椭圆型最优控制问题中的L1,2-方向稀疏
2015-06-27严春梅张维
严春梅,张维
(成都理工大学管理科学学院,成都610059)
椭圆型最优控制问题中的L1,2-方向稀疏
严春梅,张维
(成都理工大学管理科学学院,成都610059)
介绍一种带有L1,2-方向稀疏项的椭圆型最优控制问题,分析条纹稀疏模式,从理论角度研究该问题的一阶最优性条件。为解决不可微控制问题,基于广义微分,提出一个半光滑牛顿方法,将问题在泛函空间中进行表示和分析,并具有局部超线性收敛率。
方向稀疏;非光滑正则化;半光滑牛顿
引言
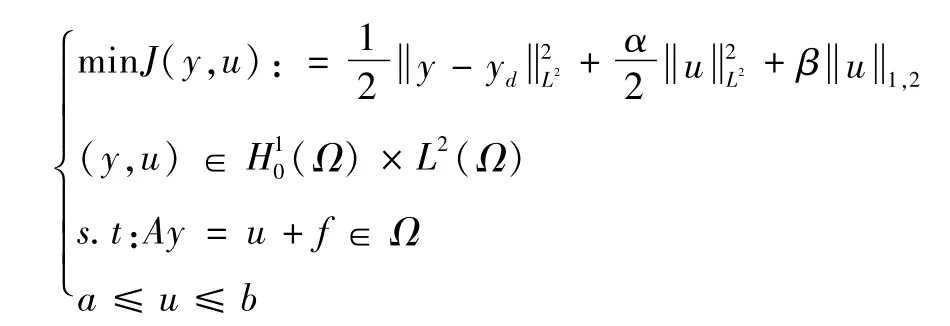
罚项是L1类型的最优控制问题能产生稀疏解[1]。即控制函数在区域的某些部分为0,因为在这些点,不必要应用控制。分析一个带有稀疏测度的椭圆型问题,稀疏测度能够促进条纹稀疏模式。考虑带有条纹稀疏模式的椭圆型的最优控制(p)问题:Ω∈Rn是一个有界区域,带有足够光滑的边界Γ=∂Ω,yd,a,b∈L2(Ω),且在Ω上几乎处处有a<0<b,α,β≥0。A:H10(Ω)→H-1(Ω)是二阶线性椭圆型微分算子,并且和分别代表L2(Ω)和L1(L2(Ω))范数,y是状态,u是控制变量,yd是理想状态。
非光滑项在偏微分方程(PDE)的最优问题中经常被用于反问题的正则化,如处理图像过程[2]。文献[3],L1-正则化被使用在PDE的最优控制背景下。文献[4]分析了带有非方向稀疏项的椭圆型最优控制问题。除稀疏项外,L2范数的平方是成本函数的一部分,它允许问题在Hilbert空间结构下被分析,用牛顿类型算法解决[5]。方向稀疏项在2012年被Heraog R[6]第一次提出,从理论到数值的实现都具有很大的难度,本文在此基础上研究椭圆型问题的方向稀疏项,着重研究其理论和计算方法。
1 预备知识
空间Ω⊂RN,N≥2是一个有界可测集,可以RN=Rn×RN-n(1≤n<N)将其按坐标分割。故有集合:

Ω1可以看作Ω在RN上的射影,Ω2(x1)是Ω在x1∈ Rn方向的横截面。方向稀疏项的一般形式为:

引理1[6]L1,2的对偶空间是Bochner类型空间L∞,2。L∞,2是定义在Ω上的所有测度函数φ且是有限的。

引理2[6]在u∈L1,2(Ω)的次微分为:L2(Ω2(x1))范数的次微分为:


2 一阶最优系统
用一个减少公式的问题替换(p)。这个问题的减少仅仅涉及到控制变量u,因为微分算子A存在逆映射A-1:H-1(Ω)→H10(Ω),则减少后的问题是(^p):

这是一个在Hilbert空间上凸的最优性问题。


对所有的u∈Uad都成立,其中,伴随状态¯:=-),次微分?。
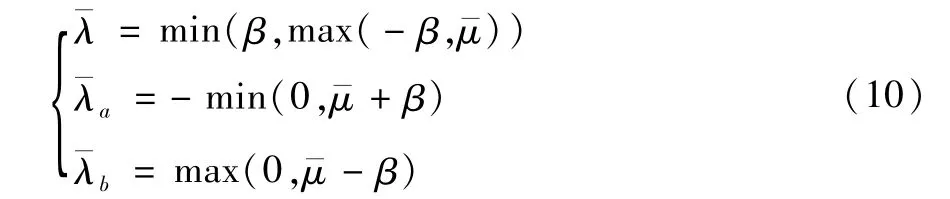
变分不等式(2)式几乎需要在所有的地方进行逐点讨论。但在文献[7]允许存在非负函数和在中起到不等式约束的拉格朗日乘数,而且估计微分¯λ∈涉及到¯u的符号,由此引进拉格朗日乘数和则变分不等式(2)式变为:


用(9)式和(10)式替换(4)-(8)式,对于c>0,则替换后的系统为非光滑方程:

因此,最大、最小函数就可以被理解为逐点。
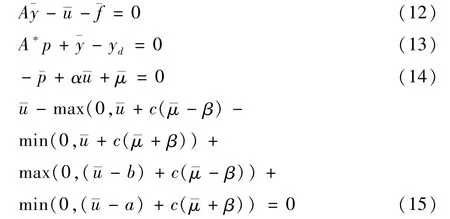
其中,c>0,可以得到无方向稀疏项的(p)的最优性条件,就是令β=0,则(12)-(14)式仍然保持不变,(15)式变为:
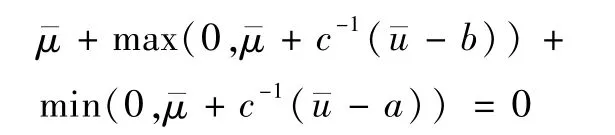
已经用于构建一种算法,应用于双边控制约束最优控制问题。
3 半光滑牛顿法
半光滑牛顿方法研究有限维函数空间,常用于最优控制问题。在确定条件下,局部超线性收敛甚至全局收敛性都可以被证明。
X,Y是Banach空间,D⊂X是开的,F:D→Y是非线性映射。映射F是在开集U⊂D中是广义可微的,若存在一个映射g:U→L(X,Y),对每个x∈U,都有:

假设用牛顿迭代法发现半光滑映射F(x)=0的一个根¯x。则下面局部收敛性结果成立。
定理2[8]假设¯x∈D是F(x)=0的一个解,F在¯x的一个开领域U内是半光滑的,且有广义微分g。若对所有的x∈U,g(x)-1都存在}是有界的,初始值x0∈U已知,则牛顿迭代xk+1=xk-g(xk)-1F(xk)是定义明确的,如果x0足够的接近¯x,则具有超线性收敛率。
用牛顿法求解(12)-(15)式的解,需要半光滑的逐点的最大和最小算子。它们的定义为
映射:
可以作为Fmax,Fmin在v处的广义导数。
由(14)式可以推出¯μ=¯p-α¯u,代入(15)式中,并令c:=α-1,则有

由于c的选择[9],只有¯p出现在逐点的最大和最小算子中,且¯p具有更多的规律性。为了更加明确,引进算子:

则¯p:=-A-*(A-1¯u+A-1f-yd)可以写成¯p=S¯u+h。考虑映射T:L6,2(Ω)→Ls(Ω),
定义Tu=p=Su+h。严格的说,Tu=I(Su+h),I表示H10(Ω)嵌入到Ls(Ω)中。可以知道T是定义明确的,且是连续的。由于它是仿射,所以它也是Frechet可微的。用T¯u替换(18)式中的¯p,定义)
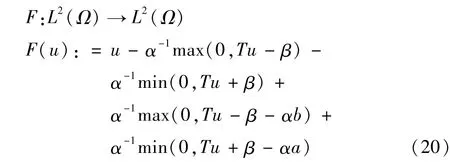
紧凑的形式F(u)=0表示最优系统(12)-(15)式。讨论函数F的广义可微性,并用牛顿迭代法求解F(u)=0,即为(p)问题的解。
定理3如(20)式定义的函数F是广义可微的,广义导数为:

其中,J-,J+是互不相交的集合:

证明因为放射算子T具有光滑性性质,则对于每一个u∈L2(Ω)都有Tu∈Ls(Ω)(s>2)。这表明映射

是光滑的,此外,F1的广义导数为g1(u)(v)=χA(Sv),χA代表集合A={x∈Ω:Tu-β≥0在Ω上}的特征函数。在(20)式中,最大和最小函数可以进行类似的讨论。可以得出整个函数F是广义可微的合并特征函数,可以得到F的广义导数为(21)式。证毕。
求解(p)问题具体算法(半光滑牛顿算法)。(1)给出初始值u0∈L2(Ω)并令k:=0。(2)除非某些停止准则是满意的,否则计算广义导数g(uk),导出δuk,更新uk+1:=uk+δuk,令k:=k+1,并回到第一步。

应用定理2的半光滑牛顿算法的结果是收敛的。
定理4初始值u0足够靠近(p)的解¯u,则半光滑牛顿法迭代的uk在L2(Ω)中超线性收敛于¯u。而且,相应的状态yk在H10(Ω)中超线性收敛于¯y。
使用的半光滑牛顿方法服从有效集的设置。与半光滑牛顿方法有关的“双重有效集”[10]和“非有效集策略”[11]已经被广泛的讨论和应用。
4 结束语
本文从理论上分析了方向稀疏椭圆型最优控制问题,该问题可以被基于广义微分的半光滑牛顿法解决,且具有超线性收敛率。进一步的研究可以用双重有效集法。方向稀疏项为L0,2类型的偏微分最优控制问题是非凸且高度非线性的,至今还有待解决。
[1]Nikolova M.Analysis of the recovery of edges in images and signals by minimizing nonconvex regularized leastsquares[J].Multiscale Model,2005,4(3):960-991.
[2]Troltzsch F.Optimal Control of Partial Differential Equations:Theory,Methods and Application[M].Providence:American Mathematical Society,RI,2010.
[3]Clason C,Kunisch K.A duality-based approach to elliptic control problems in nonreflexive Banach space[J]. ESAIM ControlOptimal,2011(17):243-266.
[4]Wachsmuth G,wachsmuth D.Cocergence and regularization results for optimal control problems w ith sparsity functional[J].ESAIM Control optimal,2011(17):858-886.
[5]Casas E,Herzog R,Wachsmuth G.Optimality conditions and error analysis of semilinear elliptic control problems w ith L1 cost functional[J].SIAM J,Optimal,2012,22(3):795-820.
[6]Herzog R,Stadler G,Wachsmuth G.Directional sparsity in optimal control of partial differential equations[J]. SIAM Journalon Controland Optimization,2012,50(2):943-963.
[7]Troltzsch V F,W iesbaden.Optimal Steuerung partieller Differentialgleichungen[M].W iesbaden:Vieweg,2005.
[8]Sun D,Han J.New ton and quasi-New ton methods for a class of nonsmooth equations and related problems[J]. SIAM J.Optimal,1997(7):463-480.
[9]Hintermüller M I,Kunisch K.The primal-dual active set strategy as a semi-smooth New ton method[J].SIAM J. Optimal,2003,13(3):865-888.
[10]Davis T A,Hager W W.A sparse proximal implementation of the LP dualactive set algorithm[J].Math.Program-Mathematical Programming,2008,112(2):275-301.
[11]Ito K,Kunisch K.The primal-dualactive setmethod for nonlinear optimal control problems w ith bilateral constraints[J].SIAM.Control.Optimal,2004,43(1):357-376.
L1,2-Directional Sparsity of Elliptic Optimal Control Problem s
YAN Chunmei,ZHANGWei
(School of Administrative Science,Chengdu University of Technology,Chengdu 610059,China)
The elliptic optimal control problemswith L1,2-directional sparsity are introduced and the stripe sparsemode is analyzed.Emphatically,the first-order optimality conditions of the problem are studied from the theory angle.For solving the non-differentiable control problem,a semi-smooth Newton method based on the generalized differential is proposed,with which the problem can be stated and analyzed in the functional space and has local superlinear convergence rate.
directional sparsity;non-smooth regularization;semi-smooth Newton
O29
A
1673-1549(2015)01-0076-04
10.11863/j.suse.2015.01.18
2014-08-09
严春梅(1992-),女,四川宜宾人,硕士生,主要从事应用泛函分析方面的研究,(E-mail)yanchunmei199202@163.com
