基于迭代学习的供输弹系统协调器控制研究
2015-07-01靳小军赵宇和
胡 鑫,靳小军,潘 军,赵宇和
(西北机电工程研究所,陕西咸阳 712099)
供输弹系统是中大口径自行火炮的关键系统之一[1-3],它可以大幅度提高自行火炮的装填速度,从而提高火炮的射速。某大口径自行火炮自动装填系统由弹仓、药仓、供弹机、协调器和输弹机组成。供弹机负责将弹仓中的弹丸输送到协调器的托弹盘上。协调器控制托弹盘翻入输弹线,将弹丸运送到输弹线上。输弹机负责将输弹线上的弹丸推入炮膛。输弹过程中,输弹机将弹丸强制推送一定距离,弹丸获得一定的速度后靠惯性运动,以一定的速度卡膛。弹丸的卡膛一致性对弹丸在膛内的运动性能和弹丸出炮口时的初速有较大影响,从而影响火炮的射击精度[4-5]。影响弹丸卡膛一致性的因素主要包括输弹机强制输弹阶段的末速度和弹丸轴线与身管轴线的位置误差[6],其中弹丸轴线与身管轴线的位置误差由协调器的托弹盘翻入输弹线的控制精度决定。目前,托弹盘翻入输弹线通常采用行程开关控制,由于行程开关的位置受到火炮冲击振动的影响,因此会影响托弹盘翻入输弹线的控制精度,从而影响弹丸的卡膛一致性,影响火炮的射击精度。为了提高弹丸的卡膛一致性,对托弹盘翻入输弹线的控制适宜采用闭环控制。目前,闭环控制通常采用PID 算法,PID 算法结构简单,工作可靠,但它对被控对象的参数比较敏感,位置控制精度容易受到协调器机械状态的影响。
迭代学习控制不依赖于系统的精确数学模型,能在系统运行过程中根据前一次的控制输入和跟踪误差调整本次的控制输入,使得系统的输出趋向期望输出。迭代学习控制实际上是在控制过程中能不断地完善自己,使控制效果越来越好,它的控制精度受协调器机械状态的影响较小,特别适合具有重复运动特性的控制系统。考虑到托弹盘翻入输弹线具有重复运动特征,而且迭代学习控制在机械手控制等具有重复运动特征的控制领域获得了很好的控制效果,因此本文将迭代学习控制用于协调器中的托弹盘翻转机构的控制,采用迭代学习控制能够有效抑制由于协调器机械状态变化而导致的托弹盘翻入输弹线位置误差变大的问题。
1 迭代学习控制原理
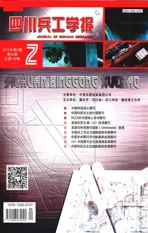
迭代学习控制的原理是利用控制系统先前的控制经验,根据被控系统的期望输出和实际输出,来寻找一个理想的输入特性曲线,使被控对象产生期望运动。“寻找”理想输入特性曲线的过程也就是对被控对象作反复训练的过程,这一过程的数学描述为:在有限的时间t∈(0,T)内,已知被控对象的期望响应yd(t),t∈(0,T)和每次运行的初始状态条件,求解某种给定的输入ud(t),t∈(0,T),使其响应逼近yd(t),t∈(0,T)。迭代学习控制的模型如图1 所示。
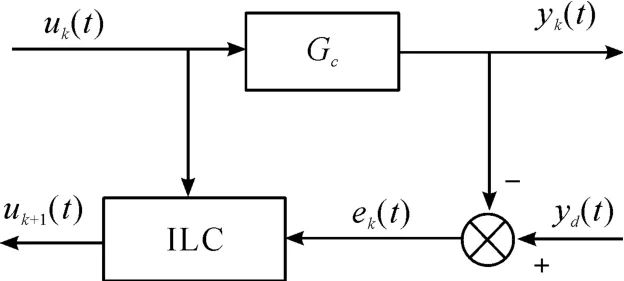
图1 迭代学习控制的模型
图1中,下标k 表示迭代学习的次数,Gc是被控对象,ILC 是迭代学习控制器。在第k 次运行时,系统的输出误差ek(t)= yd(t)- yk(t)。第k+1 次的控制量等于第k 次的控制量加上第k 次输出误差的校正量,即uk+1(t)= uk(t)+L(ek(t)),L 为线性或非线性算子。迭代学习控制器可以采用不同的学习律,不同的学习律决定计算输出误差校正量的算子不同,常见学习律的形式有P 型、PI 型、PD 型和PID 型。
迭代学习控制分为开环学习和闭环学习。开环PID 迭代学习算法中,第k +1 次的控制量等于第k 次的控制量加上第k 次输出误差的PID 校正项,即
闭环PID 迭代学习控制算法中,第k +1 次的控制量等于第k 次的控制量加上当前输出误差的PID 校正项,即

在式(1)和式(2)中:kp为比例因子;ki为积分因子;kd为微分因子。迭代学习控制算法一般的收敛条件是:在t∈(0,T)内,‖ek(t)‖<ε,ε 为允许的跟踪精度。
迭代学习控制算法可以克服机械状态的变化对位置控制精度的不利影响。与普通控制器不同,迭代学习控制器中有一个存储单元,用于将每次的输入及输出误差都保存在存储器中,并刷新前次的控制量,在下次控制时可调用已保存的控制输入并根据迭代学习律做相应的调整后作为速度环的输入,以达到通过调整控制输入来使系统精确跟踪理想输出的目的。
2 迭代学习控制器设计
协调器的托弹盘翻入输弹线由永磁同步电机驱动,本文设计的永磁同步电机控制系统采用全数字三环控制,即位置环、速度环和电流环。全数字三环控制系统的原理框图如图2 所示。

图2 全数字三环控制系统的原理框图
速度环以位置控制器发出的控制量作为输入,以速度传感器测得的托弹盘翻转速度作为反馈。电流环以速度控制器发出的控制量作为输入,以霍尔传感器测得的永磁同步电机定子电流作为反馈。位置环采用旋转变压器作为位置传感器,获得托弹盘翻入的角度。
速度控制器和电流控制器采用PI 控制器,PI 控制器结构简单、算法易于理解和实现、参数调节方便、有较好的控制精度、可靠性高,被普遍应用在永磁同步电机控制系统中。位置控制器采用采用闭环PD 型迭代学习控制律,闭环PD型迭代控制律的表达式

速度环和电流环带宽与位置环相比是数量级的差别,因此假设速度环和电流环可以实现理想跟踪,只考虑位置环,则图2 可简化为如图3 所示的结构框图。图3 中Gc为速度控制器和电流控制器的传递函数,Gp为被控对象。
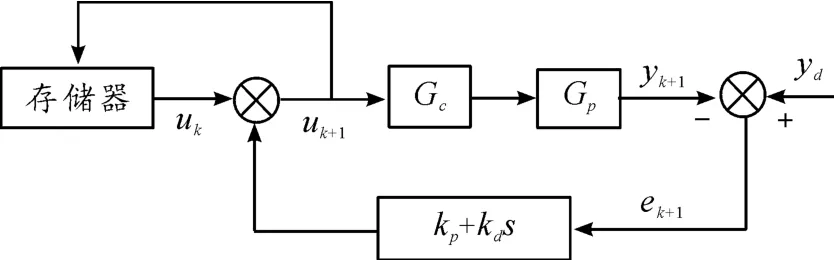
图3 迭代学习控制器结构框图
3 仿真
图4 协调器控制系统仿真框图

图5 40 次迭代学习控制过程中误差均方根的收敛过程
从图5 中可以看出:随着迭代学习次数的增加,协调器控制的位置误差越来越小,位置控制精度越来越高,20 次迭代后,位置控制的误差趋于稳定,有利于提高弹丸卡膛一致性。
4 结束语
针对托弹盘翻入输弹线通常采用行程开关控制,而行程开关的位置容易受到火炮冲击振动的影响,从而影响弹丸的卡膛一致性的问题,本文根据托弹盘翻入输弹线控制具有重复运动特征,设计了基于迭代学习控制的位置控制器,仿真结果表明迭代学习控制器保证了位置控制误差的一致性,从而有利于提高弹丸卡膛一致性。考虑到供输弹系统的多个子系统均具有重复运动特征,后续研究中还可以将迭代学习控制应用在供输弹系统的其他子系统中,提高供输弹系统的性能。
[1]梁辉,马春茂,潘江峰,等.大口径火炮弹药自动装填系统研发现状和趋势[J].火炮发射与控制学报,2010(3):103-107.
[2]刘琮敏,孙大鹏,范志国,等.中大口径火炮弹药自动装填技术[J].火炮发射与控制学报,2013(3):93-96.
[3]徐达,张丽明,张月林.大口径自行火炮自动装填系统结构研究[J].南京理工大学学报,1997,21(3):221-224.
[4]石海军,钱林方,徐亚栋,等.火炮卡膛一致性问题研究[J].弹道学报,2012,24(4):77-81.
[5]李伟,马吉胜,孙河洋,等.弹丸惯性卡膛冲击问题动力学研究[J].振动与冲击,2011,30(5):161-163.
[6]赵良伟,王惠源,张鹏军,等.火炮惯性输弹初始参数对弹丸卡膛稳定性的影响[J]. 中北大学学报:自然科学版,2014,35(2):111-116.