场面多点定位信号处理独立性的实现*
2015-06-28金立杰郭建华
李 恒,王 伟,金立杰,郭建华
(中国民用航空局第二研究所,成都610041)
场面多点定位信号处理独立性的实现*
李 恒**,王 伟,金立杰,郭建华
(中国民用航空局第二研究所,成都610041)
大型机场的场面多点定位(MLAT)系统具有接收站布局复杂和非视距(NLOS)传播严重的特点,为了选择最佳定位站点组合和消除NLOS对目标定位的影响,需要提供一个目标的估计位置。以往采用目标前次定位位置的方式存在将前次定位误差引入到当次目标信号处理中的缺陷。为了实现多点定位系统对目标当次信号处理的独立性,采用一种基于最优水平精度因子(HDOP)的目标位置估算方法,利用当次测量达到时间(TOA)信息,基于最优HDOP,通过快速优选、位置一致性判定和优化站点等方法,快速估计出目标当次二维位置,数据处理系统利用当次目标估计位置完成最佳站点组合选择和NLOS处理。仿真测试和机场场面真实数据测试验证了该方法的可行性,同时表明利用该方法提高了多点定位系统的定位连续性和定位精度。
机场场面监视;多点定位系统;快速优选;位置一致性判定;优化站点
1 引 言
多点定位(Multilateration,MLAT)系统是国外提出的一种新的机场场面监视手段,该技术充分利用民航飞机标准配置空管应答机的A/C模式或S模式应答信号,采用多点无源传感器接收方法确定飞机或其他运动目标的位置。该技术最大的特点在于完全利用机载现有标准空管应答机,无需加装其他机载设备即可完成定位监视,并兼容ADS-B(Automatic Dependent Surveillance-Broadcast)技术,数据更新率高,系统成本较低,定位精度高,并具有目标标识能力,系统监视覆盖范围适应性强。国际民用航空组织(International Civil Aviation Organization, ICAO)、美国联邦航空管理局(Federal Aviation Administration,FAA)、欧洲航空安全组织等民航国际组织已经将多点定位技术和系统作为标准监视系统进行推广,并组织了一系列的验证评估试验工程。多点定位技术现在属于民航监视技术的前沿和热点,目前国内自主研发的多点定位系统在机场现场实施的案例较少,相关技术的工程验证评估还属于起步阶段。因此,设计一套我国自主研发、可靠性高、通用性强的多点定位系统,实现国内自主研发多点定位系统在机场的应用,对打破国外技术垄断具有重要意义。
大型机场的多点定位系统具有接收站数量多且站点布局复杂的特点,接收站的地理位置决定了几何精度因子(Geometric Dilution of Precision,GDOP)的大小,目标位置距离接收站所构成的多边形越远,则GDOP越大。而多点定位系统中,精度因子(Dilution of Precision,DOP)则用来表示定位误差的放大倍数[1-2]。为了减少DOP对误差的放大,需要选择一组最佳的站点组合[3],使其所构成的多边形将目标包住。
另一方面,由于障碍物的阻隔导致接收站和目标之间产生了非视距(Non-Line-of-Sight,NLOS)传播,特别是在大型机场中,由于大量建筑物的存在,非视距传播对定位精度影响很大[4]。因此,在大型机场的多点定位系统中,消除存在NLOS误差的达到时间(Time of Arrival,TOA)测量,也对提高定位精度起到重要的作用。
无论是最佳站点组合的选择,还是NLOS误差的消除,都需要提供一个目标的估计位置[5]。以往采用目标前次定位位置作为最佳站点组合选择和NLOS误差消除所需的位置信息,但经过长期机场现场测试发现,场面多点定位系统输出目标位置存在掉点和目标点迹轨迹错误这两个现象,通过分析发现它们均与采用目标前次定位位置有关。系统采用目标前次定位位置作为最佳站点组合选择和NLOS处理的依据,存在两个方面的缺点:一方面,某种原因造成目标定位更新率降低,而未能及时跟踪目标运动轨迹,从而造成最佳站点组合选择和NLOS处理发生错误;另一方面,由于目标定位更新率降低造成目标位置信息更新超时,目标信息将从系统的目标信息库中删除,最终使得最佳站点组合选择和NLOS处理无目标前次定位信息可用。
为了提高系统对目标当次信号处理的独立性,避免将前次定位误差引入到当次最佳站点组合选择和NLOS处理中去,本文根据最佳站点组合选择和NLOS处理的实际需求,提供一种目标当次二维位置(X,Y)的估计方法,即本文中描述的基于最优水平精度因子(Horizontal Dilution of Precision,HDOP)的目标位置快速估计方法。
该方法基于最优HDOP,利用当次测量TOA信息,通过快速优选、位置一致性判定、优化站点等方法,估计目标当次的二维位置,系统利用这个估计位置完成最佳站点组合选择和NLOS处理,最终达到高精度目标位置输出。
2 方法详述
多点定位系统中的中心数据处理站主要用于处理通过不同接收站接收到的信号时间差(Time Difference of Arrival,TDOA)来计算目标位置[6]。根据机场场面多点定位系统标准[7],机动区的水平定位精度小于12 m占比99%,小于7.5 m占比95%。而大型机场场面存在接收站数量多、站点布设复杂、NLOS影响严重等特点,所以中心数据处理站还需要进行NLOS处理和最佳定位站点组合选择。以往采用目标历史位置作为NLOS处理和站点组合选择的依据信息,但经过长期机场现场测试发现,这种方法会将前次定位误差引入到当次目标信号处理中,从而降低目标定位精度。因此,本文提出利用当次测量TOA信息,基于最优HDOP的原则[8],结合快速优选、位置一致性判定、优化站点等方法,估算一个目标当次信号的二维位置,利用此估计位置完成NLOS处理和最佳站点组合选择,最终输出一个满足多点定位机场场面定位解算要求的目标位置。
HDOP作为本文所述方法重点依据,表示了站点水平几何布局对目标位置估算精度的影响程度。在伪距测量精度相同的条件下,目标位置的HDOP值越小,得到的目标估算位置就越可靠。定位区域HDOP大小与该区域站点布局有关,所以合理安排站点布局,减小定位区域内的HDOP值,是本文所述方法实现可靠目标位置估算中关键的一环。基于最优HDOP站点布局方式[9]研究,机场场面多点定位系统站点布局方式应该满足4个站点包围监视区域的要求。
基于最优HDOP的目标二维位置估计方法流程如图1所示。该方法旨在通过多种优选算法的结合,选择出一组HDOP最优的三站站点组合,并获取该组合解算得到的目标二维位置。为了提高三站站点组合的查找效率,该方法避免使用遍历所有三站组合的方式,而是采用快速优选的方式选择出4组三站站点组合,然后通过位置一致性判定原则,判定4组组合的解算位置是否聚拢。如果位置一致性判定失败,则通过优化站点的方式去除一个站点,然后再重新执行一遍图1中的流程。反之,位置一致性判定成功,则输出4组站点组合中HDOP最优的组合,并将该组合的目标二维位置输出。
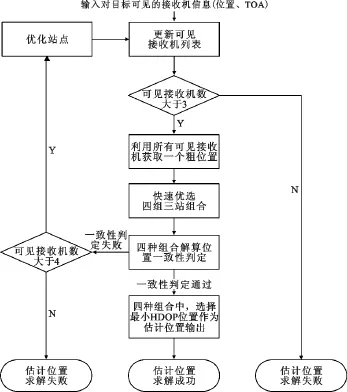
图1 基于最优HDOP的目标二维位置估计方法流程Fig.1 Flow chart of the target location estimation method based on optimal HDOP
2.1 快速优选
快速优选算法是以HDOP为依据,基于基础组合,快速替换站点并获取3个派生组合,从而优选出1个基础组合和3个派生组合的3站站点组合。具体方法是利用对目标当次信号可见的所有接收站信息获取1个目标粗位置,在可见接收站中找到距离粗位置最近的3个站点[R1R2R3]构成基础组合。将可见接收站中不属于基础组合的接收站依次替换[R1R2R3],获取HDOP最优的3个派生组合。最后将1个基础组合和3个派生组合的站点组合编号、二维解算位置、HDOP值输出,具体流程如图2所示。
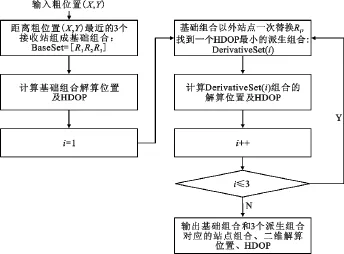
图2 快速优选流程Fig.2 Flow chart of the fast selection method
若对目标信号可见的接收站点总数为N,遍历N个站所有三站组合的次数是C3N,图2描述的快速优选方法,查找次数是3×(N-3)+1。可见,随着N的增大,遍历所有三站组合的查找次数会快速增长。在实际的大型机场多点定位系统中接收站数量较多,如具有双跑道的成都双流国际机场,分布了20个接收站。两种方式随N增大的变化趋势如图3所示,显然图2描述的快速优选方法效率更适合大型机场多点定位系统。
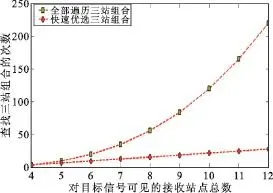
图3 快速优选和全部遍历的效率对比Fig.3 Efficiency comparison between fast selection and complete coverage
2.2 位置一致性判定
快速优选会输出HDOP相对较好的4组三站组合,并输出4组组合对应的目标二维位置。位置一致性判定规则是:4个目标二维位置应该呈现出聚拢分布,若存在一个位置离其他3个位置的距离大于设定的门限值T,则认为位置一致性判定失败;反之,4个位置相互的距离差都小于T,则认为位置一致性判定成功。4组站点组合对应的目标二维位置分别是[P1,P2,P3,P4],最远两点距离小于门限值T,那么位置一致性通过,即


式中,(Xi,Yi)为Pi的二维位置坐标,(Xj,Yj)为Pj的二维位置坐标,T为位置一致性判定门限。
2.3 优化站点
如果位置一致性判定失败,且参与计算的站点数量大于4个站,则使用图4所描述的一种优化站点的方式,选出4个位置中离中心位置最远的位置,找出最远位置对应的站点组合,去除站点组合中离目标最远的站点,然后重新执行快速优选和位置一致性判定。

图4 优化站点方法Fig.4 Flow chart of the station optimization method
本文提出的这种基于最优HDOP的目标位置快速估计方法具有以下三方面的优点:
(1)避免目标高度解算,降低了位置估算难度。
(2)采用快速优选的方法,提高了位置估算效率。
(3)采用位置一致性和优化站点的方法,保证了估计位置的可靠性。
3 机场场面真实数据测试结果
3.1 仿真数据测试
为了测试本文所提方法对目标位置估算的效果,利用基于国内某机场场面布局的仿真实验,考察算法的可行性。仿真测试场景如图5所示,在国内某机场场面仿真7个站点,站点位置如“*”标识。在站点布局覆盖好的第一跑道上模拟目标运动轨迹,一共模拟19 760个目标位置。利用目标理论位置和接收站位置,模拟7个站点的TOA,模拟TOA误差服从N(0,σ2)。将7个站点TOA信息输入到已实现的本文方法模块中,统计出估算目标位置的成功率和误差,从而对估算位置进行定量分析。
按照定量分析结果,位置估算成功率可以达到100%,误差均值4.511 1 m,误差标准差5.412 8 m,目标位置估算方法的估算成功率和精度已满足NLOS处理和最优站点组合选择的要求。
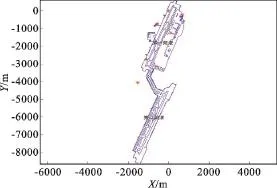
图5 仿真场景Fig.5 Simulation scenario
3.2 真实数据测试
因为本文中当次目标位置快速估计方法的研究,最终目的是在多点定位系统中,利用当次目标估计位置代替前次目标定位位置在NLOS处理和最优站点组合选择中的使用,以达到多点定位系统在机场场面定位效果提高的目的,所以采用实际多点定位系统某日某时间段在国内某机场采集到的机场场面实际目标数据进行验证分析。下面分别比较在使用前次目标位置和使用本文所述当次目标估计位置的两种情况下多点定位系统对此时段的定位效果,对比结果如图6所示,站点位置如“*”标识。
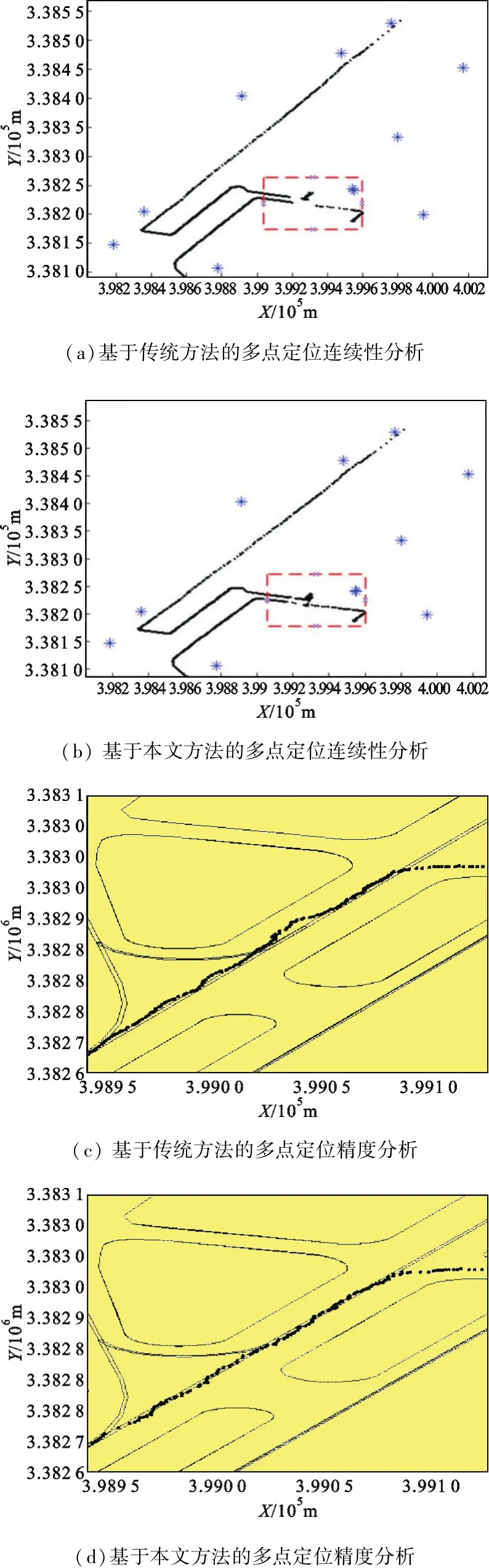
图6 对比结果Fig.6 Contrast results
图6 中,(a)和(b)主要对比利用两种位置信息完成NLOS处理和站点优选后多点定位系统定位结果的连续性,对比区域如图中虚线矩形框标识。受机场场面建筑物和接收站布局的影响,在场面某些区域会出现目标信号被遮挡的现象,由于目标前次位置在多点定位系统中的存储时间较短,从而造成当次NLOS处理和最优站点组合选择时无目标位置信息可用,又因为NLOS处理和最优站点组合选择的失败,使得多点定位系统在较长时间内都不能对目标位置定位成功,最终造成多点定位系统定位连续性下降,如图(a)。如果利用本文所述的当次目标估计位置来完成NLOS处理和最优站点组合选择,能够及时提供两者所需的目标位置信息,加快目标信号从被遮挡到被可见情况下定位点迹的输出,从而提高多点定位系统定位的连续性,如图(b)。
图6中,(c)和(d)主要对比利用两种位置信息完成NLOS处理和站点优选后多点定位系统定位结果的精度。图(c)中的目标点迹明显有一段偏离了滑行道中线,原因是目标某次定位结果精度下降,造成精度不高的位置信息作为目标前次位置而影响了后面连续几次目标信息处理中NLOS的处理和最优站点组合的选择。可见利用目标前次位置来完成目标当次信号的NLOS处理和最优站点组合选择,其直接后果则是将前次定位误差引入到了目标当次信号处理中。如果利用本文所述的当次目标估计位置来完成NLOS处理和最优站点组合选择,可以避免前次定位误差的引入,提高了多点定位系统中当次目标信号处理的独立性,如图(d)中该目标点迹精度明显高于图(c),目标点迹沿着滑行道中线延伸。
4 结束语
多点定位技术作为近年来国外推荐的一种新型机场场面监视技术,在我国的研究还处于起步阶段,我国自主研发的多点定位系统在机场场面的实际应用也刚开始。本文结合多点定位系统在实际机场应用时遇到的具体问题,提出了一种当次目标位置的估算方法,并利用目标当次估算位置代替前次目标定位位置在当次NLOS处理和最优站点组合选择中的使用。
仿真数据和机场场面真实数据测试分析表明,该方法避免了前次定位误差引入到当次目标信号处理中去,实现了多点定位系统当次目标信号处理的独立性,最终提高了多点定位系统的定位连续性和定位精度。该方法对多点定位系统在机场场面目标监视的应用具有通用性,对多点定位系统在大型机场场面实际使用方面有较好的应用价值。
[1] 宫峰勋,雷艳萍,许跃,等.机场场面多点定位系统定位精度研究[J].计算机工程,2011,37(15):276-278. GONG Fengxun,LEI Yanping,XU Yue,et al.Research on Multilateration System Positioning Precision for Airport Surface[J].Computer Engineering,2011,37(15):276-278.(in Chinese)
[2] 文富忠,孙克宇,徐定杰.基于GDOP的导航定位误差和最优岸台设计算法的研究[J].哈尔滨工程大学学报,2002,23(2):47-50. WEN Fuzhong,SUN Keyu,XU Dingjie.Algorithm of Navigation Fixing Error and Optimum Radio Launch Pads Design Based on GDOP[J].Journal of Harbin Engineering University,2002,23(2):47-50.(in Chinese)
[3] 吴宏刚,刘昌忠,黄忠涛.机场场面多点定位系统远端站优选方法[J].电讯技术,2009,49(12):5-8. WU Honggang,LIU Changzhong,HUANG Zhongtao.Multilateration Station Selection Method for Airport Surface Surveillance[J].Telecommunication Engineering,2009, 49(12):5-8.(in Chinese)
[4] 苟举.基于蜂窝网无线定位技术TDOA的误差分析[J].广东通信技术,2011,31(4):33-39. GOU Ju.Cellular network-based positioning technology TDOA Error Analysis[J].Guangdong Communication Technology,2011,31(4):33-39.(in Chinese)
[5] 赵春晖,吴周.基于NLOS环境下的TOA/AOA混合定位算法[J].哈尔滨工业大学学报,2007,39(1):85-89. ZHAO Chunhui,WU Zhou.A TOA/AOA hybrid location algorithm based on NLOS[J].Journal of Harbin Institute of Technology,2007,39(1):85-89.(in Chinese)
[6] KONCHENKO I.Availability Analysis of the Multilateration Surveillance System in Kiev(Boryspil)Airport[C]// Proceedings of MRRS-2008 Symposium.Kiev,Ukraine: IEEE,2008.
[7] EUROCAE ED-117,MOPS for Mode S Multilateration System for Use in Advanced Surface Movement Guidance and Control Systems(A-SMGCS)[S].
[8] THOMAS D W.Method for use in a multilateration system and a multilateration system:USA,7557754[P].2009-07-07.
[9] 钱镱,陆明泉,冯振明.基于TDOA原理的地面定位系统中HDOP的研究[J].电讯技术,2005,45(3):135-138. QIAN Yi,LU Mingquan,FENG Zhenming.Research on the HDOP of a TDOA Land-Based Positioning System [J].Telecommunication Engineering,2005,45(3):135-138.(in Chinese)
LI Heng was born in Chengdu,Sichuan Province,in 1982.She received the M.S.degree from University of Electronic Science and Technology of China in 2007.She is now an engineer.Her research concerns airport engineering and air traffic management.
Email:liheng100@163.com
王 伟(1982—),男,湖北荆州人,2008年于电子科技大学获硕士学位,现为工程师,主要研究方向为机场工程、空中交通管理;
WANG Wei was born in Jingzhou,Hubei Province,in 1982.He received the M.S.degree from University of Electronic Science and Technology of China in 2008.He is now an engineer.His research concerns airport engineering and air traffic management.
金立杰(1983—),女,天津人,2008年于电子科技大学获硕士学位,现为工程师,主要研究方向为多点定位、信息与通信安全;
Implementation of Surface Multilateration Signal Processing Independence
LI Heng,WANG Wei,JIN Lijie,GUO Jianhua
(The Second Research Institute,Civil Aviation Administration of China,Chengdu 610041,China)
The characteristics of Multilateration(MLAT)system include complex station distribution and serious non line of sight(NLOS)influence when used in large airport surface.For improving positioning accuracy,an estimative target position is needed to select best station combination and remove NLOS influence.In the past,the previous position of target is used as the estimative target position,which has a defect that the previous positioning error is introduced into the current target signal processing.Therefore,a new method called target position estimation based on best horizontal dilution of precision(HDOP)is used for achieving signal processing independence.This method uses some new algorithms include fast selection,location consistency judging and stations optimization to estimate the current target position.Simulation test and real airport data test results prove the feasibility and validity of this new method.In large airport surface,this method can increase the continuity and accuracy of positioning in MLAT system.
airport surface surveillance;MLAT system;fast selection;location consistency judging;station optimization
e was born in Tianjin,in 1983.She
the M.S. degree from University of Electronic Science and Technology of China in 2008.She is now an engineer.Her research concerns multilateration technology,information and communication security.
The National Natural Science Foundation of China and Civil Aviation Administration of China Jointly Funded Foundation Project(U1433129);The Civil Aviation Foundation of Innovation and Guidance(MHRD20130110)
TN967.5;V249.32
A
1001-893X(2015)12-1384-06

李 恒(1982—),女,四川成都人,2007年于电子科技大学获硕士学位,现为工程师,主要研究方向为机场工程、空中交通管理;
10.3969/j.issn.1001-893x.2015.12.013
李恒,王伟,金立杰,等.场面多点定位信号处理独立性的实现[J].电讯技术,2015,55(12):1384-1389.[LI Heng,WANG Wei,JIN Lijie,et al. Implementation of Surface Multilateration Signal Processing Independence[J].Telecommunication Engineering,2015,55(12):1384-1389.]
2015-04-28;
2015-07-14 Received date:2015-04-28;Revised date:2015-07-14
国家自然科学基金与中国民用航空总局联合资助项目(U1433129);民航创新引导资金项目(MHRD20130110)
**通讯作者:liheng100@163.com Corresponding author:liheng100@163.com
郭建华(1982—),男,湖北黄石人,2012年于电子科技大学获博士学位,现为高级工程师,主要研究方向为机场工程、空中交通管理。
GUO Jianhua was born in Huangshi,Hubei Province,in 1982.He received the Ph.D.degree from University of Electronic Science and Technology of China in 2012.He is now a senior engineer.His research concerns airport engineering and air traffic management.