动均为粘着制动,受轮轨间粘着系数的影响。随着速度的提高,轮轨间的粘着系数呈降低态势,动车组出现滑行的概率增大,因此动车组的防滑控制也越显重要。本文通过对CRH2型动车组运用问题的梳理及原因分析,提出相对应的防滑控制优化方案,能有效地减少防滑系统故障。
CRH2型动车组;制动系统;防滑控制
高速列车一般采用空气制动联合再生制动方式进行制动调速或停车,这两种方式均为粘着制动,受轮轨间粘着系数的影响,而轮轨粘着系数主要受动车组行驶速度、雨、霜、雪等气候条件及轨面和车轮踏面的状态(生锈、粘附油脂或踏面粗糙度等)的影响,会发生较大变化。因此高速行驶的动车组,在制动时发生滑行的概率很高。不能尽早检测到滑行,进行有效地防滑控制,轮对相对于轨道将发生滑行,严重的情况会导致轮对抱死、踏面擦伤,使制动距离增大,影响动车组运行的舒适度。本文对CRH2系列动车组制动系统防滑控制原理进行介绍,结合CRH2型动车组日常运用中遇到的防滑系统故障进行分析,提出防滑控制优化方案。
1 滑行控制原理
1.1 概要及常见概念
CRH2型动车组的制动力由动车制动控制单元(BCU,Brake Control Unit)计算、分配,优先使用牵引变流器(CI,Converter and Inverter)的再生制动,如再生制动力还不够就用空气制动来补充且优先控制拖车的空气制动。
CRH2型动车组防滑控制为单车控制方式,通过检测1~4轴的速度,进行速度差和减速度滑行检测。其中,动车组使用安装在牵引电机非传动端的速度传感器(PG传感器给CI用、SS传感器给BCU用),拖车是利用安装在各车辆轴端的速度发电机所发出的信号。当CI检测到滑行后,采用减小再生制动模式的方法,空气制动采用降低BC压力的方法来进行再粘着的控制,如图1所示。
1.2 电制动的滑行再粘着控制
当CI检测到A点后如表1所示。0.6 s之内限定再生模式信号变降为0 V,再生制动力减弱。C点检测后,2 s之内让原再生模式信号恢复。如图2所示。
1.3 空气制动的滑行再粘着控制
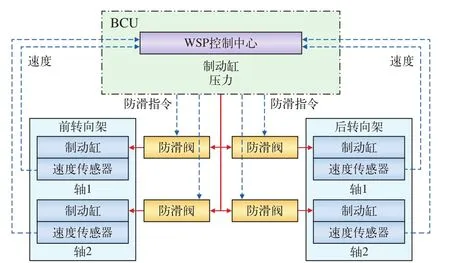
图1 BCU防滑控制原理
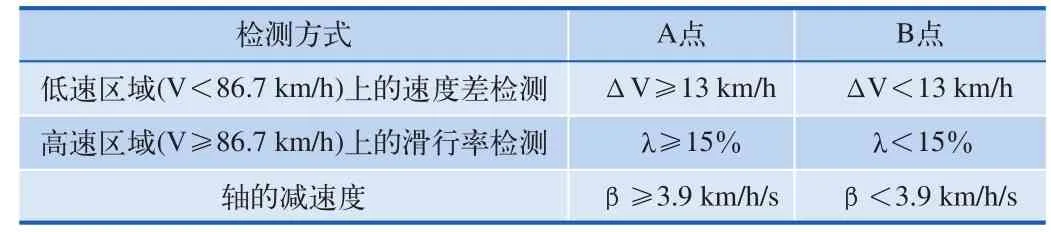
表1 电制动滑行检测条件
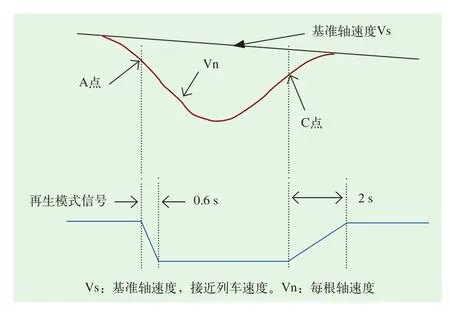
图2 电制动滑行再粘着控制
当BCU件检测到A点条件如表2所示,控制相应轴的防滑阀以阶梯方式排出BC压力。BC压力降低后,该轴的滑行得到控制,接着随其低速度降低,B点条件成立,便停止BC压的排气呈出保持状态,当C点的条件成立时,就重新升高BC压力回复为发生滑行前的正常状态,如图3所示。
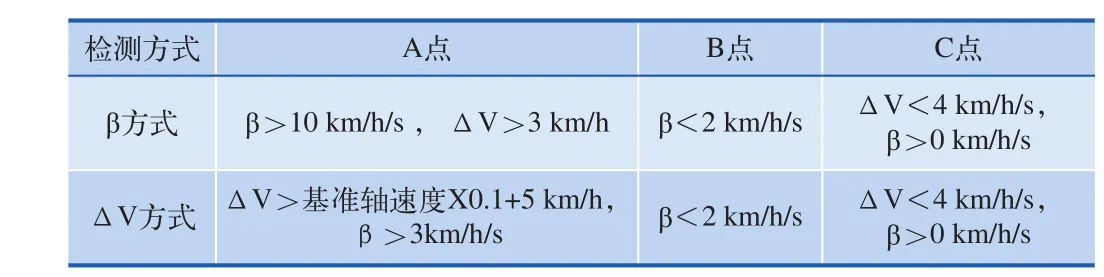
表2 空气制动滑行检测条件
2 常见故障
2.1 防滑阀连接器虚接
防滑阀连接器1、2、4号针脚对应的车辆线号及防滑阀气路的关系如表3和图4所示。

图3 滑行再粘着控制的时序图
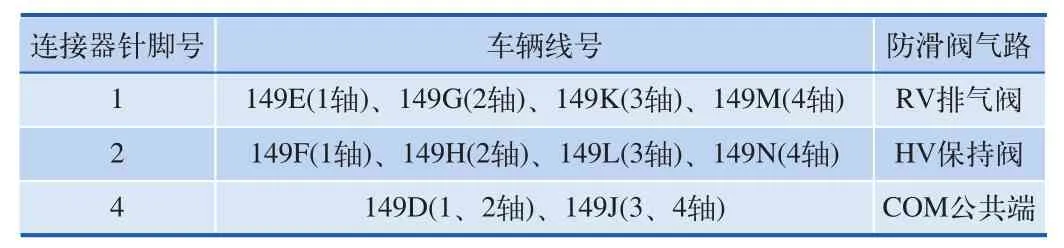
表3 防滑阀连接器针脚、线号等的对应关系
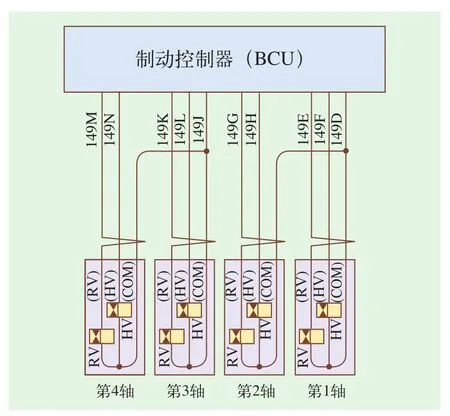
图4 BCU防滑阀连接原理图
当1或4号针接触不良时, BCU无法对防滑阀RV排气阀、HV保持阀进行控制,BC压力无法降低,车轮滑行状态无法及时得到抑制,从而致使轮对持续滑行擦伤。
从故障分析可知,当防滑控制回路发生虚接的情况,BCU无法及时监测到防滑阀连接状态。
2.2 低级别制动时全轴滑行无法检测
2014年12月16日CRH2A-2008动车组运行途中随车机械师发现06车与07车之间车底有异音,检查发现06、07车轮对踏面发生不同程度的擦伤,6车擦伤较为严重。对全车BCU数据下载发现故障发生时,全车所有轴均发生不同程度的滑行。并对故障发生时全车基准轴速度数据进行对比,如图5所示。
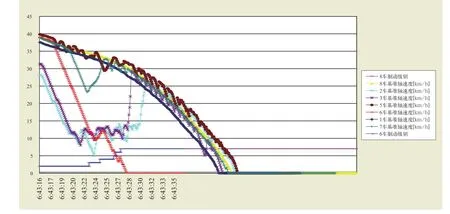
图5 各车基准轴速度数据
01车和08车的第2、3轴由于是ATC轴(Automatic Train Control, 列控系统速度采集基准轴),BCU在制动过程中只要检测出ATC轴滑行,都对此两轴采取全排气的控制,因此01车和08车的基准轴速度比较准确,可以认为接近了列车速度。从图5可以看出, 02、03、06、07车的基准轴速度均发生不同程度偏移,其中06车最大,故擦伤严重。故障原因为当全轴发生滑行后,所有轴速度低于列车速度,且BCU模拟轴选取的减速度β大于小级别制动时的减速(如图6 所示CRH2型动车组仅考虑快速、紧急、常用制动的模拟减速度,未考虑低级别制动),计算出来的模拟轴速度实际低于列车速度,故选取的基准轴速度发生偏移,无法有效地进行滑行再粘着控制,造成轮对踏面擦伤。
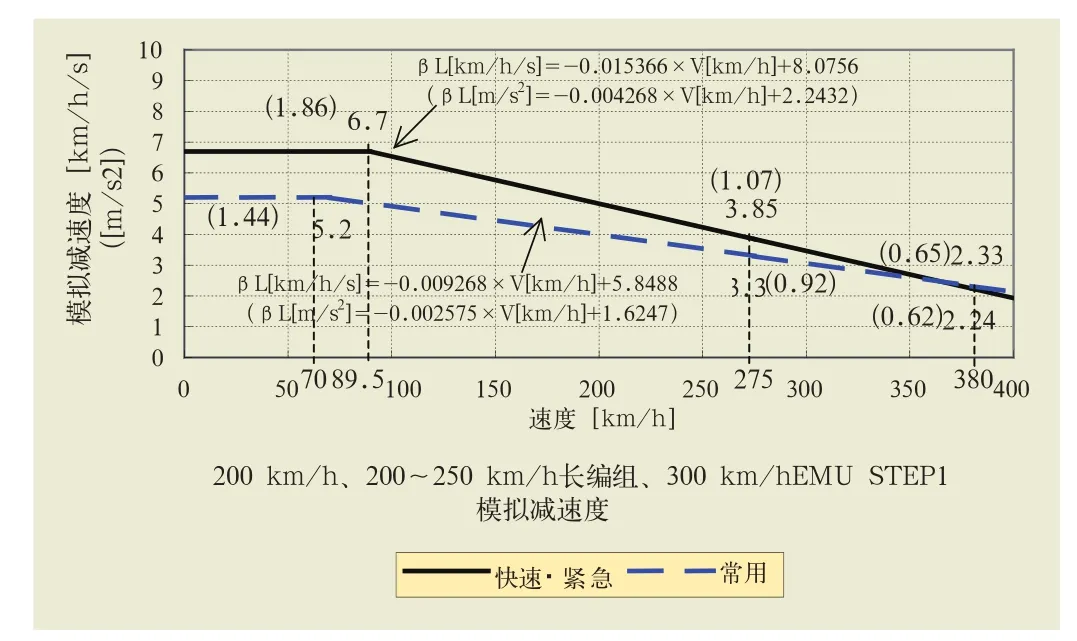
图6 CRH2型动车组模拟轴减速度曲线
2.3 总风压力消耗过大引发总风不足导致列车紧急制动
2012年12月13日CRH2C-2098动车组和2013年1月31日CRH2C-2102动车组途中因总风压力不足造成紧急制动停车。故障原因为当天雨雪天气,轮轨粘着系数较低,动车组在实施较大级别的制动操作后,动车组出现了全列频繁的滑行,BCU进行滑行控制,防滑阀频繁排风,虽然有效的抑制动车组滑行状态避免轮对踏面擦伤,但频繁的排风导致列车总风消耗过快,空压机来不及打风,当总风压力下降至一定值时,触发动车组紧急制动停车。
3 防滑控制优化方案
为解决CRH2 动车组现有的防滑控制回路上电自检功能无法有效检测到防滑阀连接器虚接、低级别制动时全轴滑行无法检测及总风消耗过大引发总风压力不足,并触发列车紧急制动等问题,防滑控软件制作为如下几个方面的优化。
3.1 防滑阀连接器虚接的优化方案
CRH2型动车组仅在二级修作业项目中包含防滑阀自检试验,二级修周期跨度较大,不能及时发现连接器虚接断接的问题,让BCU实时检测防滑阀控制回路状态,会增加BCU工作负荷。故在BCU防滑控制软件加入BCU初次通电时对防滑阀连接器状态进行检查功能,发现异常情况,BCU将故障信息传输到司机室、监控室通知列车工作人员,列车工作人员做好应急处理,避免运行途中发生抱死擦伤故障。
3.2 低级别制动时全轴滑行无法检测的优化方案
对CRH2A-2008故障分析,导致故障发生的原因为低级别制动且发生全轴滑行时模拟轴减速设定不精确所致,故对常用制动模拟轴减速度进行优化设计,增加4N 以下制动的模拟轴减速度如图7所示红色曲线,由于列车速度提高,轮轨粘着系数呈下降趋势,故模拟轴减速度也呈下降趋势,更加贴近列车实际的减速,有效地滑行再粘着控制,避免轮对踏面擦伤。
3.3 频繁滑行排风导致总风压力不足的优化方案
为避免连续滑行过程中总风压力消耗过大触发紧急制动的情况,对C 点检测后的滑行控制策略进行了更新:C 点检测后,延迟500 ms 进行再生制动请求电压的恢复,并对滑行轴的BC 压力进行阶段充气,抑制BC 压力的急剧供给,避免轮对再次发生滑行,降低滑行发生的频次。
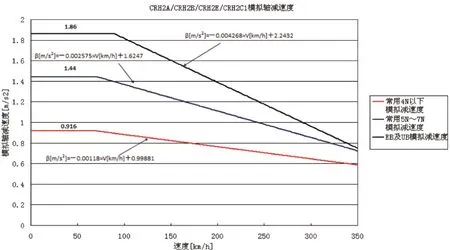
图7 优化后的CRH2型动车组模拟轴减速度曲线
4 结束语
本文主要从防滑阀连接器接触不良、频繁滑行排风导致总风压力不足、小级别制动全轴滑行无法检测等方面对防滑阀软件进行了相应优化,能有效减少防滑系统故障,确保动车组安全稳定运行。虽然通过软件可有效检测防滑阀连接器接触不良,但从连接器结构上进行优化仍有待研究。
[1]南车四方机车车辆股份有限公司.时速200公里动车组维护检修说明书[Z]. 2008.
[2]UIC CODE 541-05.Brakes-Specifications for construction of various brake parts-Wheel Slide Protection device(WSP)[S]. 2005, 11 2nd edition.
责任编辑 徐侃春
Optimization of anti-skid control method for Braking System of CRH2 EMU
GU Xiaoshan
( Shanghai EMU Depot, Shanghai Railway Administration, Shanghai 200071, China )
Commonly, the method of air braking combined with electric regenerative braking was used for highspeed train to control the train speed or stop the train to a standstill. This method was belong to adhesive braking. The braking effect was affected by wheel/rail adhesion coeff i cient. With the increase of train speed, the coeff i cient was on a declining cure, the probability of wheel sliding was increased. So the anti-skid control was of signif i cance. This article analyzed the problems of CRH2 EMU trains’ applications, put forward the plan which could optimize the anti-skid control method, reduced the faults of Anti-skid Control System effectively.
CRH2 EMU; Braking System; anti-skid control
U266.2∶TP39
A
1005-8451(2015)10-0041-04
2015-01-15
顾小山,高级工程师。
