轮毂电机多轮独立驱动车辆机电联合制动控制策略
2015-06-23燕玉林廖自力刘春光李立宇
燕玉林,廖自力,刘春光,李立宇
(装甲兵工程学院,北京 100072)
轮毂电机多轮独立驱动车辆机电联合制动控制策略
燕玉林,廖自力,刘春光,李立宇
(装甲兵工程学院,北京 100072)
为了提高轮毂电机多轮独立驱动车辆的能量利用率,针对某型车辆的机电联合制动系统设计了一套模糊控制策略,用于分配制动力据,回收部分制动能量,并进行了Matlab离线仿真实验,实验结果表明,该控制策略可有效分配制动力矩,提高制动效能并回收能量。
机电联合制动,模糊控制,轮毂电机
0 引言
当车辆机械制动时,动能以摩擦的方式消耗,影响机械制动系统的使用寿命。轮毂电机驱动的车辆,动力由电气系统直接传递完成。在车辆制动时也可利用电机的制动特性,回收部分制动能量到动力电池和超级电容中,即再生制动。电机高速运转时,制动响应快,低速时制动稳定性较差、且能量回馈效率很低;机械制动在低速时效能稳定,高速时容易失效。因此,通过再生制动和机械制动的机电联合制动方案是一种较好的选择。
为实现车辆的制动安全性和高效制动能量回收,有必要对整车制动力进行合理分配,保证车辆制动性能的同时,提高能量回馈率[1]。本文以机电联合制动力分配为控制目标,以某型轮毂电机多轮独立驱动的电传动车辆为实例,研究了基于模糊控制的机电联合制动控制策略,并进行了建模仿真。
1 机电联合制动控制系统设计
车辆制动时,轮毂电机运行于再生制动模式,输出制动力矩实现车辆减速,产生的电能由超级电容和动力电池回收,电压泵升超过设定阈值时由制动电阻消耗。机械制动系统采用储能式电控液压中心站+盘式制动器结构。驻车制动采用常闭式液压解脱驻车方式。
从保证制动安全的角度考虑,采用制动控制器完成机械、电气制动力矩的分配,以及机械制动系统的直接控制,其优先级高于车辆中央控制器,可减少控制环节,提高系统可靠性。
联合制动系统主要包括线控指令机构(电子踏板)、制动控制器、电控液压蓄能站、机械摩擦制动器、轮毂电机制动单元、超级电容与动力电池并联储能装置、制动电阻等,系统结构如图1所示。

图1 机电联合制动系统结构
2 模糊逻辑控制策略实现
2.1 模糊控制策略分析
想要寻求好的制动控制策略,首先要明确车辆的制动目标。车辆的制动性能主要从制动距离、制动时间、制动减速度、制动器的热负荷等几个方面进行评价[2]。由于输入量包括踏板行程,车速,电池SOC等多个时变参数且系统有严重的非线性,本文采用模糊逻辑控制,使控制系统不再依赖精确的数学模型,保持较强的鲁棒性[3]。
车辆总的制动力矩等于机械液压制动力矩与再生制动力矩之和[4],为提高制动的可靠及安全性能,当车速低于10 km/h时,完全采用机械液压系统进行制动。车辆速度较高时,采用机电联合制动,为提高能量回收,首先使用电机再生制动,当前电机转速下提供的最大制动转矩不能满足总制动需求时,不足部分由机械制动补充,需求制动转矩小于当前电机转速下提供的最大制动转矩时,则直接调节电机转矩满足制动性能要求。

图2 能量最大回收制动力矩分配
根据图2,电机再生制动力矩与机械液压制动力矩之和等于总需求制动力矩:

式中,TC_ref为总需求制动力矩,TG_ref为需求电制动力矩,TM_ref为需求机械制动力,TC_max为最大制动力矩。

当需求制动转矩超出电机的最大制动转矩时,施加机械制动,机械制动力矩为:

由此可以设计,在车辆制动时,通过线控指令机构发送对制动力矩的总量需求,由模糊控制器结合车速、制动工况(踏板行程)、SOC信号,控制力矩分配以及机电联合制动工作方式:
①中轻度制动下减速工况采用联合制动,通过一定的控制策略合理分配轮毂电机、机械制动器两者的力矩大小和工作时机;
②停车工况和紧急制动工况以机械制动器为主;
③下缓坡等弱强度制动以轮毂电机发电回馈制动方式为主,必要时以机械制动器进行力矩补充。

图3 机电联合制动模糊控制策略
考虑到系统安全性,增加手动驻车应急备用工作方式。为使驾驶员在制动时具有与传统燃油车一样的平顺感,将制动踏板的信号解释为制动力矩,制动控制器根据工况和制动要求,控制机械制动系统和电机协同工作,以获得期望的总制动力矩。
2.2 模糊控制器设计
本文通过Matlab中的模糊逻辑工具箱搭建此控制器。输入分别是动力电池荷电状态(SOC),制动踏板角度(alpha),车速(carspeed),输出为电机制动力矩比例系数(K)。考虑到车辆实际的制动情况,变量alpha,carspeed和输出K分别包含5个模糊子集(‘verylow’‘low’‘middle’‘high’‘verhigh’),隶属度函数采用梯形覆盖,表达式为:

输入输出模糊量的模糊子集隶属度函数如图4所示。
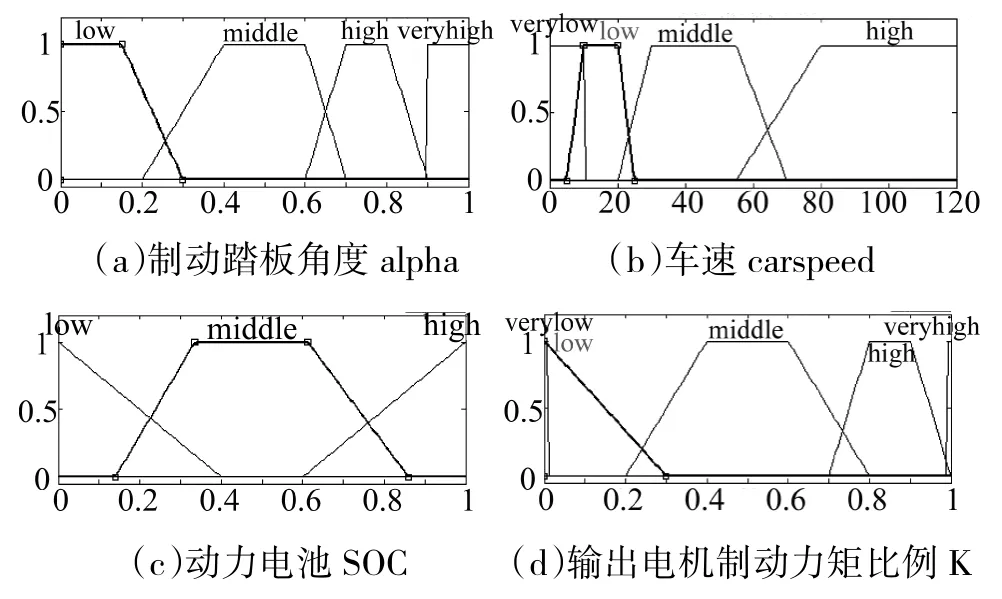
图4 输入输出变量的隶属度函数
根据机电联合制动控制策略,完成了模糊控制规则的编写,表1中列出了部分控制规则。推理方法采用Mamdani类型,and运算采用最小算子,清晰化方法采用质心法。
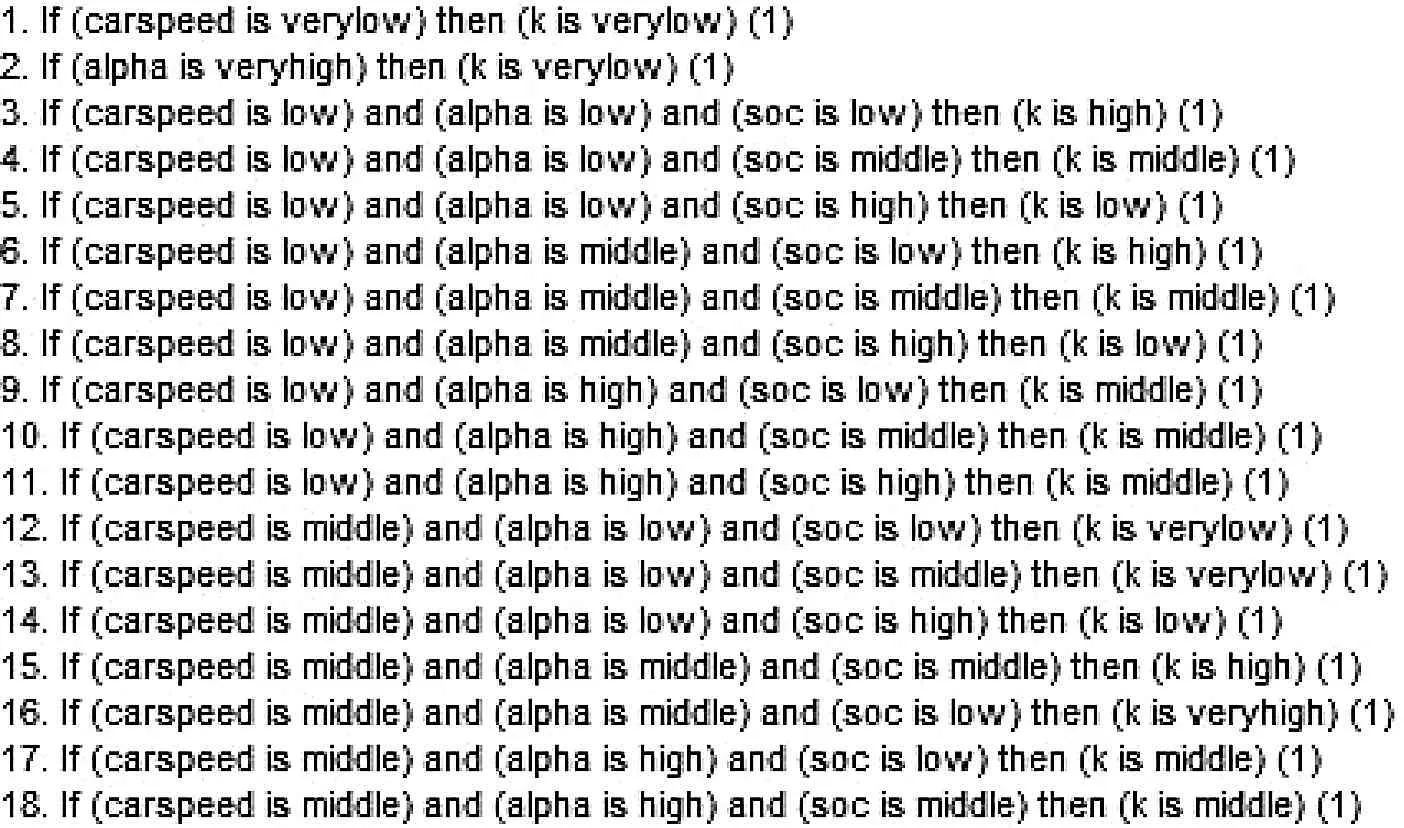
表1 部分模糊控制规则

图5 模糊规则输出
3 机电联合制动仿真建模
3.1 永磁同步电机建模
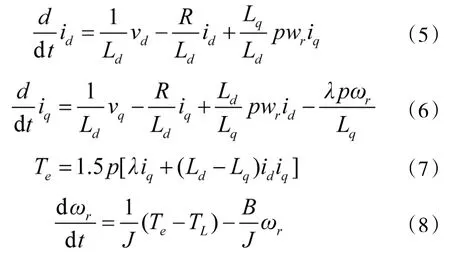
本文研究的轮毂电机采用永磁同步电机,搭建的理想状态模型使其在基速以下保持恒转矩,基速以上保持恒功率,有理想的驱动-制动特[4]。模型采用转自磁场定向d-q坐标系中的状态空间模型,表达式如下:
3.2 动力电池建模
动力电池挂接在母线上,通过控制器的指令来吸收再生制动产生的电能,并反馈当前的电池荷电状态(SOC)。本文中,电池的荷电状态由电源管理模块采用按时计数法进行估算,如式(9):

3.3 机械制动建模
本文采用台架实验的方法,通过有延时的一阶惯性环节模拟制动缸压力,方程为式(10)根据制动踏板信号按阶跃输入,幅值取Δη,增益K可按式(11)计算,整个液压盘式机械制动系统的模型为式(12):

3.4 控制系统模型
出于验证控制策略的目的,本文在模型搭建过程中简化了部分输入信号的采集过程,由于机械制动控制相对比较成熟,因此,建模过程中认为所需的机械力矩可以由理想状态稳定提供。搭建的模型如下页图6所示。
4 仿真结果
设置实验初速度30 km/h,制动踏板角度分别给定为轻度制动,中度制动和紧急制动3种工况进行仿真,分别得到在3种工况下制动转矩的分配曲线和轮毂电机转速输出曲线。
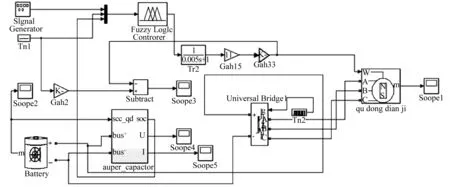
图6 控制系统模型
从图7可以看出,轻度制动工况下,车速较高时,总制动力矩全部由电制动提供,当车速降低于10 km/h时,电制动失效,由机械制动提供制动力矩。

图7 30 km/h轻度制动强度下
图8 表明,中强度制动时,总制动力矩无法由电制动单独提供,由机械制动补充,随着车速下降,电制动力矩逐渐减小,由机械制动提供制动力至停车。

图8 30 km/h中度制动强度下
图9 表明,紧急制动时,制动力矩仅由机械制动提供。

图9 30 km/h紧急制动
5 结论
本文验证了轮毂电机多伦独立驱动电传动车辆运用机电联合制动的可行性。通过轻微制动,中度制动和紧急制动3种工况下的实验,可以说明运用模糊逻辑控制策略可以有效的实现车辆制动,体现出了良好的制动效能,与实际运行状态相符。
本文只作了车辆制动的底层控制研究,有很强的基础性,可以为下一步做多轮制动力分配控制和顶层设计提供好的依据。
[1]石辛民,郝整清.模糊控制及其Matlab仿真[M].北京:清华大学出版社,2008.
[2]李峰,谷中丽,刘晓星.混合动力履带车辆机电联合制动模糊控制策略研究[J].汽车工程学报,2012,26(3):221-227.
[3]周秋军,谷中丽,孙逢春.履带车辆电传动系统电气机械联合制动仿真[J].计算机仿真,2005,21(11):226-229.
[4]谢成祥.关于MARLAB5.3电气系统模块库中永磁同步电机模型的讨论[J].电气传动,2003,44(2):51-52.
Control Strategy Study on Combined Mechanical and Electrical Braking of Several Rounds of Independent Wheel Hub Motor Driven Vehicles
YAN Yu-lin,LIAO Zi-li,LIU Chun-guang,LI Li-yu
(Academy of Armored Force Engineering,Beijing 100072,China)
In order to improve the energy utilization of several rounds of independent wheel hub motor driven vehicles,based on the type of the vehicle mechanical and electrical brake system,this paper designs a set of fuzzy control strategy,used to allocate power and recycle part of the braking energy.And Matlab off-line simulation experiment is carried out,the experiment results show that the control strategy can effectively distribute brake torque,increase the efficiency of the brake and recycling of energy.
mechanical and electrical brake,fuzzy control,wheel hub motor
TP271
A
1002-0640(2015)05-0120-04
2014-03-15
2014-04-28
军队“十二五”装备预研基金项目(40402050101)
燕玉林(1989- ),男,山东泰安人,硕士研究生。研究方向:控制理论与控制工程。
