基于超声扫描设备的双直线电机驱动技术
2015-07-04张继静
张继静
(中国电子科技集团公司第四十五研究所,北京100176)
超声扫描检测设备是一种无损检测设备,可以在不破坏器件的情况下检测器件内部缺陷。超声扫描检测设备不仅能检测分层、气孔、裂缝和夹杂等缺陷,而且在判别密度差异、弹性模量、厚度等特性和几何形状的变化方面也具有一定的能力。超声扫描检测设备属于高精度设备,针对原来系统结构中存在的步进轴运动速度慢,检测效率低,定位精度低等缺陷,我们采用双直线电机驱动的结构代替步进电机驱动,有效改善了系统原来存在的问题。
1 超声扫描检测设备结构
超声扫描检测设备系统结构框图如图1所示。三轴运动系统带动超声波换能器对被测器件进行高速扫描,超声波换能器发射超声波并接收反射回波,经过数据采集卡进行转换处理,最终得到一张相应界面的高分辨率超声波图像。
扫描轴驱动机构主要带动超声波换能器沿扫描轴高速往复运动,实现对待测器件的扫描。
步进轴驱动机构的主要功能就是驱动扫描轴沿步进轴方向做低速微步运动,配合扫描轴轴向运动一起来实现扫描- 步进两个方向的协调运动,以实现对整个待测件的完整扫描。
聚焦轴驱动机构的主要功能是驱动超声波换能器和前置放大器沿聚焦轴方向上下运动,以实现对器件的超声波聚焦。

图1 系统结构框图
2 机械结构设计
由于本次步进轴采用高架机构,而直线电机运行速度、加速度比较高,容易造成系统震荡。双驱结构左右两边各有一套光栅尺反馈单元,要求两侧的位置反馈值偏差在10 μm 以内。因此要求两端导轨的平行度、直线度控制在比较高的精度范围内,这就对机械结构设计,零件加工精度和装配调整方法提出了较高的要求。
针对以上问题,机械结构设计上采用叠加方式构成高位龙门式架构模式,这种设计容易保证关键零件加工的精度要求,又能确保整体架构的刚性要求,配以双驱脉冲参数匹配等多种调整方法及测量方式满足了系统性能指标的量值需求。
3 双直线电机驱动控制
双驱直线电机的同步进给对同步精度和快速性的要求要比在单轴驱动时对速度、位移控制的要求更高,因为这涉及到多个控制回路间的互相关系并使其保持一致性,而不仅仅是要求单个回路的高品质问题,往往在多个回路间存在着强烈的耦合和诸多不确定性,从而增加控制难度。
目前直线电机的同步控制可分为三种结构,串联式同步控制结构、并联式同步控制结构和一般主从式同步控制结构。
3.1 串联式同步控制结构
串联式同步控制结构如图2所示,即主动电机的位置输出当作从动电机的位置输入,根据各轴的机械或伺服频宽的差异来调整比例增益。这种控制方法比较简单,但是从轴会因伺服落后而造成跟踪误差,一般情况下,从轴要比主轴滞后2个伺服周期以上。
3.2 并联式同步控制结构
并联式同步控制是在控制器上完成两轴同步的指令规划,如图3所示。在指令方面两个轴是同步的,但由于两轴的运动控制回路相互独立,两个直线电机之间不存在任何交互关系,当一个直线电机受到未知干扰而影响其输出时,则无法保证双直线电机之间的同步性能。
针对并联式同步控制结构的弊端,交叉耦合同步控制结构应运而生,采集一个直线电机的位置误差信号乘以比例值,作为另一个直线电机的速度输入,这种在控制上交叉耦合的控制结构可看作是改良式的并联同步控制结构。

图2 串联式同步控制结构

图3 并联式同步控制结构
3.3 一般主从式同步控制结构
一般主从式同步控制结构是利用主动电机的位置、速度输出以及速度估测分别作为从动电机的命令以及前馈补偿,如图4所示。该结构主动电机受到外界干扰,从动电机会随之运动,但从动电机受到干扰后,其输出变化不会反馈至主动电机,所以对于同步控制系统存在瑕疵。
3.4 系统所采用控制结构
结合设备结构,综合众多的同步控制方案并经过改进,得出了如图5所示控制结构。双电机同步控制系统两根轴采用相同的伺服系统,同时结合交叉耦合控制理论,把两根轴的速度误差信号经过反馈控制器分别给直线电机电流控制器的输入端,以提高系统动态响应和抗干扰能力。
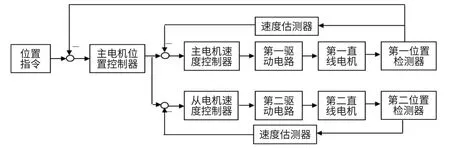
图4 一般主从式同步控制结构
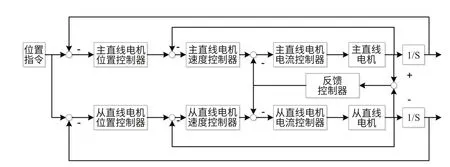
图5 本系统同步控制结构
4 系统运行验证
系统采用两套完全相同的直线电机、驱动器、滤波器以及开放式光栅系统进行反馈,在运动控制程序中加入位置、速度、电流三种控制器,由运动控制卡进行电机运动的控制与监测。加入同步控制算法,按双驱直线电机调试办法进行参数设置,经过底层程序编制、进行PID 调节,系统达到稳定运行状态。利用激光干涉仪记录重复精度、定位精度、最高运行速度。
两个电机同时进给,对400 mm 长的龙门梁选取三个不同位置进行测量。记录各点的重复精度和定位精度,参数如表1所示,仿真曲线如图6、图7、图8所示。
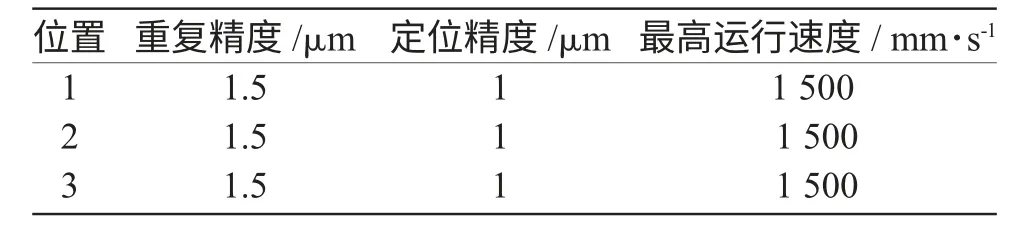
表1 测量结果
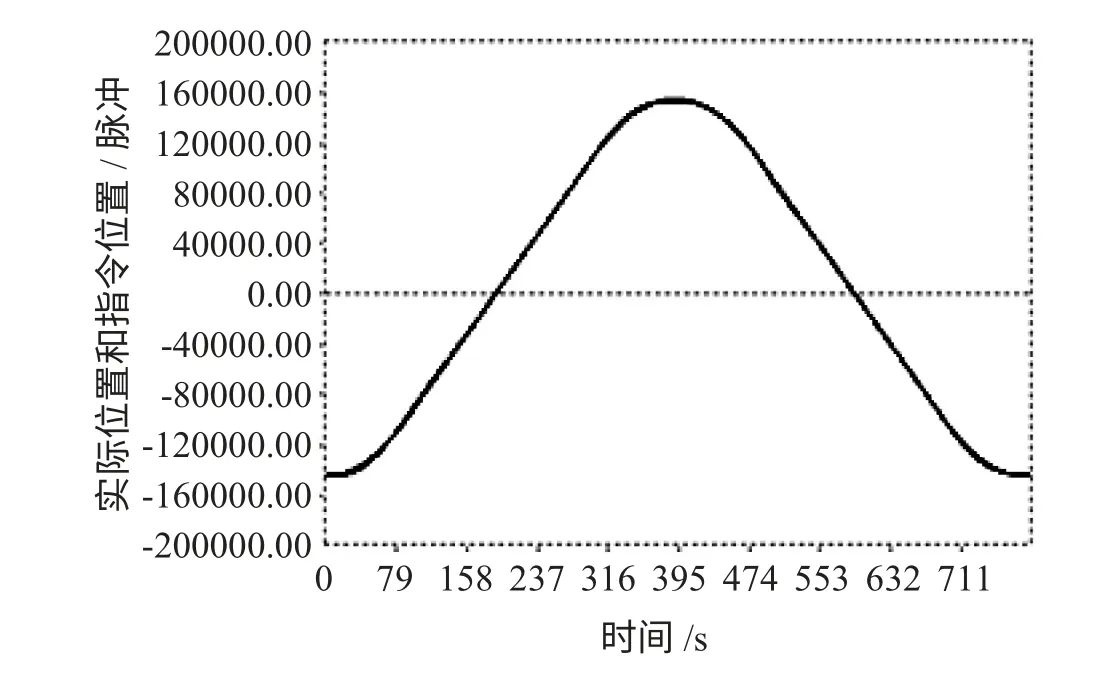
图6 命令与实际抛物曲线对比

图7 命令与实际S 曲线对比

图8 命令与实际阶跃曲线对比
由测量结果可以看出,重复精度与定位精度达到系统要求。
经过参数设置与调整,系统的重复精度和定位精度可以保证系统要求。
通过参数设置与调整,并经过长达3 个月的考核验证,系统的重复精度和定位精度可以满足系统的技术指标。证明本系统双直线电机驱动结构设计合理,系统所采用的双直线电机驱动控制方法有效。
5 结 论
超声扫描检测系统是一种高速高精度的检测设备,本文基于超声扫描检测系统,对双直线电机伺服系统的同步进给问题进行了研究及验证。仿真结果表明系统具有很好的跟随性能,可以达到要求的定位精度和动态误差。
[1]DELTA TAU Data System Inc.PMAC2 USER MANUAL[M].USA:DELTA TAU Data System Inc.2003.
[2]赵春雨,朱洪涛,闻邦椿.多机传动机械系统的同步控制[J].控制理论与应用,1999,16(2):179- 183.
[3]孙宜标,郭庆鼎,石丽梅.基于推力观测器的直线式交流伺服系统滑模变结构控制[J].电工技术学报,1998,15(2):1-5.
[4]郭庆鼎,王成元,周美文,等.直线交流伺服系统的精密控制[M].北京:机械工业出版社,2000.
[5]陆林海,华晓青.基于PMAC 的精密定位系统研究[J].机电一体化,2005,11(1):30-32.