风力发电风向跟踪负荷控制系统算法设计与实现
2015-06-27宁平华夏兴国张庆丰
宁平华,夏兴国,张庆丰
(马鞍山职业技术学院,安徽马鞍山243031)
风力发电风向跟踪负荷控制系统算法设计与实现
宁平华,夏兴国,张庆丰
(马鞍山职业技术学院,安徽马鞍山243031)
为实现风力发电机主动迎风提高发电效率,提出一种以西门子PLC为核心的风向跟踪与叶片方向控制的算法。该算法包括IFL智能软件滤波、PID控制及ODM输出调度等部分。基于该算法的风向跟踪负荷控制系统能够快速、精准实现各种偏航控制任务,自动偏航仅需3 s便能实现,超调量指标可控制在5%以内,且在偏航结束后能使叶轮旋转平面与来流风向保持垂直,误差控制在±1°内。此外,还具备自动解缠绕和风暴发生时侧风以保护设备的安全等功能。
风力发电;主动迎风;风向跟踪;PLC;PID控制
Abstract:In order to realize an active windward movement of the leaf in wind turbine generator to improve the generation efficiency,the paper put forward a wind direction tracking and leaf orientation algorithm with a Siemens PLC as its core.The algorithm includes IFL intelligent software filter,PID control and ODM output scheduling,etc.The wind direction tracking and load control system based on this algorithm can quickly and accurately fulfill various yaw control tasks.Automatic yaw process generally takes about 3 seconds,the overshoot can be controlled under 5%,and the angle between leaf plane and wind flow direction can be 90(±1) degrees.In addition,it also has the function of automatic unwrapping and crosswind to keep equipment safety in a wind storm.
Key words:wind power generation;active windward movement;wind direction tracking;programmable logic controller;PID control
风能是一种干净的可再生能源。风能作为一种新的、安全可靠的洁净能源,其优越性已为越来越多的人所认识[1-3]。风力机在发电时叶轮平面需与风向垂直以获取较大的风能,因此随着风向的变化需调整叶轮平面使之迎风。调整叶轮平面进行迎风有主动迎风和被动迎风2种。由于风向存在离散性,被动迎风时叶轮平面频繁摆动。在大型风力发电机中,因调向力矩大,叶轮平面频繁摆动对调向机构的寿命影响严重,故一般采用主动迎风。主动迎风需根据风向和叶轮平面法线方向确定调向,虽结构复杂,但迎风过程可控。
本文主要内容就是研究主动迎风风力发电机的风向跟踪控制算法及软件实现,使迎风调向准确稳定,对延长风力设备调向机构的寿命和提高发电量均具有实际意义[4-6]。
1 风力发电机系统组成及偏航系统
风力发电机系统基本包括风力机桨叶、齿轮箱、发电机、控制、偏航及刹车等组成部分。其中偏航系统是风力发电机组的伺服系统的一部分,它具有以下功能:其一,稳定的风向跟踪功能;其二,当电缆发生缠绕时,具有自动解除缠绕功能。偏航系统工作原理为:通过风传感器采集风向、风速信号,并将信号送至PLC,由PLC计算风向与机舱当前位置之间的夹角,判断机舱位置是否需要调整,以及需要调整时最短的调整路径[7-12]。
2 风向跟踪控制系统设计方案
整个控制系统由硬件和软件部分组成。硬件部分由风传感器、PLC、上位机、偏航电机、偏航编码器等硬件组成。上位机软件使用Visual Basic 编制而成,对整个系统起监测和控制的作用。
系统采用S7-300 PLC 作为系统主控制站,利用Step7软件编制控制程序,作为系统的直接数字控制中心,并通过RS-485总线与上位机进行数据传递。系统主要硬件结构见图1。
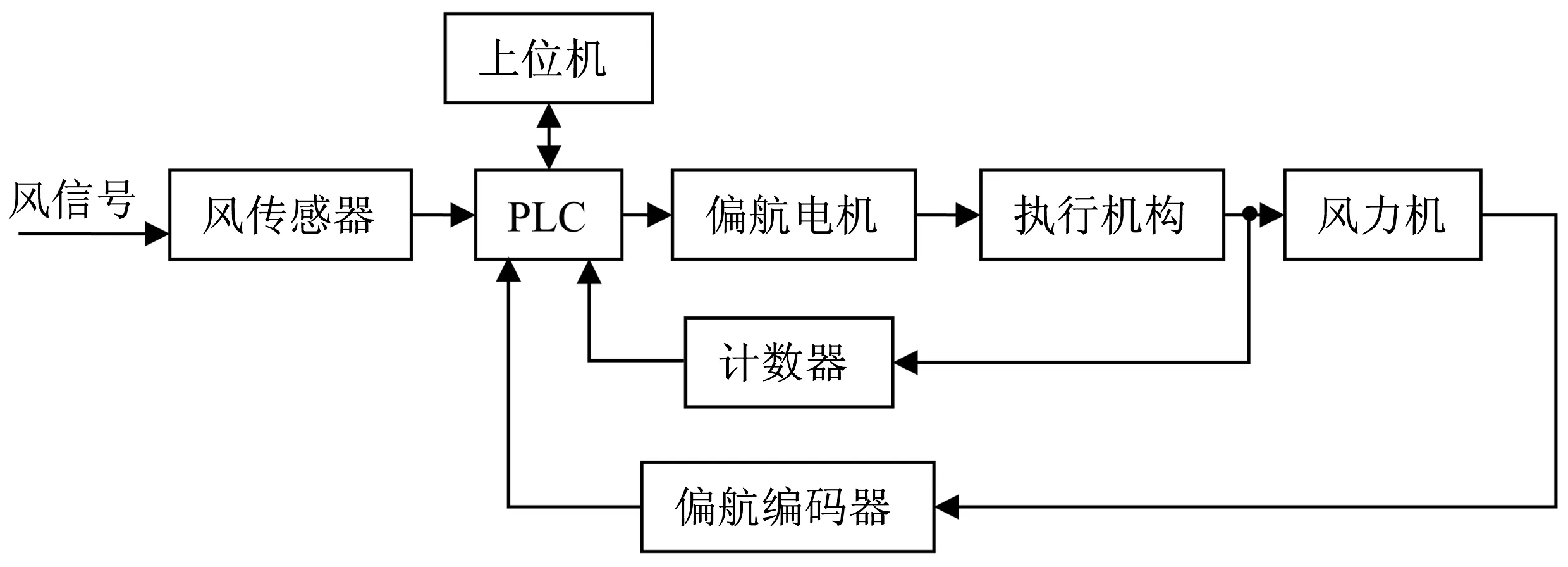
图1 系统主要硬件结构
系统各组成部分主要功能如下说明。
1) 风传感器 系统选用FT702LT风传感器,在设置好基准风向之后,它能够准确将风向和风速信号转换成4~20 mA 电流,并将信号传送至PLC。为了避免自然风流经风机时产生的叶轮湍流对测量结果的扰动,风传感器通常安装在测风塔上。
2) 偏航编码器 系统使用倍加福PVM58N绝对值编码器,通过联轴器与风力机短舱相连。偏航时,短舱带动编码器一起转动。短舱的每一个机械位置都与1个具有唯一性的编码相对应,并被快速、准确地以Profibus-DP通讯方式将其传送至PLC系统存储区中。
3) 偏航电机 系统采用YTJ-90-4/300 单相异步齿轮减速电机作为执行机构,驱动风力机短舱和叶轮随风向的变化而旋转,实现跟风、对风与解缆等任务。它具有体积小、负载特性优、调速范围宽、机械特性硬及既有机械又有电子的无级调速等诸多优点。
4)西门子S7-300系列PLC 作为直接数字控制中心,接收基准风向信号、风向风速信号和风力机短舱位置信号,经过算法处理生成控制指令并将其转换成相应信号发送给偏航电机,同时与上位机保持实时数据通讯。
5) 上位机监控程序 通过上位机监控程序将系统运行状态和系统故障等信息以数据、图形或表格等形式直观显现,对整个系统进行实时监测,在需要时还可以通过对PLC的逻辑处理过程进行过程性干预控制,以防风暴等意外状况破坏整个发电系统。
3 控制系统的软件功能
整个软件功能结构流程如图2所示。
风向角、偏航角均以正北为0°,以顺时针方向由南—西—北—东到南为-180°~180°。偏航电机转动范围为顺时针0°→180°和逆时针-180°→0°,任一方向到达极限后需反转360°再重新调节。由此产生的2种偏转情况见图3所示。
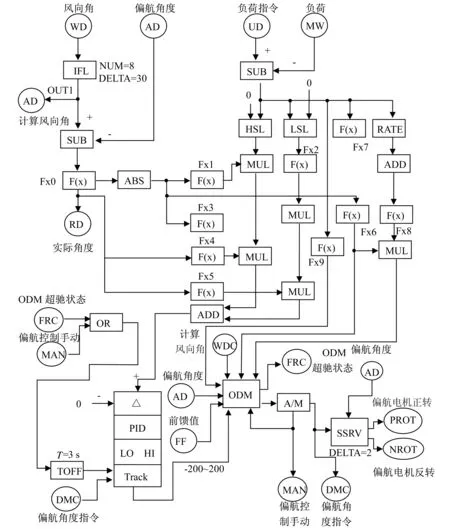
图2 软件功能结构流程图
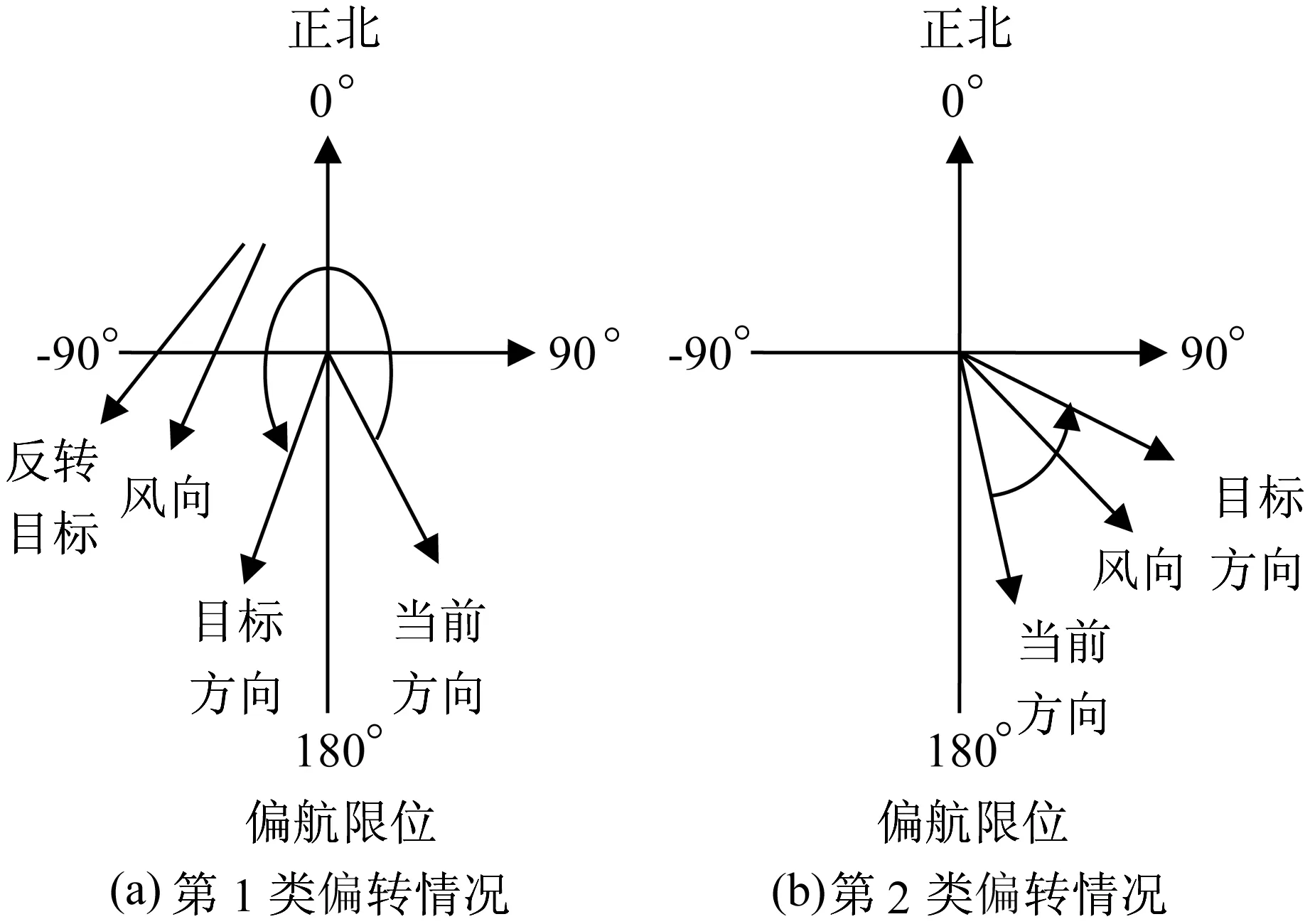
图3 2种偏转情况
负荷控制算法描述如下说明。
1)实际进行风向测量中伴有虚假信号,在软件中采用IFL滤波器剔除噪声点。
2)整个负荷控制规律为:
a.升负荷(控制偏差为正)情况。在实际角度RD较小时,偏航控制作用弱,此时需增大增益快速调节负荷;RD较大时,则正常调节。
b.降负荷(控制偏差为负)情况。在实际角度RD较小时,偏航控制作用弱,此时需增大增益快速调节负荷;RD较大时,则正常调节。在控制偏差较大时,为防止超负荷需进一步增大增益。
根据以上2个原则,设置FX1~FX4系数。
c.FX5~FX6设置控制方向。当RD﹥0时,为正作用;RD﹤0时,为反作用。另外,还可添加控制死区。
d.FX7~FX8设置ODM模块的正、反向动作阈值。正向阈值根据RD的余弦值确定;反向阈值加入负荷偏差修正;在超负荷且负荷增加时,适当减少反向阈值以快速限制负荷。
e.FX9设置回转阈值。当超负荷时,设置大回转阈值,禁止回转。
3)ODM输出调度管理模块。对输出进行平滑处理,并处理回转、超驰、过“0”等特殊情况。
4)SSRV为软伺服模块,根据指令反馈情况控制电机正反转。
前馈值功能子模块软件结构流程如图4所示。
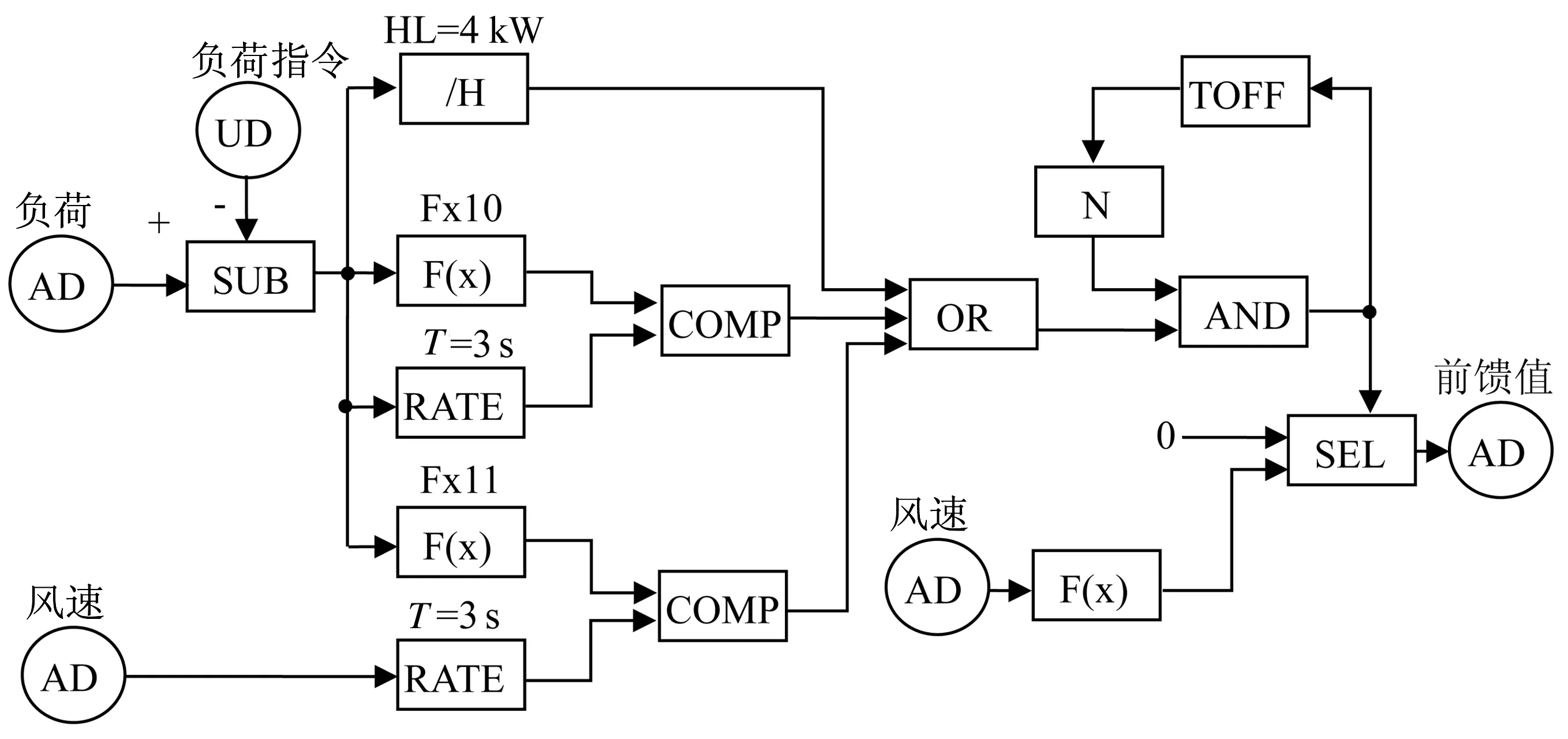
图4 前馈值功能子模块结构流程图
当遭遇极端大风天气,风速超过最大值时,系统执行90°侧风以防电压过高使发电机组烧毁。
在执行侧风程序时,先会将自动偏航指令屏蔽,再控制以最短路径调整到侧风位置,侧风操作完成后马上抱紧偏航闸。如果大风风向发生变化时,继续进行追踪,始终保持侧风,以确保发电机组安全。
刹车功能子模块结构流程图见图5。
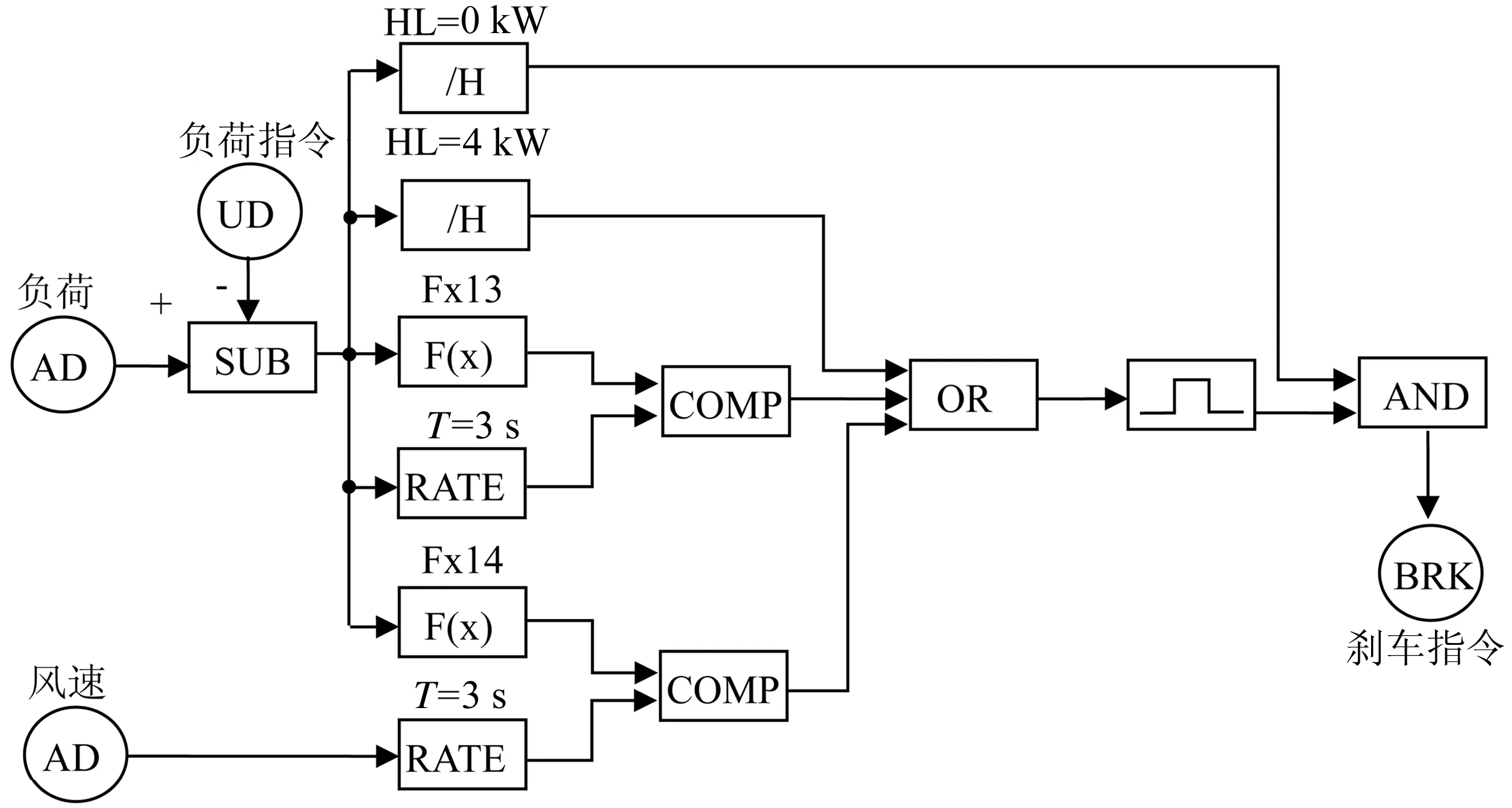
图5 刹车功能子模块结构流程图
4 软件主要功能块流程图
该项目在具体实现过程中,由于前期调试过程中一些函数功能的系数不确定性以及高级语言的便利性,先采用Visual Basic高级编程语言编写实现上述软件功能,最后通过PLC控制单元直接输出控制对象。
在VB编程的程序实现上述功能并调试实现功能后,最后将上述软件移植到S7-300的PLC中,其中一部分复杂的算法控制用ST语言来编写,PLC的主程序还是采用PLC的梯形图编程方式实现。
由于在项目实现过程采用多种语言,为实现通用可移植性,主要函数均采用C语言来描述。其中自动偏航子程序的流程图如图6所示。
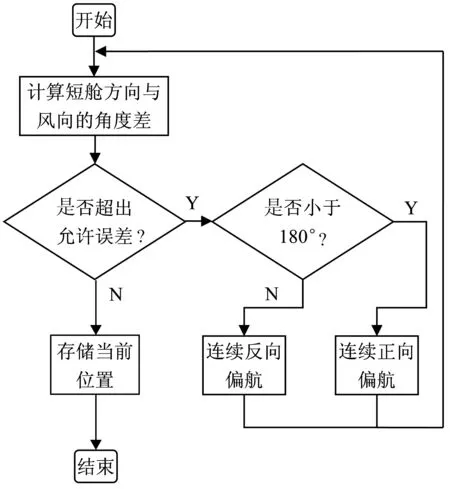
图6 自动偏航子程序的流程图
5 结语
本文针对某电力公司中小型风力机科研项目设计出一种风向跟踪负荷控制系统,该系统性价比高。样机实测结果表明:系统性能稳定高、故障率低;该系统能实现快速、精准进行风向跟踪及偏航控制任务,3 s内便能完成自动偏航过程,且超调量指标在5%以内;系统不存在在目标位置来回振荡现象;系统调整完成后,能使叶轮旋转平面与来流风向基本保持垂直,角度偏差控制在±1°
内。同时,该系统还具备自动解缠绕和风暴发生时侧风以保护设备安全等功能。
[1]刘万琨,张志英,李英凤,等.风能与风力发电技术[M].北京:化学工业出版社,2008.
[2]叶杭冶.风力发电机组的控制技术[M].北京:机械工业出版社,2006.
[3]王志新,张华强.风力发电及其控制技术新进展[J].低压电气,2009(19):2-9.
[4]魏列江,张振华,胡晓敏,等.中小型风力机偏航控制系统设计[J].电气技术,2011,30(2):75-77.
[5]许世霞,孙以材,潘国峰.基于流量传感器的风速风向测量与无线数据传输[J].传感器世界,2009,15(2):48-51.
[6]张僖,龚德利.基于C8051F单片机的车载移动风向风速仪设计[J].上海应用技术学院学报,2009,9(2):130-133.
[7]陈梅,洪飞,李鑫,等.风速风向传感器在风机控制中的应用于研究[J].自动化技术与应用,2008,27(4):38-41.
[8]卜飞飞,胡育文,黄文新,等.基于DSP 控制的风力机偏航控制系统研究[J].电气传动,2010(4):3-6.
[9]吴根忠.基于PIC16C65的低功耗风速风向记录仪[J].机电工程,2003,20(3):10-13.
[10]徐德,诸静.风力发电机风向随动控制系统[J].太阳能学报,2000,24(2):186 -191.
[11]XIA Yuanye,KHALED H,BARRY W W.Wind turbine power coefficient analysis of a new maximum power point tracking technique[J].IEEE Transactions on Industrial Electronics,2013,60(3):1122-1132.
[12]SENJYU T,SAKAMOTO T,URASAKI N,et al.Output power leveling of wind turbine generator for all operation regions by pitch angle control[J].IEEE Transactions on Energy Conversion,2006,21(2):467-475.
责任编辑:陈 亮
Algorithm Design and Realization of Wind Direction Tracking and Load Control in Wind Power Generation System
NING Pinghua,XIA Xingguo,ZHANG Qingfeng
(Maanshan Technical College,Maanshan 243031)
10.3969/j.issn.1671- 0436.2015.06.004
2015- 09- 14
安徽省高校省级优秀青年人才基金重点项目(2013SQRL145ZD)
宁平华(1982— ),男,硕士,讲师。
TM83
A
1671- 0436(2015)06- 0016- 05