一种新型SPMSM无位置传感器驱动系统研究
2015-06-26樊生文刘东李正熙
樊生文,刘东,李正熙
(北方工业大学电力电子与电气传动工程研究中心,北京100144)
1 引言
永磁同步电机自身具有结构简单、体积小、效率高、功率因数高等优点,在各种工业场合有着广泛的应用。在永磁同步电机磁场定向控制系统中需要准确的转子位置信息,这就需要光电编码器或旋转变压器等传感器来检测转子的位置,但这些传感器会导致在一些场合下系统成本高,可靠性差,电磁兼容等诸多问题[1]。
永磁同步电机无位置传感器矢量控制就是期望在无位置传感器情况下获得与传统矢量控制方式同样的性能。文献[2]指出目前相关的速度/位置估计方法主要分为两大类:一类是高频信号注入法,它通过处理注入电机的电压、电流信号响应情况来估计转子速度/位置,相比于其他速度/位置估计方法,这种方法在低速和零速下会更加有效;另一类是基于电机模型及参数的计算方法,主要包括状态观测器、磁链观测器和反电动势法。其中,状态观测器、磁链观测器等复杂估计算法比较适用于电机高速运行,同时这些算法均因为过于复杂、成本过高而很难应用于实际系统[3]。另外就是基于电机数学模型的反电动势速度/位置估计方法,这种方法直接从数学模型中提取反电动势,但同时也会导致在电机参数不准确的情况下系统出现稳态估计误差。针对这一问题,本文对传统反电动势观测器进行了一定的改进,并引入锁相环(PLL)结构来消除稳态估计误差[1],从而确保估算器能够快速、准确地获取转子位置及速度信息。仿真和实验验证了该控制算法具有调速范围宽、动态响应快及控制系统可行性、实用性强等特点。
2 数学建模与系统拓扑结构
2.1 表贴式永磁同步电机数学模型
表贴式永磁同步电机的永磁体安装在转子上,工作状态下会产生正弦波反电动势。由于永磁体的磁导率比较低,接近于空气的磁导率,因此它的有效气隙大(Ld近似等于Lq,实际上由于一些凸极性Ld<Lq)。忽略了阻尼绕组电路,并且用恒流源替代磁场绕组电路后可以得到表贴式永磁同步电机的等效电路,如图1所示。
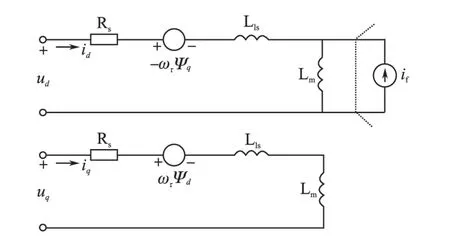
图1 表贴式永磁同步电机在d-q轴下等效电路Fig.1 The equivalent circuit of surface-mounted permanent magnet synchronous motor in the d-q axis
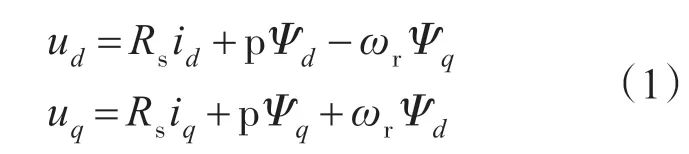
基于表贴式永磁同步电机的等效电路,可以得到其在d-q 轴下的数学模型[4],主要包括电压方程、磁链方程、转矩方程及运动方程。
电压方程为
磁链方程为
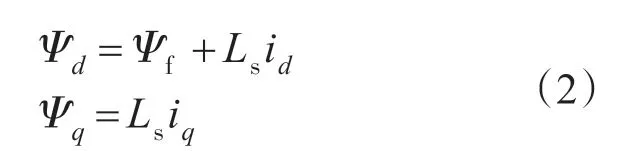
式中:Ls=L1s+Lm,L1s为漏感,Lm为互感。转矩方程为

该方程中无磁阻转矩和阻尼转矩,np为极对数。运动方程为

式中:Tl为负载转矩;J 为转动惯量;B 为摩擦系数。
2.2 无位置传感器磁场定向控制
SPMSM磁场定向控制(即矢量控制)策略具有能耗低、效率高、控制性能好等诸多优势,因此在目前行业产品中有着广泛的应用。该控制策略是将转子磁通作为定子和气隙磁通的参考坐标系,目的是去除定子电流转矩分量和励磁分量之间的耦合。由于SPMSM的气隙磁通等于永磁体产生的转子磁链与定子电流产生的电枢反应磁链之和,对于磁场定向控制的恒定转矩模式,采用励磁电流分量idref为零的方法,d轴气隙磁通仅与Ψf相等,d轴电枢反应磁通为零。与此相对,在恒定功率运行时,励磁电流分量idref用于削弱气隙磁场,从而提高转速。本文主要关注恒转矩模式下的SPMSM无位置传感器磁场定向控制,图2给出了该系统控制原理框图。
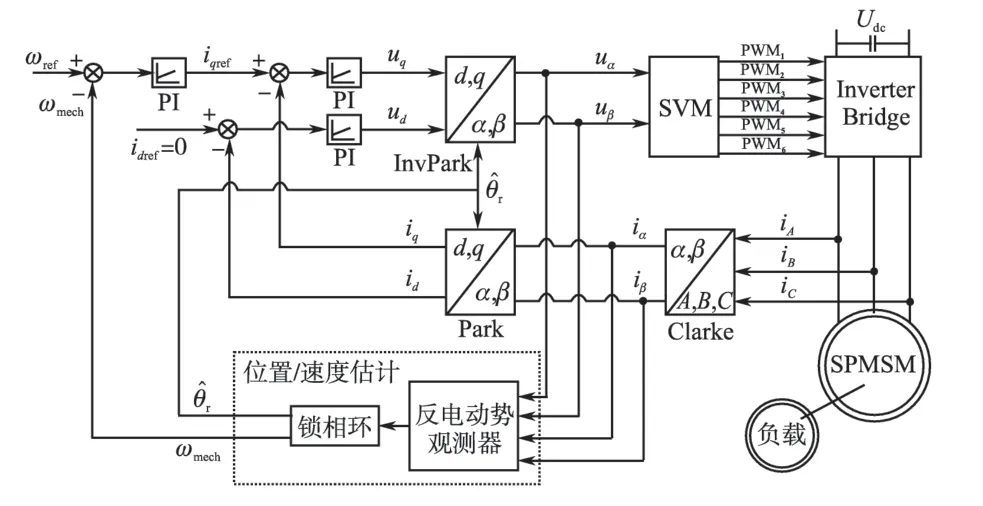
图2 SPMSM无位置传感器磁场定向控制框图Fig.2 The block diagram of sensorless field oriented control for SPMSM
在无位置传感器磁场定向控制中,关键是确保一个稳定、可靠的速度/位置估算器,使它可以不受外界温度、磁场等干扰。另外,由于在位置及速度估计过程中不可避免地会出现计算反电动势与实际反电动势的偏差,那么就会出现转子位置角度上的偏差,并且反电动势d轴分量越大,角度偏差就越大。图3 所示为实际磁场定向的d-q轴参考坐标系与估计d-q轴参考坐标系的空间矢量图[5]。
通过上述分析可知,反电动势d 轴分量不为零会使速度/位置估计结果出现偏差,然后通过PLL校正环节来消除反电动势q轴分量的估计偏差,以实现转子位置和速度的观测。
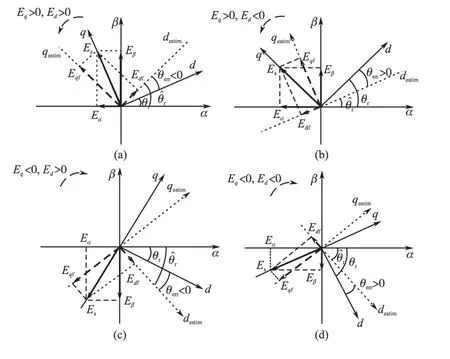
图3 实际与估计的同步定向参考坐标系空间矢量图Fig.3 Space vector diagram with actual and estimated synchronized orientation frames
3 速度/位置估计算法
下面介绍这种通过PLL 校正反电动势来估计转子速度/位置的方法,这种方法主要根据电机数学模型、反电动势计算及PLL校正。在估计旋转坐标系下的电压方程可以写成式(5)、式(6)的形式。
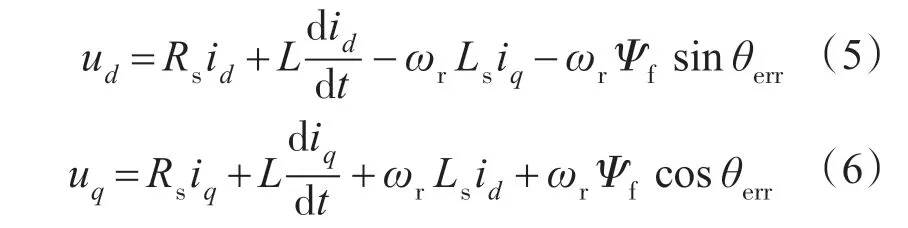
式中:θerr为角度误差。

式中:θr为实际的转子位置角度;为估计的转子位置角度。
从式(5)可以得出系统在稳态运行时,如果其估计的位置角度与实际位置角度一致,那么其反电动势的d轴分量应为零,本文介绍的速度/位置估算器正是基于该原理,估算器的结构如图4所示。
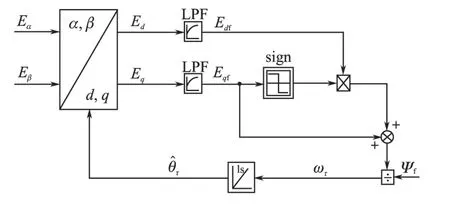
图4 转子速度/位置估算器结构框图Fig.4 The block diagram of rotor speed/position estimation
在两相静止坐标系下,通过检测得到的定子电压uα,uβ及定子电流iα,iβ,根据下式计算得到反电动势α,β分量为
关于反电动势α,β分量的计算,在实验中发现对电流α,β分量的微分会引起较大的噪声,使系统产生一定的震荡,为消除这种噪声所引起的问题,采用每8个采样周期对电流进行1次微分,对传统反电动势计算方法的改进可以使估算器具有更好的估计效果。
式中:iα(k),iβ(k),iα(k-8),iβ(k-8)分别为相应的采样时刻电流信号。
然后根据式(10)、式(11)对反电动势的α,β分量进行Park变换,得到旋转坐标系下反电动势的d,q 分量,再分别通过低通滤波器(LPF)进行滤波,目的是为进一步降低噪声干扰,同时滤波器也不会引起反电动势估计上的动态变化。

PLL校正环节根据反电动势q轴分量eqf的方向,用反电动势d 轴分量edf对反电动势q 轴分量eqf进行校正,校正后的eqf除以永磁体磁链Ψf得到估算角速度ωr为

最后,由式(15)对ωr进行积分得到θ^r,同时这种处理方式还可以避免系统计算过程的数值不稳定问题。
4 实验分析
4.1 实验条件
电机参数为:额定功率750 W,额定转矩2.39 N·m,额定电流3.9 A,额定频率150 Hz,额定转速3 000 r/min,线-线电阻1.4 Ω,线-线电感7.5 mH,反电势常数50 V/(kr·min-1),极对数3,直流母线电压300 V。控制电路以TMS320F2808DSP为核心,数字控制周期为100 μs,死区时间为3 μs,主电路功率模块采用型号为FSBB15CH60的SPM。另外,为了有效研究本文改进控制策略的有效性,电机上安装了2 500 线的增量式编码器来提供实际转子位置信息,用于实验比较。
4.2 空载实验
为了验证本文提出的新型SPMSM无位置传感器驱动系统性能,鉴于电机在低速区运行情况的好坏是反映系统性能的重要指标,因此对该系统做低速200 r/min的空载稳态实验[7],实验结果如图5所示。
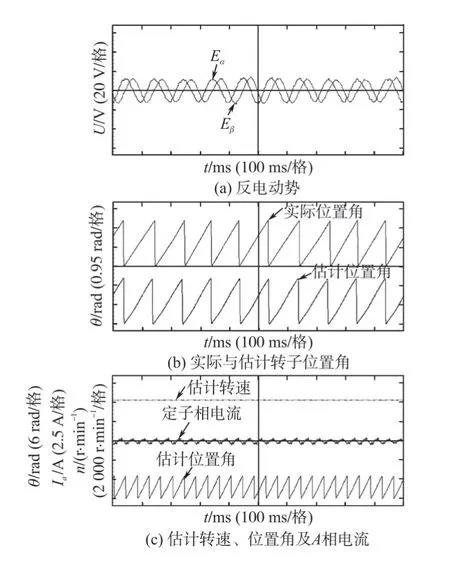
图5 200 r/min时稳态实验结果Fig.5 Steady-state experimental results with 200 r/min
从低速实验结果可见:1)转子反电动势正弦度较好,改进的反电动势观测器起到了很好的抑制噪声的作用;2)转子位置观测值与实际值非常接近,误差较小;3)转速及电流比较平稳,确保了电机能够在低速下稳定运行。
为充分验证该算法的估计准确性,另选择1 000 r/min时测试其估算情况,如图6所示。
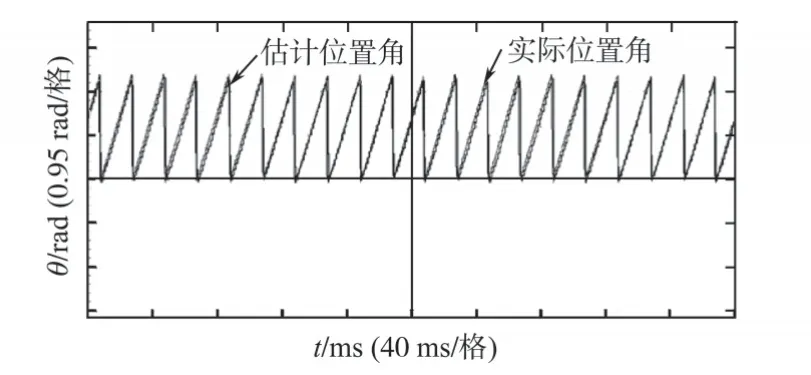
图6 1 000 r/min时转子位置角估计值与实际值Fig.6 Actual and estimated rotor position angle with 1 000 r/min
从对比试验结果可以看出,电机在中高速下转子位置信息估计值依然能够很好地跟踪其实际值,误差小,估算效果较好。
为验证该系统的动态性能,进行转速动态响应实验,转速指令从200 r/min 升至3 000 r/min,然后再降至200 r/min时的波形如图7所示。
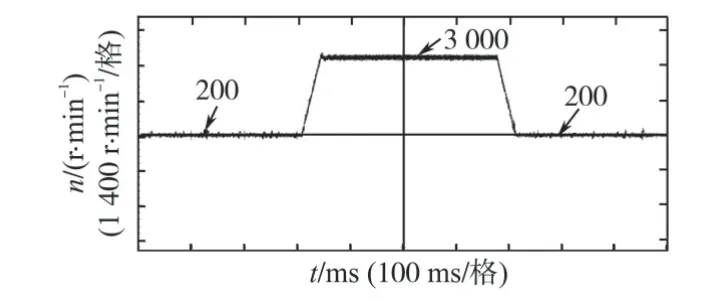
图7 转速动态响应情况Fig.7 Speed dynamic response
从实验结果可见,转速超调小,动态响应快速,具有较好的转速跟踪效果。
4.3 带载实验
为进一步验证该系统的带载能力,在MAGTROL HD-715-8NA-0100 型磁滞测功机加载平台上进行了带载实验[8]。
电机运行在1000r/min,1500r/min,3000r/min,额定负载为2.39 N·m情况下分别进行了测试,实验结果如图8所示。
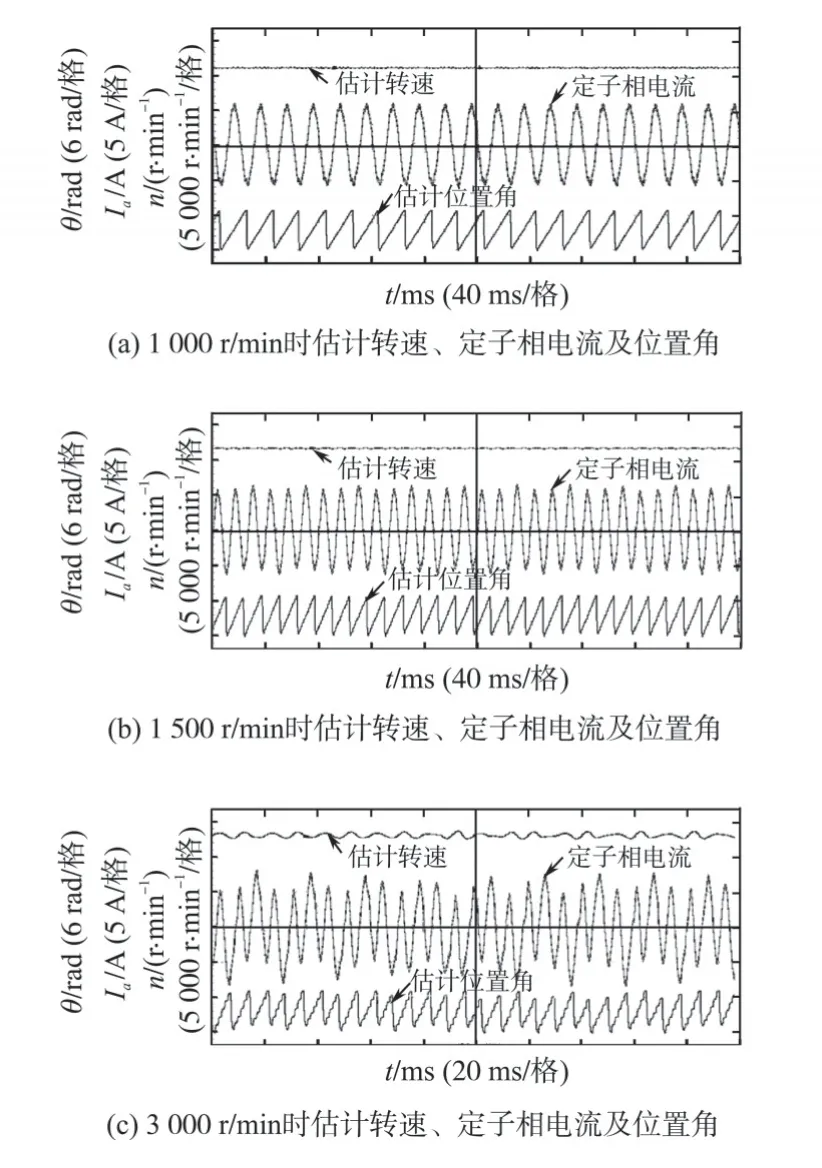
图8 2.39 N·m额定负载实验结果Fig.8 Experimental results with 2.39 N·m rated load
从实验结果可见:1)系统在中高速段效果较好,定子相电流正弦度好、转矩脉动较小、转速稳定、转子位置准确;2)系统在高速段能够正常运行,但出现了一定的震荡现象,仍有待解决。
5 结论
本文针对表贴式永磁同步电机无位置传感器矢量控制系统,采用了一种新型PLL反电动势观测器方法进行转子速度/位置估计,首先进行了详细的理论分析及推导,并在原有理论基础上根据实验现象对估算方法进行了一定的改进。通过实验研究得出以下结论:
1)由于零速及较低速度下电机反电动势非常小,因此除上述情况以外基于反电动势观测,锁相环的无位置传感器估计算法能够准确、快速地获取转子位置角及转速信息;
2)动态响应实验及加载实验表明该系统超调小、动态性能良好,具有较好的带载能力;
3)最后,基于反电动势观测,锁相环的SPMSM无位置传感器矢量控制系统结构简单可靠,在许多场合具有较好的可行性、实用性。
[1]Fabio Genduso,Rosario Miceli.Back-EMF Sensorless Control Algorithm for High Dynamics Performances PMSM[J].IEEE Trans.on Industrial Electronics,2010,57(6):2092-2100.
[2]El Murr,Giaouris G,Finch D,et al.PLL Strategy for Sensorless Speed and Position Estimation of PMSM[C]//Industrial and Information Systems(ICIIS)2008,Region 10 and the Third international Conference on IEEE,2008:1-6.
[3]王高林,张国强,贵献国,等.永磁同步电机无位置传感器混合控制策略[J].中国电机工程学报,2012,32(24):103-109.
[4]Sul Seung-Ki.Control of Electric Machine Drive Systems[M].NewYork:IEEE Press,2011.
[5]童力,邹旭东,丰树帅,等.基于预测无差拍算法的永磁同步发电机无传感器控制[J].电工技术学报,2013,28(3):17-25.
[6]周扬忠,林启星,马俊亭.凸极式永磁无刷直流电机无位置传感器型瞬时转矩观测[J].中国电机工程学报,2013,33(18):87-95.
[7]Anton Dianov,Nam Su Kim,Seung Moo Lim.Sensorless Starting of Horizontal Axis Washing Machines with Direct Drive[C]//Electrical Machines and Systems(ICEMS),2013 International Conference on IEEE,2013:1-6.
[8]王宏佳,杨明,牛里,等.永磁交流伺服系统电流环带宽扩展研究[J].中国电机工程学报,2010,30(12):56-62.