基于平方根容积信息滤波的弹道目标跟踪算法
2015-06-23刘俊,刘瑜,熊伟,孙顺
刘 俊,刘 瑜,熊 伟,孙 顺
(海军航空工程学院信息融合研究所,烟台 264001)
工程与应用
基于平方根容积信息滤波的弹道目标跟踪算法
刘 俊,刘 瑜,熊 伟,孙 顺
(海军航空工程学院信息融合研究所,烟台 264001)
针对再入弹道目标跟踪问题,提出了一种基于平方根容积信息滤波的多传感器融合估计算法(SCIF)。SCIF通过在扩展信息滤波(EIF)框架中嵌入平方根容积卡尔曼滤波算法(SCKF)实现状态滤波。仿真结果表明:所提出的算法不仅避免了EIF由于模型线性化误差易导致滤波发散的问题,且克服了不敏信息滤波(UIF)在高维滤波中数值不稳定的缺点,算法的滤波精度较高,能够更加有效地解决弹道目标跟踪中的强非线性滤波问题。
非线性系统;多传感器融合;扩展信息滤波;不敏信息滤波;平方根容积信息滤波
0 引 言
再入弹道目标由于受空气阻力等外部环境的影响,其状态与量测方程都是高度非线性的,因此弹道系数未知的再入弹道目标跟踪问题是一个比较复杂的非线性滤波问题,并且此问题对导弹防御具有重要的意义。
粒子滤波(Particle filter,PF)是一种典型的全局近似滤波算法[1,2],该算法通过序贯重点抽样方法得到后验概率带有权重的样本点,经过迭代计算实现对状态的全局估计。该算法在粒子数量充足时可对后验概率分布进行准确的估计,若粒子数量有限,其估计性能下降甚至发散。此外,粒子滤波算法不需要作高斯假设,可用于非线性非高斯状态滤波,但是实现有效的估计需要进行大量的计算,难以应用到实际系统中。因此,有必要设计计算效率更加高效的高斯近似算法。
扩展卡尔曼滤波(Extended Kalman filter,EKF)算法在工程中的应用较为广泛[3],其基本原理是对状态和量测方程进行线性化处理后使用KF滤波算法。类似于EKF,有扩展信息滤波器(Extended in-formation filter,EIF),EIF通过传递信息向量和信息矩阵实现状态滤波。与EKF相比,信息滤波器的初始化更加容易,计算量更小,并且易于扩展到多传感器融合[4,5]。但是,EKF和EIF只适用于弱非线性系统,并且还需要计算非线性函数的雅克比矩阵,限制了系统的模型,同时增加了计算的难度。对于高度非线性问题,由于EKF在线性化处理过程中忽略了高阶项,滤波精度下降,甚至会造成滤波发散。不敏卡尔曼滤波[6-8](Unscented Kalman filter,UKF)是一种确定性采样算法,通过选择特定的Sigma点经过非线性函数传递捕获状态的均值与协方差对后验概率进行近似,能够以至少二阶泰勒精度逼近非线性方程,滤波精度高于EKF算法,并且鲁棒性更强[9,10]。文献[11]将不敏变换(Unscented transform,UT)嵌入EIF结构内,提出了不敏信息滤波器(Unscented information filter,UIF)。
但是,UIF算法的性能受参数取值的影响较大,其尺度参数κ=3-n,当状态的维数大于3时,尺度参数κ<0,可能会出现滤波性能不佳甚至滤波发散的情况,所以UIF适用于解决维数较低的状态滤波问题[12-13]。为了克服 UIF滤波存在的缺点,Arasaratnam等同样从概率近似的角度基于球面径向规则提出了容积信息滤波(Cubature information filter,CIF)算法[12]。CIF利用一组等权值的容积点逼近状态的后验概率密度,能够获得较高的估计精度。CIF具有UIF的优点,且不需要调节参数,容积点及其权值仅由状态的维数唯一确定,可以提前计算与存储。此外,其估计精度与滤波稳定性都优于UIF,特别是在高维滤波时,这种优势更加明显。但同UIF算法一样,CIF算法在滤波过程中必须保持误差协方差矩阵的正定性与对称性,否则无法实现状态估计。考虑利用CIF的平方根形式,不仅可以保持误差协方差矩阵的正定与对称性质,还可以提高算法的数值稳定性。
针对再入弹道目标跟踪问题,基于扩展信息滤波框架,通过嵌入平方根容积信息滤波算法,提出了一种基于平方根容积信息滤波的弹道目标跟踪算法。该算法中每个传感器节点通过平方根容积信息滤波更新本地信息向量与信息矩阵的平方根因子,然后各节点将自己的量测贡献传递给融合中心,通过多传感器融合实现对目标的精确跟踪。
1 信息滤波器
扩展信息滤波器(EIF)是扩展卡尔曼滤波(EKF)的一种代数等价形式,EKF通过传递状态与估计协方差实现状态滤波,而EIF则通过传递信息向量与信息矩阵(估计协方差的逆)进行状态估计。
考虑如下离散时间非线性动态模型

给定观测信息Zk= {z1,z2,…,zk}后,状态的一步预测可表示为
状态更新可表示为

对于式(1)、(2)表示的非线性系统,扩展信息滤波器(EIF)是EKF的信息表示形式。定义Fisher信息向量和信息矩阵Yk|k为

根据EKF的递推过程,得到EIF中信息向量和信息矩阵的更新方程为
式中:ik+1为信息向量贡献;Ik+1为其关联的信息矩阵贡献

式中:Hk+1为非线性量测函数h的雅克比矩阵



式中:Fk为非线性状态函数的雅克比矩阵

完成信息滤波后,可以通过下式恢复状态向量估计值和估计误差协方差矩阵

2 平方根容积信息滤波算法
信息滤波在每次迭代中,都需要保持信息矩阵的正定性与对称性。但是由于计算机字长受限、数值误差等因素的影响,容积信息滤波中的信息矩阵可能会失去正定性与对称性,并且数值误差积累可能导致信息滤波器发散或无法工作。此外,容积信息滤波涉及到一些数值敏感运算,如矩阵求平方根、矩阵求逆等,这些运算可能会破坏信息矩阵的基本性质,从而影响滤波器性能。考虑利用容积卡尔曼滤波的平方根形式,可以保证信息矩阵的正定与对称性质,还可以提高算法的数值稳定性。此外,SCIF虽然传递信息矩阵的平方根形式,但计算量与CIF相同,并且具有CIF的优点。SCIF是SCKF的信息表示形式,二者有许多相似之处,SCIF的部分计算可以直接借用SCKF算法。与SCKF相似,SCIF算法也分两步进行状态更新,即时间更新与量测更新。
Step 1:时间更新
SCIF算法的时间更新过程可以分3步进行,具体过程如下:
(1)信息空间向状态空间转换
信息矩阵的分解

对式(7)两端求逆,得到

将协方差矩阵、信息矩阵的平方根形式分别代入式(20)两端,得到

所以

对应的状态为

(2)状态与协方差一步预测计算当前状态的容积点


计算容积点经非线性函数传递的预测值

利用容积点及其权重作加权计算,估计状态的预测值

估计预测误差协方差矩阵的平方根因子

此外,算法S=Tria(A)表示对AT进行QR分解,得到上三角矩阵R,令S=RT,得到的S是一个下三角矩阵。
(3)状态空间向信息空间转换
此过程与信息空间向状态空间转换过程相反,具体运算过程参照步骤(1)。此处不再赘述,直接给出转换结果。

Step 2:量测更新
EIF信息更新公式是基于线性化量测方程得到的,由于SCKF算法不需要对量测方程作线性化处理,因而无法得到线性化雅克比矩阵Hk+1。但是,根据线性统计误差传播性质,可以将SCKF的更新过程嵌入到EIF框架中,得到信息贡献向量与信息贡献矩阵分别表示为[13,14]
在进行量测更新之前,先计算量测的一步预测及互协方差,具体过程如下:
计算更新状态容积点

计算经非线性量测函数传递后的容积点

计算量测的一步预测

计算互协方差

式中:

所以,式(39)可以改写为

式中:

因此,信息矩阵更新

即更新后的信息矩阵的平方根因子

由于一步预测协方差Pk+1|k是对称阵,式(14)可以改写为

将式(44)带入式(31),得到信息贡献向量
对应的信息向量更新值为

至此,完成一次滤波迭代。
3 多传感器融合容积信息滤波
平方根容积信息滤波器很容易推广到多传感器融合估计,设N个传感器观测同一个目标,每个传感器的量测方程为

设量测噪声为高斯白噪声,并且各传感器量测噪声序列互不相关。利用伪量测矩阵计算各传感器的信息贡献,每个局部传感器s的信息贡献可以表示为
由于每个传感器的观测噪声是互不相关的高斯包噪声,多传感器融合估计更新公式中的信息贡献项可以表示为各局部传感器信息贡献项的和,即多传感器融合容积信息滤波器更新方程为
因此,多传感器更新后的信息矩阵的平方根因子为

由此得到的多传感器信息滤波器是一种带有融合中心的分散式滤波器,每个传感器节点将自己的信息向量贡献is,k+1和关联的信息矩阵贡献Is,k+1传递给融合中心进行信息融合状态估计,并为下一时刻的状态滤波做准备。
4 仿真验证与结果分析
4.1 仿真设置
考虑再入弹道目标跟踪问题,状态向量x∈R5×1包含位置(x1,x2),速度(x3,x4)和空气动力特性参数x5,目标的状态方程可以表示为:
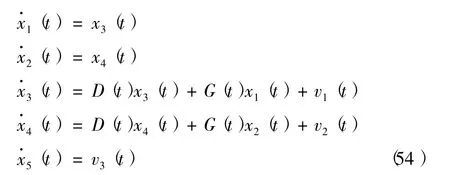
式中:

式中:
过程噪声w(t)= [v1(t),v2(t),v3(t)]T为零均值高斯白噪声。
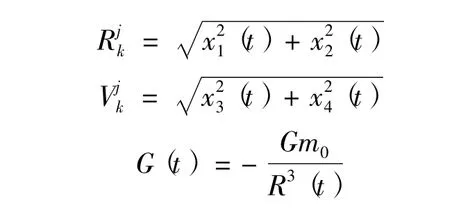
考虑用2部雷达对目标的运动进行观测,雷达的位置为(xm,s,ym,s),每个雷达的观测值包括距离和方位角。每个传感器的量测方程为
式中:vk,s=[q1,s,q2,s]T表示量测噪声向量。
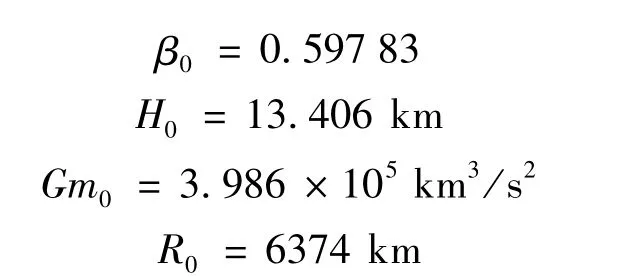
设定蒙特卡洛仿真次数为20次,仿真步数设置为200步,采样间隔T=1s。目标的真实初始状态为,x0=[6 500.4 km,349.14 km,-1.809 3 km/s, -67 967 km/s,0.693 2s-1]T,状态初值为=[6 500.4 km,349.14 km,-1.809 3 km/s,-67 967 km/s,0.693 2s-1]T。误差协方差矩阵初值为P0|0=diag([10-6km2,10-6km2,10-6km2/s2,10-6km2/s2,1s-2]),过程噪声协方差矩阵为 Q(t)=diag([2.406 4 km2,2.406 4km2,10-6s-2])。雷达位置为(xm,1,ym1)=(6 374 km,0.0 km),(xm,2,ym2)=(6 375 km,0.0 km),每个传感器的量测噪声协方差分别为

为了比较多传感器融合非线性状态估计算法的滤波性能,各算法的估计精度采用均方根误差(Root Mean Square Error,RMSE)进行评价。定义位置的均方根误差为

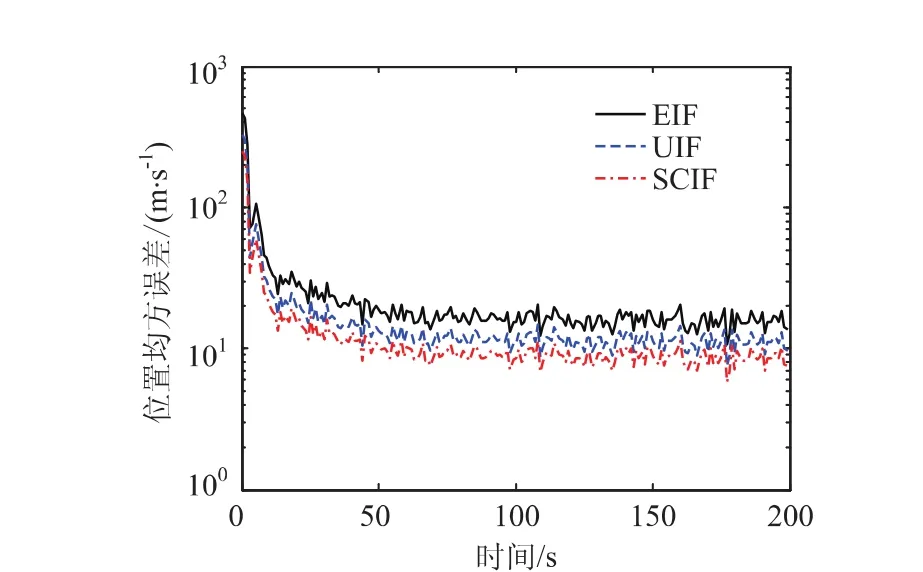
图1 多传感器融合位置估计均方误差
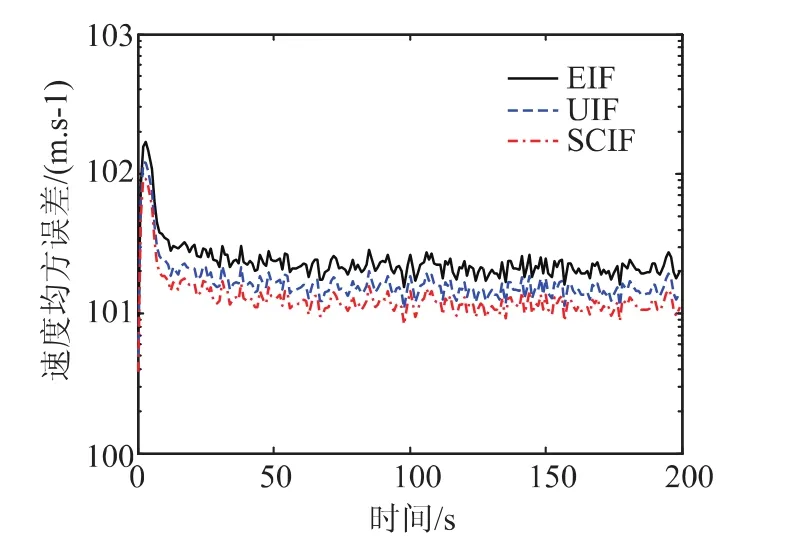
图2 多传感器融合速度估计均方误差
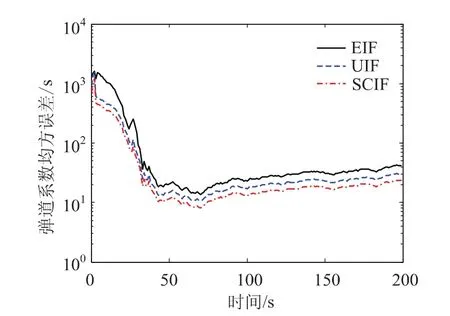
图3 多传感器融合弹道系数估计均方误差
4.2 仿真结果及分析
由图1、图2和图3可知,EIF的滤波效果较差,这是由于EIF在滤波过程中对非线性状态和量测方程进行了线性化近似处理,忽略了高阶项对滤波性能的影响,不可避免地引入了线性化误差,并且本文所设置的仿真场景具有强非线性,线性化误差对状态估计结果影响较大,造成滤波性能不佳。UIF和SCIF滤波效果较好,而SCIF算法滤波精度比UIF略优,且在仿真中更加稳定。这是由于UIF和SCIF是通过确定性采样方法对目标状态进行估计,其估计精度高于一阶泰勒展开,并且SCIF不需要像UIF那样调节参数才能获取良好的状态估计结果,容积点及其权值的选取只与目标状态的维数有关,可以提前计算确定,并且采用平方根滤波形式,避免了矩阵求平方根等数值敏感运算,保证了误差协方差矩阵的正定与对称性质,数值稳定定更优。
5 结 语
本文研究了再入弹道目标跟踪问题,基于扩展信息滤波器框架,提出了一种基于平方根容积信息滤波的多传感器融合估计算法。仿真结果表明:与EIF、UIF算法相比,SCIF算法状态估计精度较高,滤波稳定性也较好,为弹道目标跟踪等强非线性系统状态估计与融合提供了一种可行的解决方法。
[1] CappéO,Godsill S J,Moulines E.An overview of existing methods and recent advances in sequential Monte Carlo[J].Proc.IEEE,2007,95(5):899-924.
[2] 程水英,张剑云.粒子滤波评述[J].宇航学报,2008,29(4):1099-1111.
[3] Julier S J,Uhlmann J K.A new approach for filtering nonlinear system[C].Proc of the 1995 American Control Conf.Seattle:IEEE,1995:1628-1632.
[4] B D O Anderson and JB.Moore.Opticals filters[M]. Englewood Cliffs,NJ:Prentice-Hall,1979.
[5] A G O Mutambara.Decentralized estimation and control for multi-sensor Systems[M]. Boca Raton:CRC Press,1998.
[6] S J Julier,JK Uhlmann.Unscented filtering and nonlinear estimation[J].Proc.IEEE,2004,92(3):401-422.
[7] O.Grothe.A higher order correlation unscented kalman filter[J].J.Appl.Math.Comp.,2013,219(17):9033-9042.
[8] JDunik,M Simandl,O Straka.Unscented kalman filter:aspects and adaptive setting of scaling parameter[J]. IEEE Trans. Autom. Control, 2012, 57(9):2411-2416.
[9] Gustafsson F,Hendeby G.Some relations between extended and unscented Kalman filters[J].IEEE Transactions on Signal Processing,2012,60(2):545-555.
[10]Garcia-Fernandez A F,Morelande M R,et al.Truncated unscented Kalman filtering[J].IEEE Transactions on Signal Processing,2012,60(7):3372-3386.
[11]Lee D J.Nonlinear estimation and multiple sensor fusion using unscented information filtering[J].IEEE Signal Processing Letters,2008,15(1):861-864.
[12]Arasaratnam I,Haykin S.Cubature Kalman filters[J]. IEEE Trans on Automatic Control,2009,54(6):1254-1269.
[13]T Vercauteren,XWang.Decentralized sigma-point information filters for target tracking in collaborative sensor networks[J].IEEE Transactions on Signal Processing,2005,53(8):2997-3009.
[14]Y Kim,J Lee,H Do,et al.Unscented information filteringmethod for reducingmultiple sensor registration error[J].IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems,2008:326-331.

刘 俊(1990—),男,湖北随州人,博士研究生,主要研究方向为目标跟踪、状态估计;
E-mail:18615042187@163.com
刘 瑜(1986—),男,湖南邵东人,博士,主要研究方向为无线传感器网络、目标跟踪;
熊 伟(1977—),男,江西南昌人,教授,主要研究方向为信息融合、目标跟踪;
孙 顺(1991—),男,江苏铜山人,硕士研究生,主要研究方向为目标识别、目标跟踪。
Tracking Ballistic Target Based on Square-root Cubature Information Filter
LIU Jun,LIU Yu,XIONGWei,SUN Shun
(Research Institute of Information Fusion,Naval Aeronautical and Astronautical University,Yantai264001,China)
Considering the problem of tracking ballistic re-entry target,a new square-root cubature information filtering(SCIF)algorithm for state estimation andmulti-sensor information fusion is proposed.The proposed information fusion algorithm is derived by embedding square-root cubature Kalman filter into the extended information filtering(EIF)architecture.Simulation results show that the proposed algorithm is more effective than the algorithm based on unscented Kalman filter in the aspects of estimation accuracy and filtering stability.
Nonlinear system;Multi-sensor fusion;Extended information filter;Unscented information filter;Square-root Cubature information filter
TP953;TN957
A
1673-5692(2015)05-527-06
10.3969/j.issn.1673-5692.2015.05.014
2015-07-13
2015-09-24
国家自然科学基金(61471383)
