无参考点Link16信号定位方法研究
2015-06-23蒋春山邵国峰
蒋春山,邵国峰
(中国电子科技集团公司第36研究所,嘉兴 314000)
工程与应用
无参考点Link16信号定位方法研究
蒋春山,邵国峰
(中国电子科技集团公司第36研究所,嘉兴 314000)
JTIDS系统的Link16信号工作在正交跳频状态,单个侦察站根据接收到的脉冲信号相互间的时间差,就可以描绘出网内用户的相对航迹。如果网内有一个点的位置已知,即参考点,其它所有点的位置都可以确定,这种有参考点的Link16信号单站定位方法,在不同作战环境中其可用性与能否找到参考点直接相关。研究提出一种测量相对时差和相对电平相联合的无参考点单站定位新方法,可以在不同的作战环境中实现对Link16信号的单站定位,以满足实战需求。
参考点;相对时间;相对电平;单站定位
0 引 言
联合战术信息分发系统(JTIDS)是为适应美军联合作战,而由美三军统一研制的综合通信、导航、识别系统,是一种大容量、保密、抗干扰、时分多址的信息分发系统。这个系统在时、频域上有显著的特点[1-2]。
时域上,JTIDS采用时分多址(TDMA)工作方式,一个时隙为1/128 s或7.8125 ms。如图1所示,每个时隙发射一组(258个或者444个)脉冲信号,脉冲宽度为6.4μs,脉冲周期为13μs。在每个时元中给每个JTIDS系统的成员分配一定数量的时隙,每个系统成员均备有准确的时钟,而且与时间基准成员的时钟同步,形成统一的时间系统。
频域上,JTIDS采用了跳频技术,如图2所示,跳频在各脉冲之间进行,跳频点以3 MHz间隔均匀分布,共51个频点,跳频周期为13微秒。载频从969~1 008 MHz(13个跳频点)、1 053~1 065 MHz(5个跳频点)和1 113~1 206 MHz(33个跳频点)
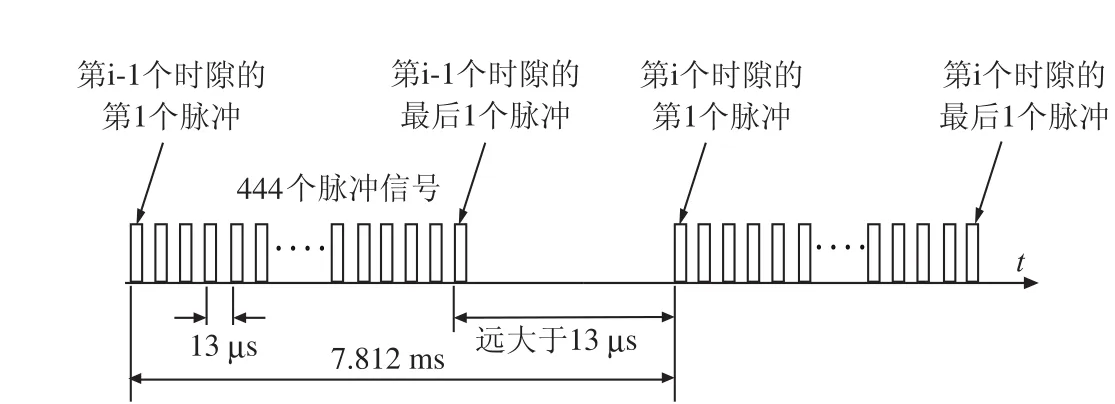
图1 LINK 16脉冲时域特征
三个子频段均匀选取跳频点,脉间跳频间隔30 MHz以上[3-4]。
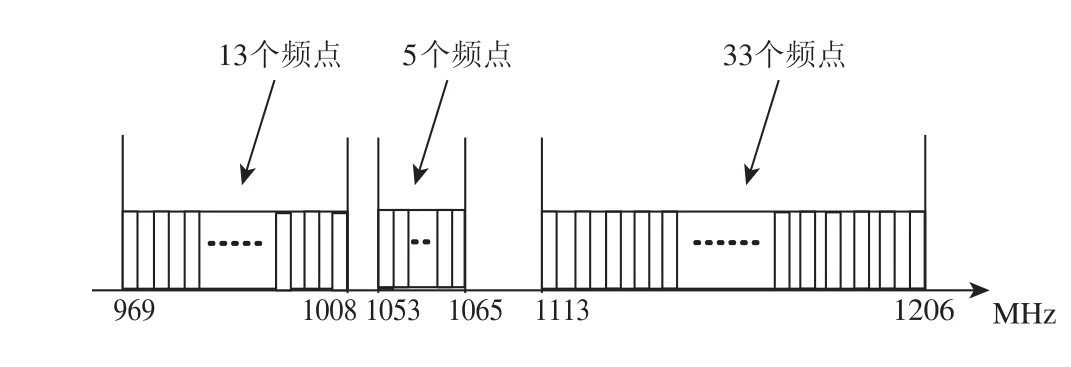
图2 跳频点分布示意图
JTIDS系统的核心是Link16链路,利用用户时分、跳频、有时间基准的工作特征,通过对Link16链路信号的侦察、定位,就可以掌控整个区域的目标态势。近些年来人们提出了各种有效的Link16定位方法,主要采用基于单站多点或多站测向交叉法(AOA)、时差定位法(TDOA)及测向测时差定位法(AOA/TDOA)三种基本体制。
如图3所示,多站交叉定位主要采用测向交叉法,其定位精度主要取决于测向误差,测向误差越大,定位精度就越差。文献[5]介绍了多站测向交叉定位解析算法原理,推导了基于最小二乘算法的交叉定位模型,并对现有算法误差进行仿真分析。
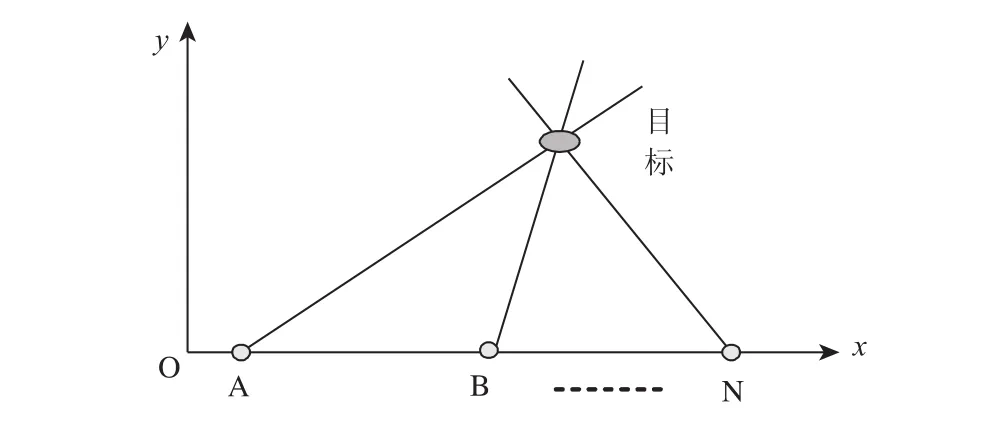
图3 多站交叉定位原理示意图
测向交叉、时差等定位方法需要多站联合,只能对多站共视区目标才能定位;需要通过两个或更多个测量站采集到的辐射源信号到达时间差及辐射源信号入射线的方位角来进行定位[5]。定位原理如图4所示,通常情况下,测向测时差系统由主站和从站联合构成,主站设置定位侦察设备,既测定辐射源信号的到达时间差,又测定辐射源信号入射线相对定位基线的方位角。文献[6]采用测向测时差定位方法,为JTIDS端机在实际工作中如何选择定位源提供理论依据。
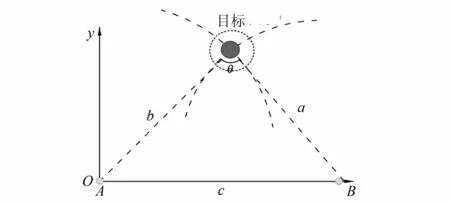
图4 测向测时差定位原理示意图
根据现有技术及工程经验,单站多点定位方法,只有在高速运动平台才能实现,即通过飞行拉长等效基线实现,对同样的空中高速运动目标的定位效果较差;有参考点单站定位方法,可以根据已知参考点的位置值、测向值、相对时间差值,实现对目标进行快速定位,对任何运动、静止目标都可以定位,且所见即定位,但参考点必须是Link16系统中的一个用户,其应用效能直接受参考点选择的影响,实战环境可应用性较差。为此,本文提出一种无参考点Link16信号定位方法,即利用相对时间测量和相对电平测量联合的方法,可以有效解决无参考点定位问题。
1 无参考点单站定位模型及方法
定位的重点目标是空中飞机,假设以其中一架飞机为目标进行研究。系统建模如图5所示,侦收站位于图5的O处,X、Y轴组成的二维空间,目标航迹A1、A2、A3、…… An,飞机发射功率为P,其中:
测试点A1,功率p1,角度α1,频率传输损耗分量k1;
测试点A2,功率p2,角度α2,频率传输损耗分量k2;
OA1=OA1ˊ;
…………
如上文所述,LINK16信号有51个频率可以用于发送数据,在一个时隙内,频率不是固定不变的,而是按照每秒76923跳的跳速快速变化,采用均匀跳频方式(在每个时隙的发射段内伪随机均匀的选取51个频点中的任意一个)。按一个时隙内444个脉冲信号,每个脉冲信号在51个频点中按概率均匀分布伪随机选取,一个时隙中取相同频点的个数至少为8个,1 s时间内LINK16信号在相同跳频点的次数至少为1024个,因此,在一定时间内完全可以侦收到跳频频率相同的两个点。按以上分析,对LINK16信号定位可以在一定时间内侦收多帧信号,由于电平测量与发射设备传输链路损耗有关,而链路损耗是频率的函数,可以根据获取的LINK16信号中跳频频率相同的脉冲信号作为测量电平时链路传播损耗的载频,由此可知k1=k2,所以接收端电平测量如下:
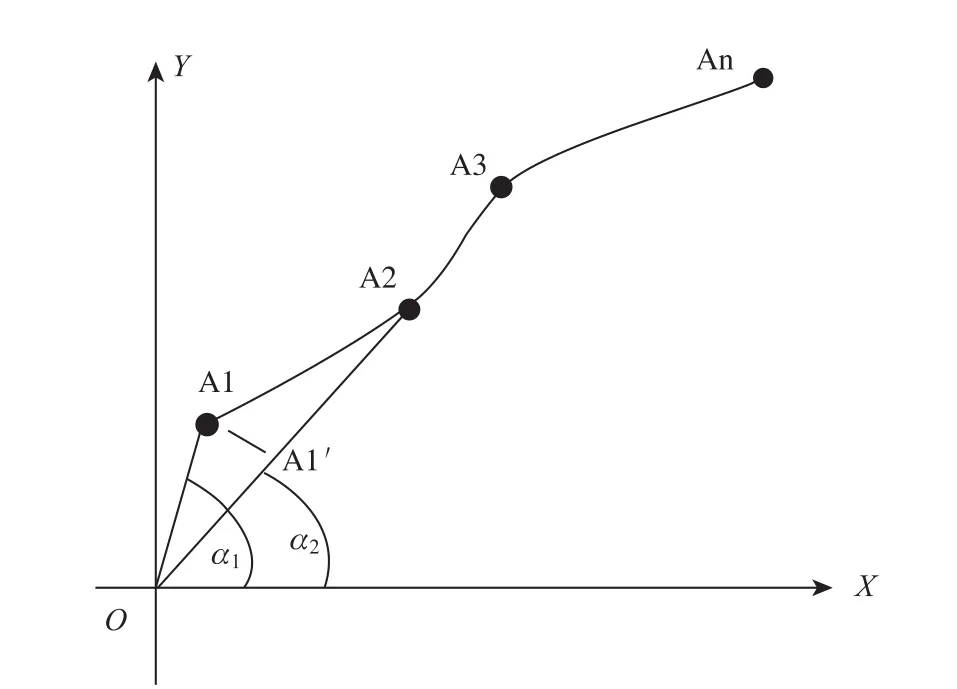
图5 Link16单站定位参考模型
1.1 测量相对电平

(k1对某一频点为可计算值,与频率有关,由链路损耗公式确定)

(k2对某一频点为可计算值,与频率有关,由链路损耗公式确定)
ΔP12为相对电平测量值。
1.2 测量信号传播相对时间差
测量目标终端在测试点A1和测试点A2时发射Link16信号,接收端测得两测量点的信号传播相对时间差为Δt。
如图5所示,ΔL12=OA2-OA1ˊ,OA1=OA1ˊ,即为

ΔL12为相对时间测量得到的相对距离差值(具体指相对侦收站同向距离差),ΔL12=Δt*c,c为电磁波在空中传播速度。
联合(1)、(2)式可计算OA1、OA2,也就是测量点到目标的距离,可得:

其中,m=10(ΔP12/20)。
根据(3)式,通过多频点测量取平均可以剔除奇异点及误差。根据相同原理,可以测量A1、A2、A3、……An所有点的距离,各点距离测量值只与相对电平测量差值ΔP12和相对距离测量差值ΔL12有关,而ΔL12与信号传播相对时间差有关,因此只要相对电平测量差值ΔP12和信号传播相对时间差Δt精度达到要求即可实现对link16信号定位。
1.3 测方位
在测量电平的同时采用干涉仪等方法,测量A1、A2点的方位α1、α2。
1.4 计算位置
根据OA2、OA1、α1、α2,可以计算A1、A2的位置,实现对目标定位。后续对每个测量目标取值点A3、……An都可进行实时定位计算。
2 定位误差仿真分析
2.1 误差因素分析
由上面分析可知,Link 16目标的无参考点单站定位误差由三个因素决定,分别是测向误差、相对时差测量值和相对电平测量值:

本文主要分析相对电平测量差值ΔP12决定的定位误差。
纵向误差可由下式表示:

由公式(3)和公式(4)可知,系统误差取决于OA1实际与OA1测量之差,OA1实际与ΔL12和ΔP12有关,而ΔL12与Δt有关,相对电平测量差值ΔP12与相对距离也有关,因此,为了定性分析测量电平误差对系统定位精度产生的影响,排除测向误差产生的横向定位误差和由时间测量误差产生的纵向定位误差的影响,本部分定性分析测量电平误差对系统定位精度产生的影响。
2.2 测量电平误差仿真分析
根据以上分析,分别就目标信号测量电平精度为0.01 dB、0.1 dB,两测量点的信号传播相对时间差Δt分别为30μs和60μs情况下进行仿真,分析测量电平误差对定位系统定位精度的影响。仿真结果通过多频点测量,剔除奇异点后取平均可以减少误差,X、Y为距离,曲线上的数字为定位精度,单位为km。
如图6所示,两测量点的相对传播时间差Δt为30μs的情况下,由仿真结果分析可知,接收电平误差0.01 dB时,OA1误差(纵向定位误差)在100 km为1.5 km(1.5%R)左右,且定位误差随定位距离的增加成增大趋势,300 km处为13 km(4%R)。
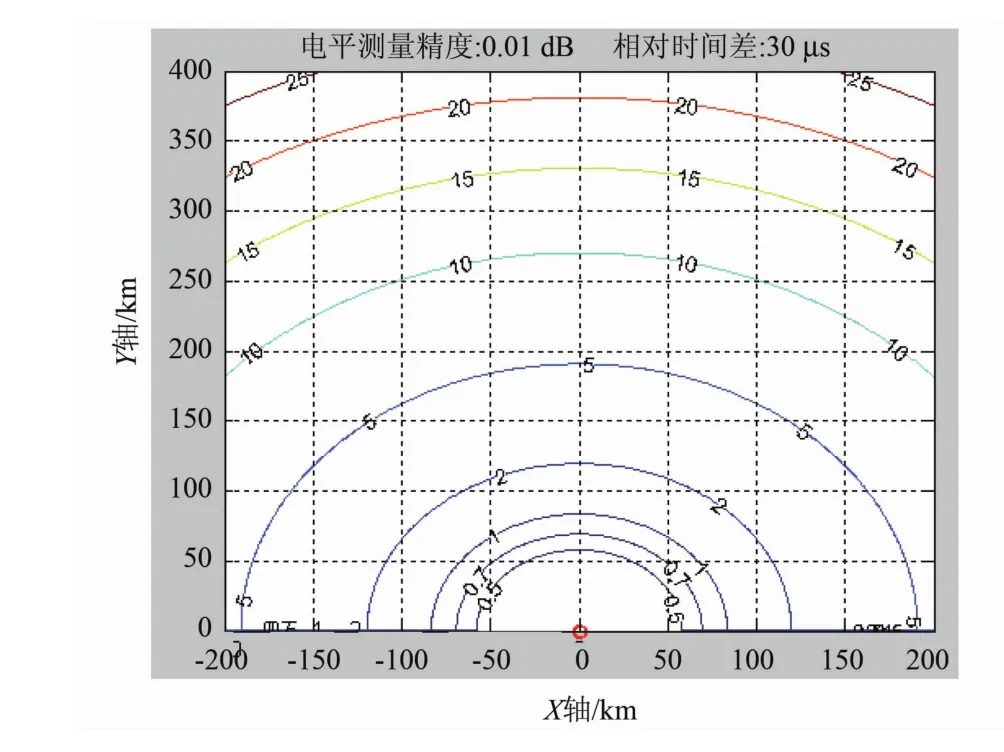
图6 时间差Δt为30μs、电平误差0.01 dB时的目标定位仿真结果
如图7所示,两测量点的信号相对传播时间差Δt为60μs的情况下,由仿真结果分析可知,接收电平误差0.01 dB时,OA1误差(纵向定位误差)在100 km为0.8 km(0.8%R),且定位误差随定位距离的增加成增大趋势,300 km处为7.5 km(2.5% R)。
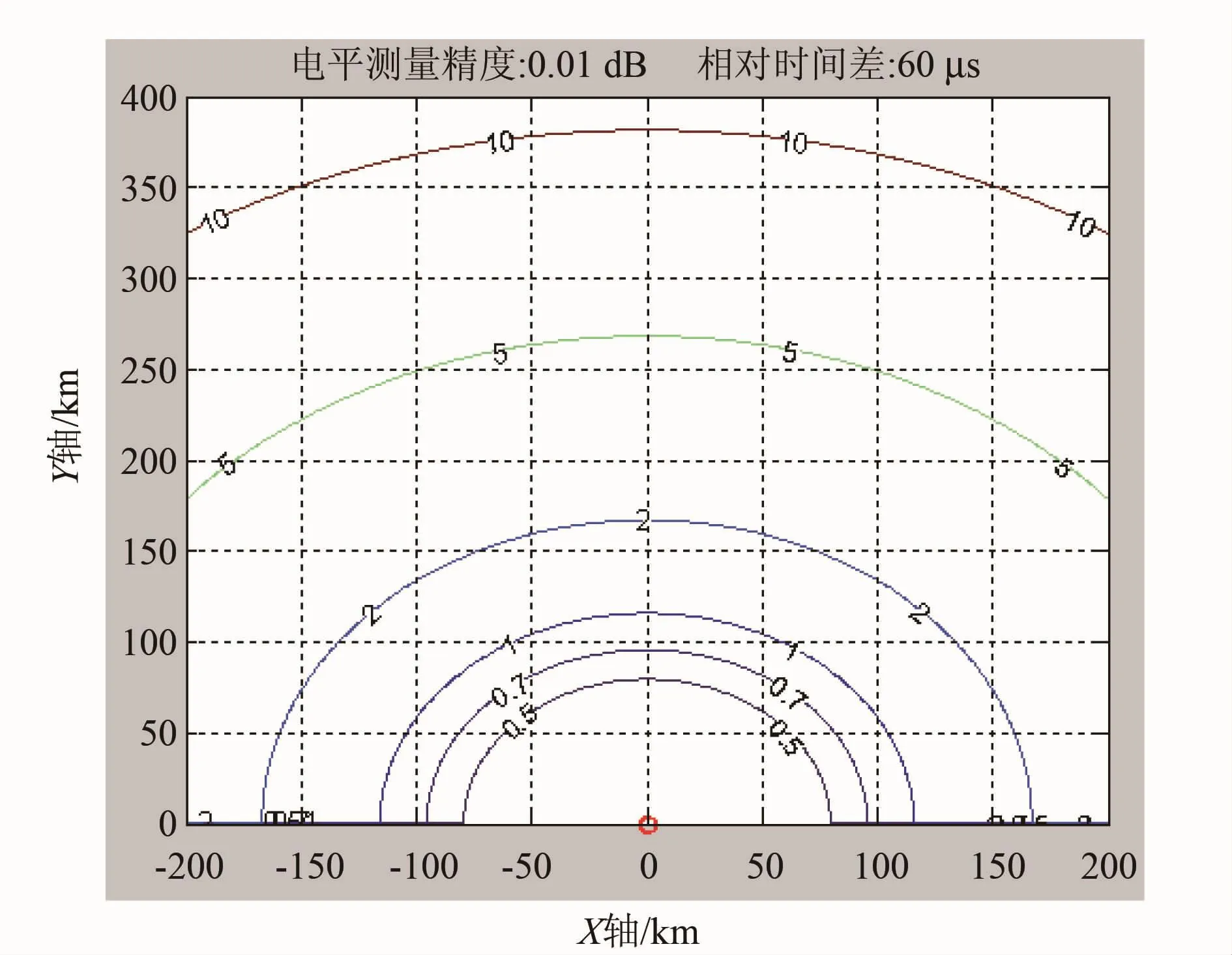
图7 时间差Δt为60μs、电平误差0.01 dB时的目标定位仿真结果
如图8所示,两测量点的信号相对传播时间差Δt为60μs的情况下,由仿真结果分析可知,接收电平误差0.1 dB时,OA1误差(纵向定位误差)在80 km为4.8 km(6%R),且定位误差随定位距离的增加成增大趋势,120 km处为10 km(8%R)。
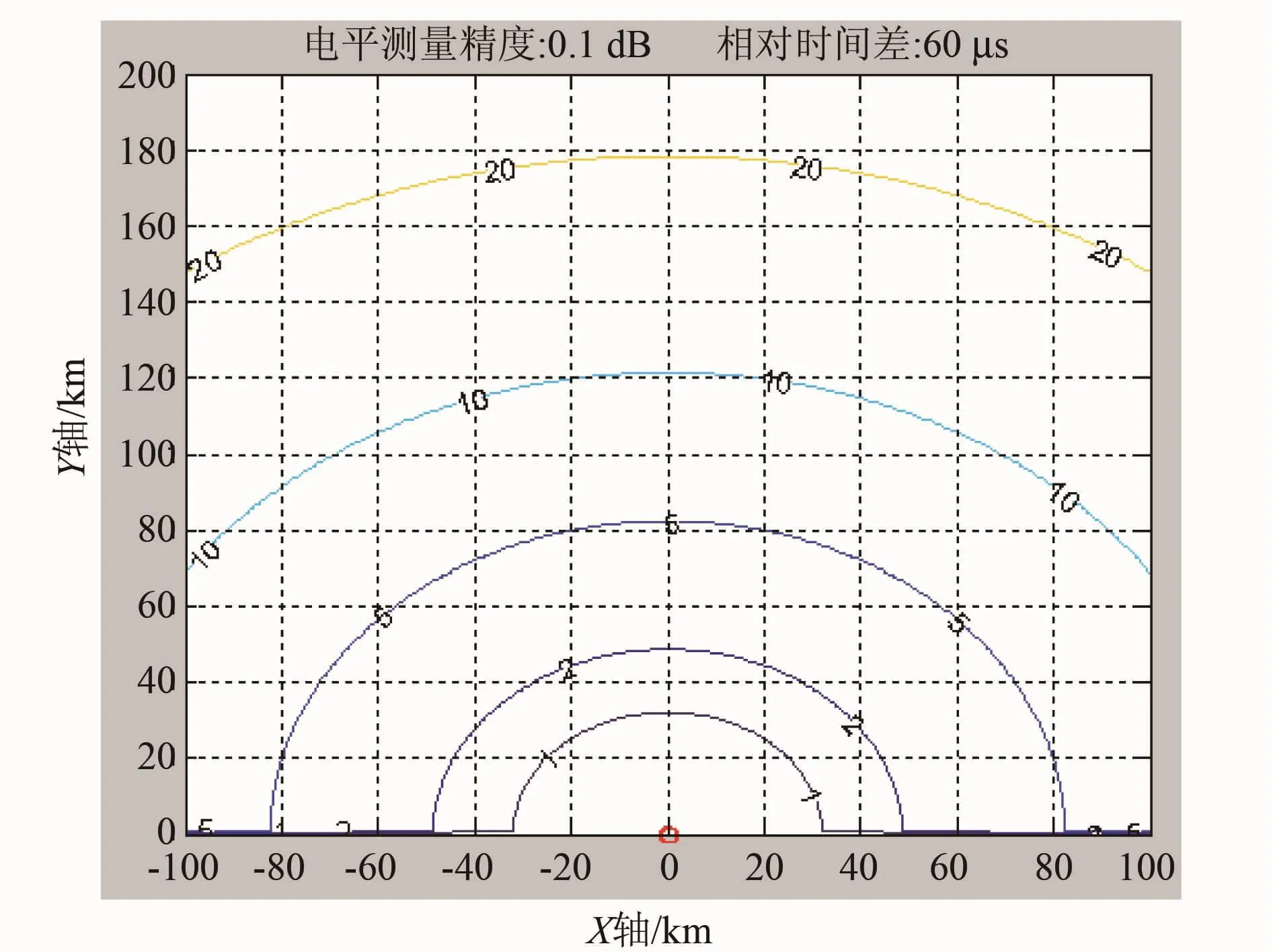
图8 时间差Δt为60μs、电平误差0.1 dB时的目标定位仿真结果
2.3 电平误差测量精度的可实现性分析
对于运动目标,假设运动速度2 400 km/h= 40 km/m=0.67m/ms,在间隔10ms的情况下,目标的移动距离为6.7m,可以认为姿态保持不变,测量的是相同的目标信号在不同瞬间的值,相对电平测量精度是A/D的量化精度,对于16BitA/D,量化精度为1/216,因此,可实现的精度相当高,为90 dB/(1/216)=0.001 dB,工程实现精度可取0.01 dB。实际应用时,每隔10ms测量一个点,测量前后两个点的相对电平值,再选取相对时间差大于60μs的点进行定位计算,剔除奇异点,其中的相对电平值通过逐点累积推算得到。
2.4 对Link16信号多用户定位可行性分析
前述定位方法是针对一个目标进行分析的,如果存在多个目标,只要多个目标是可以分离的,该定位方法同样适用,关键是多用户分离问题。通常Link16链的使用存在单网多用户和多网多用户情况,对多用户分离首先进行测向分离,对测向不能分离的需要进一步处理。测向精度0.5度对应300 km远处3δ横向距离约为7.5 km,同一方向可能有编队用户和非编队用户;编队用户,运动规律相同,幅度差相似,可以认为是一个用户;非编队用户,运动规律不同,幅度变化不同,通过分析可以区分开。
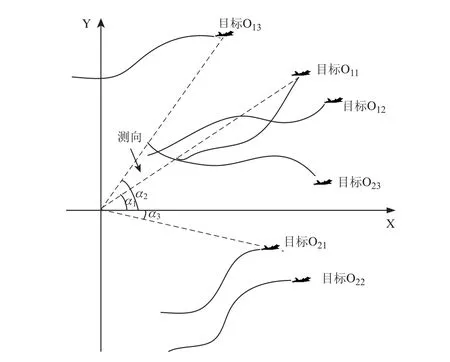
图9 多目标环境示意图
如图9所示,假设目标O11、O12、O13为LINK16跳频网1内用户单元,目标O21、O22、O23为LINK16跳频网2内用户单元,通过测向可以区分为三部分:O13,O11、O12、O23,O21、O22,其中O11、O12、O23及 O21、O22需要继续分离。O21、O22为同网,信号分时出现,根据同一目标相临两个测量点幅度变化量稳定的特点,做测量点匹配,如果测量点配错用户幅度变化就不稳定,据此可对用户进行分离。O11、O12、O23为两个网信号,不同网的O23信号与O11或O12同时出现,而O11和O12分时出现,先对O23进行测量点匹配做用户分离,再对O11、O12进行测量点匹配做用户分离。对于更多网、更多用户情况依次类推。多用户定位的基本原则是,先进行测向分离,再进行测量点匹配分离,剔除奇异点,对分离后用户进行定位计算。
2.5 综合讨论
综上所述,系统的相对电平、相对时间测量精度可实现值都很高,对定位精度影响较小。信号相对传播时间差Δt影响目标定位精度,相对传播时间差越大,定位精度越高;同时,由以上仿真分析可知,在相同相对电平测量精度和相同相对时间测量精度情况下,目标距离越远,定位精度越低。也就是说对横向移动目标的定位精度差,对纵向移动目标的定位精度高;当目标延圆周运动时,相对测量时间差值为0,相对电平测量值也为0,此时(3)式为不确定解,在当前一个测量点已经定位的情况下,可以根据测向结果确定目标在圆周上的相对位置。
3 结 语
本方法的优点是不用参考点,即可实现对多目标和单目标的定位,多目标情况下,需要在本文算法前进行脉冲配对及信号分选,获取信号参数进行相关匹配。目前,相对时间测量精度已经有一定工程基础,相对电平的测量精度要求比较高但可实现,因此,本文提供的定位方法可以为实现一个具有高实时性并能在实战条件下工作的单站对Link16信号定位系统提供技术基础。
[1] 梅文华,蔡善法.JTIDS/Link16数据链[M],国防工业出版社2007.
[2] 宋发兴,许俊奎,焦中科.Link-16(JTIDS终端)的TDMA体系结构分析[J].舰船电子工程,2008,(04).
[3] 曹乃森,孙亚伟.基于时分多址技术的Link16数据链应用研究[J].中国高校通信类院系学术研讨会,2009.
[4] 孙义明,杨丽萍.信息化战争中的战术数据链[M].北京邮电大学出版社.
[5] 黄剑伟.无源定位技术研究[D].西安:西安电子科技大学,2009:8-30.
[6] 胡来招.无源定位[M].北京:国防工业出版社,2000.

蒋春山(1963—),男,浙江兰溪人,硕士,研究员,主要研究方向为特种通信总体;
E-mail:jcs002@sohu.com
邵国峰(1985—),男,黑龙江哈尔滨人,硕士,助理工程师,主要研究方向为信号处理、特种通信总体。
Research on No Reference Position Localization M ethod of Link16 Signal
JIANG Chun-shan,SHAO Guo-feng
(The 36thResearch Institute of CETC,Jiaxing 314000,China)
When Link16 signal in Joint Tactical Information Distribution System(JTIDS)is performing in an orthogonal frequency hopping state,the relative track of target in the hopping network can be depictby single reconnaissance station
difference pulse signals of Link16 according to the time equation of pulse signals.If there is a known location(reference position)within the hopping network,other locations of targets can be tracked,the availability of this kind of single-station location method is directly related to a reference position in different operational environments.A new single-station location method that is related to the time equation and the relative levels of signal strength is presented.This kind of new method can achieve single-station location of Link16 signals in different environment,meeting the actual battlefield demand in all circumstances.
reference position;time equation;relative signal level;single-station location
TN911.7
A
1673-5692(2015)04-367-05
10.3969/j.issn.1673-5692.2015.04.007
2015-05-08
2015-07-12
