CKVision在分选设备视觉定位中的应用
2015-07-04尚美杰
刘 丹,尚美杰,郭 东,纪 伟
(中国电子科技集团公司第四十五研究所,北京100176)
分选设备的视觉定位系统是采用工业相机将被检测的物体转换成图像信号,传递给图像处理系统,图像处理系统对这些信号进行各种运算来抽取被检测物体的特征,如数量、几何中心、角度、灰度等,再根据预设的搜索范围和搜索条件来输出结果,如几何中心、角度、个数、合格/ 不合格、有/无等,实现自动识别定位功能。
1 分选设备结构与工作原理
分选设备可分为运动部件,机器视觉,人机交互三个部分。其中,运动部件由摆臂和顶针机构、晶片台机构以及工作台机构组成;机器视觉部分由相机、镜头和光源组成;人机交互由工控机、显示器、鼠标和键盘组成。各部件具体组成及相互关系如图1所示。
在分选设备上晶片台机构用于承载晶圆来料,可实现x、y 及z 向运动。工作台机构用于承载Tray 盘,可实现x、y 向运动。摆臂和顶针机构用于实现将芯片从晶片台的晶圆上抓取并放置到工作台的Tray 盘碗杯内,可实现z 向及θ 向旋转运动。视觉系统分为两路,分别设置在晶片台上方和工作台上方,用于实现摆臂和顶针机构的三点对准设置、晶片台侧芯片的识别定位和工作台侧Tray 盘碗杯的识别定位工作。其工作原理是将符合要求的芯片从蓝膜(或UV 膜) 上拾取起来放置到工作台Tray 盘的碗杯内,详见图2所示。
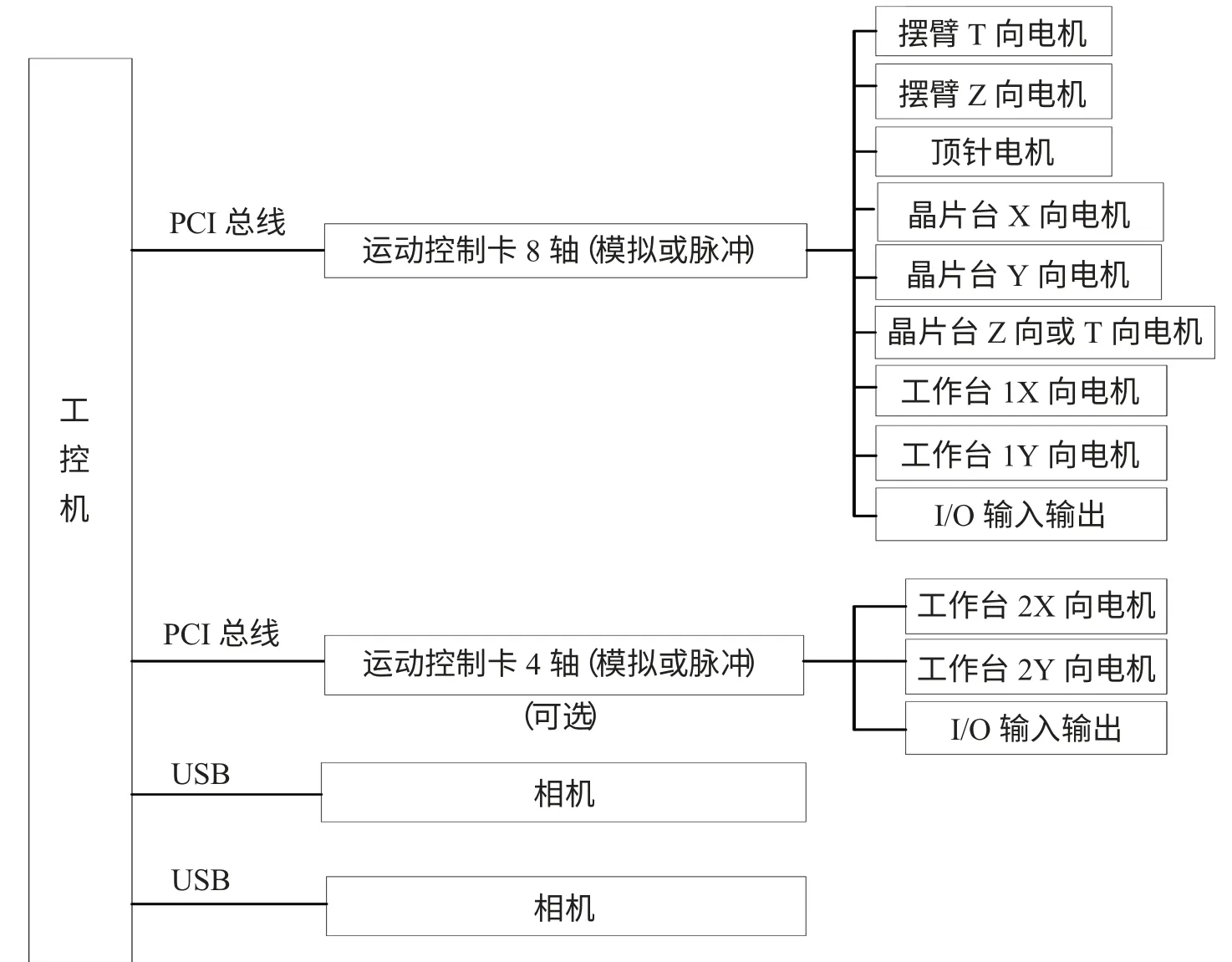
图1 分选设备硬件结构框图
2 原用图像处理软件的不足
分选设备对芯片的抓取和放置都依赖于视觉系统的识别定位,抓取的位置是否正确,抓取的芯片是否合格都取决于图像识别的结果,因此图像识别在分选设置上占有重要地位。
分选设备要求能识别带墨点的芯片,正常光亮条件下带墨点的芯片成像如图3所示,在图像识别处理上对芯片的识别定位主要分为图像特征匹配和图像灰度匹配两种方式。图像特征匹配是提取图像中保持不变的特征进行匹配识别,图像灰度匹配是直接利用全部可用的图像灰度信息进行匹配识别,原图像处理软件对芯片的识别采用图像灰度匹配的方式。这种方式在识别有墨点的芯片时就需要将墨点颜色与芯片颜色尽量区分开,我们通常采用加大相机的曝光值和光源亮度的方式以达到该目的,打亮光源后的图像如图4所示,再适度的调节识别分数从而获得较好的识别率。这种方式虽然可以将墨点识别出来,但过度的曝光降低了相机的使用效率,同时也不可避免的存在识别误差,例如对于面积相对较小的墨点就无法识别。
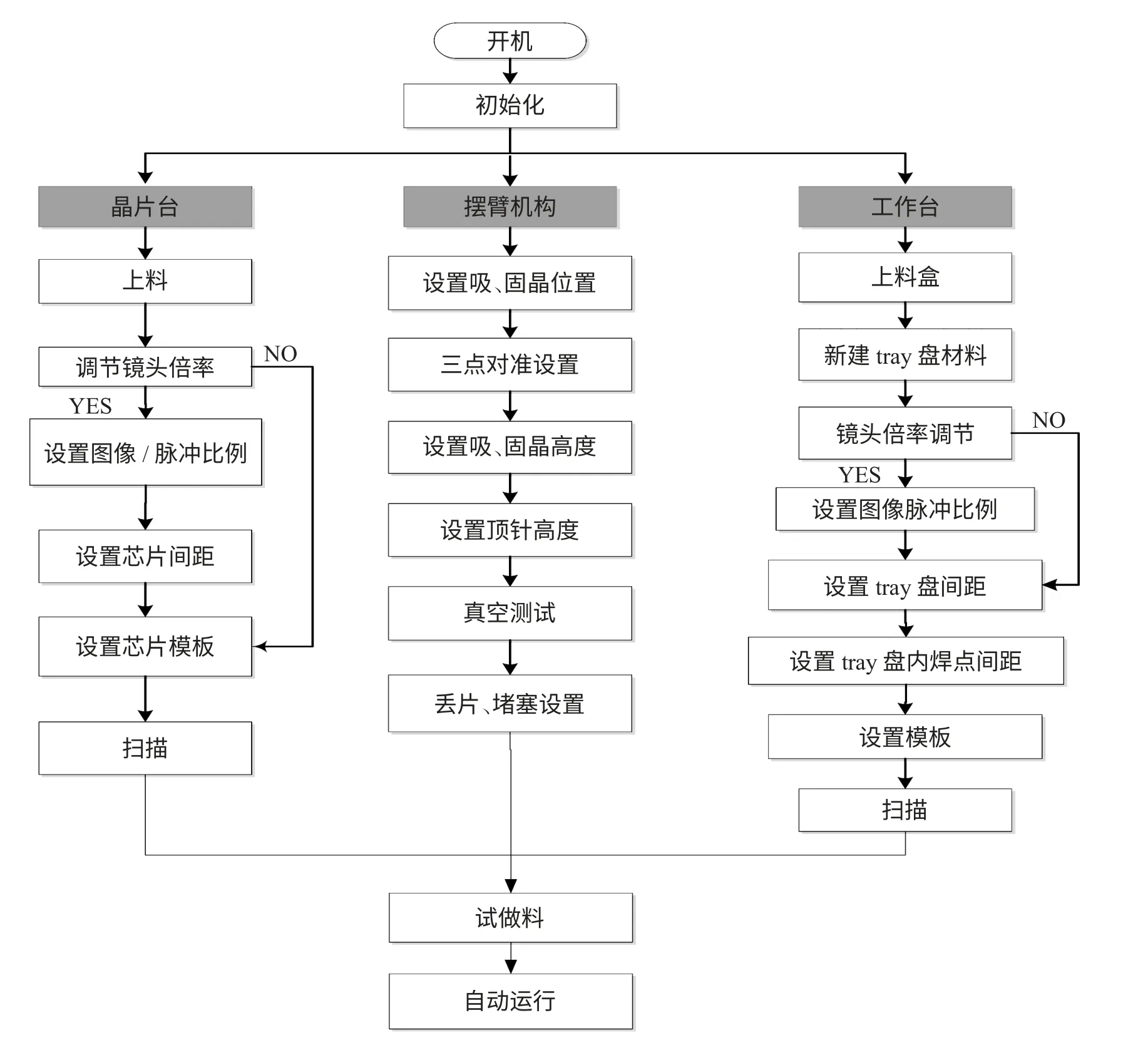
图2 分选设备工艺流程图
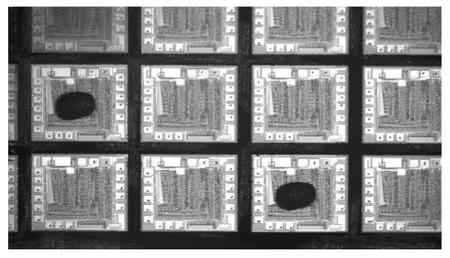
图3 正常光亮条件下芯片成像
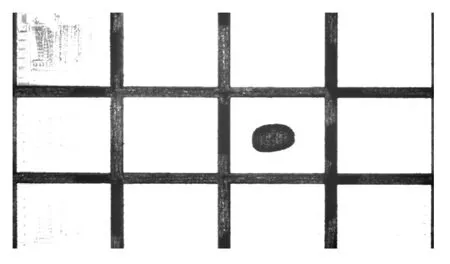
图4 加大光源亮度条件下芯片成像
3 改进软件设计
3.1 CKVision 图像处理软件
深圳市创科自动化控制有限公司是一家高科技软件公司,专业从事开发机器视觉软件系统。公司自成立以来致力于图像算法的研究,成功开发出易编程的CKVision 机器视觉处理软件。CKVision 具有精度高、稳定性强,识别速度快,功能全面,对环境光线干扰不敏感,检测可靠性极高等特点;支持所有图像采集设备,适用范围广;在功能上分为多个模块,以类库形式封装,开发应用方便;全中文开发例程,容易解读;被广泛应用于半导体、电子产品、食品、药品和印刷等行业。
CKVision 视觉软件包含以下功能模块:
图像预处理功能;
二维测量功能;
缺陷检测功能;
目标定位功能;
相机标定功能;
彩色分析功能。
3.2 功能分析及实现方式
考虑使用创科图像处理软件的主要目的是为了解决分选设备对带墨点芯片的识别问题。软件设计时采用将CKVision 的目标定位功能和灰度判定功能叠加使用来解决该问题。先设置模板轮廓线图像如图5所示,再设置灰度分析范围矩形框如图6所示,即在设置模板的过程中不但采集了芯片的特征线同时也设置了灰度分析范围。在识别时先通过轮廓匹配功能来完成对芯片特征的匹配,再对通过特征匹配的芯片采用灰度值统计功能对其需要灰度判定的区域进行灰度分析,最终根据灰度分析结果来确定芯片上是否有墨点,从而实现对芯片好坏的识别。
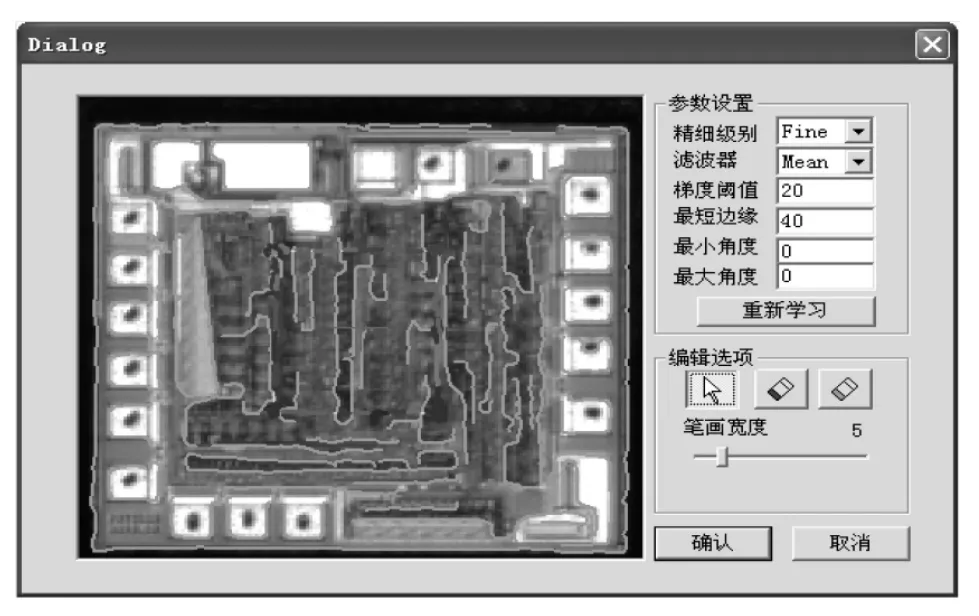
图5 模板轮廓线
考虑好对带墨点芯片的识别问题后再分析设备对图像处理软件的需求,总结为:
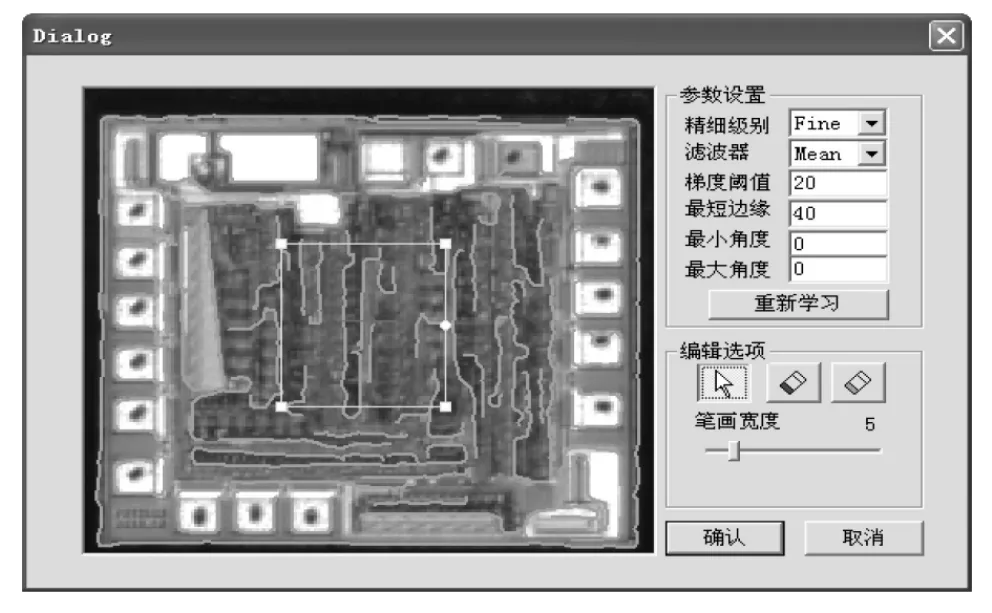
图6 灰度分析范围矩形框
(1)显示功能
◇显示窗口的创建
◇采集图像
◇图像缩放显示
◇图像居中显示
◇画直线标示线
◇画十字标示线
◇画矩形显示框
(2)识别功能
◇学习范围的设置
◇创建模板
◇编辑模板
◇模板保存
◇模板加载
◇设置模板参数
◇保存模板参数
◇识别方式设置
◇识别范围设置
根据以上需求最终确定将CKVision 进行二次封装,封装为一个动态链接库,将需要使用的函数按功能进行封,从而方便整机软件的调用。最终确定的对外接口函数如表1所示。
4 实验结果
封装完成的动态链接库能够与整机软件很好地结合,没有出现错误,实验验证采用轮廓识别和局部区域灰度分析的方式很好地解决了设备对墨点的识别。实验过程及结果分别如图6、7、8 所示。其中图7描述了模板参数的设置,识别方式选为轮廓+灰度识别,特征匹配分数阈值为70,定灰度判定值设置为80。
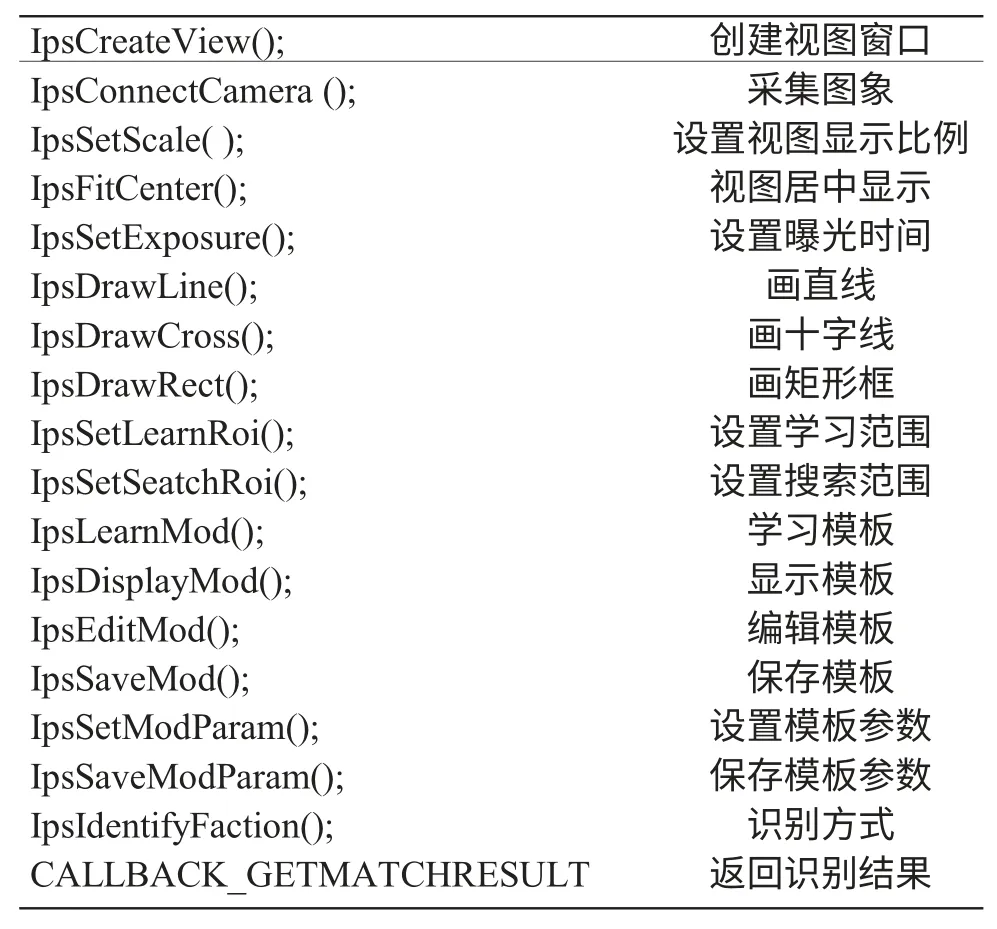
表1 动态链接库对外接口函数
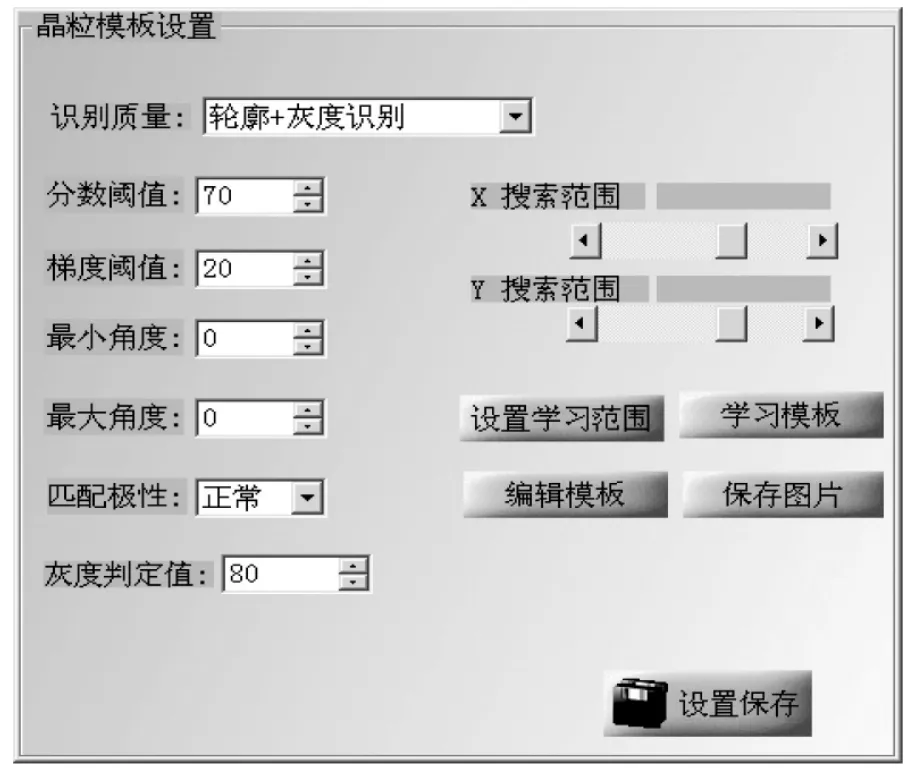
图7 模板参数
图8及表2是分别识别6 颗芯片的图像显示和数据统计。在图8中可清晰的看到1、2、3、4号芯片的只有边框线没有灰度分析框即为合格芯片,5、6 号芯片的虽然有边框线但在有墨点区域却又灰度分析范围框即为不合格芯片。从表2的数据统计结果中也可以看出虽然1~6 号芯片的特征匹配结果分数都在设定的分数阈值之上,但5、6 号芯片的灰度判定值小于设定的灰度判定值。
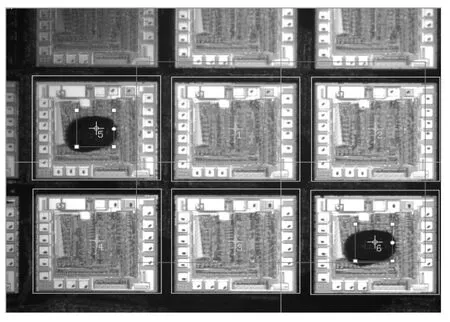
图8 识别结果图像
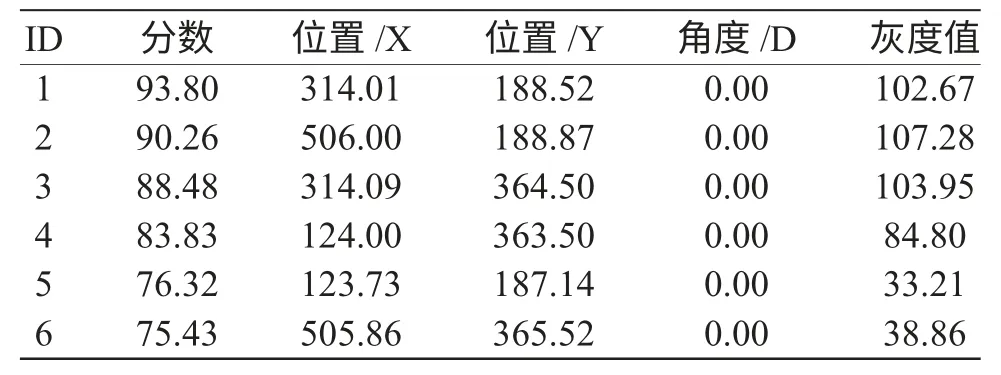
表2 识别结果统计
5 结束语
CKVision 图像处理使用简单,二次开发操作容易,在芯片的识别定位上采用轮廓识别加灰度分析的方式解决了分选设备对带墨点的芯片识别误差大的问题。最终成果动态库稳定,与设备软件能很好的对接,并已成功在客户现象投入使用,收到客户的肯定。
[1]创科自动化控制有限公司.CKVISION 机器视觉软件开发包[Z].2012.
[2]创科自动化控制有限公司.CKVISION5.0 函数说明[Z].2012.
[3]阮秋琦阮宇智等译,数字图像处理(第二版)[M].北京:电子工业出版社,2014.
[4]王亮,蒋欣兰译,机器视觉[M].北京:中国青年出版社,2014.