基于AM-LFM和IRT的旋转微动目标成像算法*
2015-06-23张智军肖冰松
马 赢,张智军,肖冰松
(空军工程大学航空航天工程学院,西安 710038)
基于AM-LFM和IRT的旋转微动目标成像算法*
马 赢,张智军,肖冰松
(空军工程大学航空航天工程学院,西安 710038)
在雷达成像中,基于CS的方法因其压缩采样的特性而在高分辨雷达成像中得到广泛应用。然而由于其是一种基于参数化的成像方法,对观测位置误差特别敏感。在实际中,一般无法知道精确的观测位置。观测位置的误差会造成成像结果位置的偏离、散焦以及无法聚焦。针对基于压缩感知的成像算法存在的观测位置依赖性问题,提出了一种基于调幅-线性调频(AM-LFM)分解和逆Radon变换(IRT)的微动目标成像算法。该方法根据分解后信号调频率分离目标微动信号与主体信号,再进行IRT成像。仿真及实验结果验证了算法的可行性和有效性。
微多普勒,雷达成像,调幅-线性调频,逆Radon变换
0 引言
旋转微动目标是一类较特殊的复杂微动目标,它除目标主体部分的旋转运动外,目标微动部件自身做匀速旋转的微运动[1]。微动目标或含微动部件目标是目前雷达成像的主要类型之一,因微动带来目标信号的附加多普勒调制(即微多普勒效应)在成像过程中会污染目标主体部分的成像,这样成像处理时就要对目标主体回波和微动部件回波予以分别处理;同时目标微动部件回波信号反映了目标更精细的运动特点,通过提取这些更精细的特征为目标识别提供更多的决策信息(例如若提取弹道导弹真弹头与诱饵部件的微动特征可区分真假弹头)。
微动目标运动复杂性导致雷达成像过程中回波的建模与成像处理的困难增加,就要求图像的分辨率更高,要求对信号的采样速度更快,要求对数据处理量更大。在ISAR成像的实际中,以Nyquist采样定理为基础的传统成像方法面临巨大的挑战。近年来,在雷达成像领域中出现了基于压缩感知理论(Compressive Sensing,CS)的雷达成像方法,利用远低于Nyquist要求的采样率来采样数据并对目标信号重构成像[2]。
尽管压缩感知雷达成像技术能有效降低采样率、信号带宽和数据量,但是成像结果依赖于观测矩阵[3],这样观测位置的误差会造成成像结果位置的偏离、散焦以及无法聚焦[4]。针对上述存在的对观测位置敏感问题,本文提出了一种基于调幅-线性调频(AM-LFM)分解和逆Radon变换(IRT)的微动目标成像算法。AM-LFM分解后根据调频率的大小分离目标各结构信号分量,再进行IRT成像,分解、分离和成像几乎不受观测位置测不准误差的影响。实验仿真结果验证了本方法的正确性和有效性。
1 回波信号处理模型分析
采用电磁散射中心模型对旋转微动目标建模,微动目标ISAR成像的转台模型如图1,其中已进行平动补偿。

图1 微动目标ISAR成像的转台模型
图中XOY坐标系是微动目标的成像平面,Ro为成像中心O距雷达的距离。目标主体部分的散射点可由散射点p表示,其他主体部分散射点的调制特性与p相似,在相干积累时间内,主体部分绕O作角速度为ωo的匀速转动,散射点p距成像中心O的距离为Rp,对应的方位角为θp;目标微动部分散射点由q表示,在相干积累时间TCPI内,微动部分绕O'作角速度为ωo'的匀速转动,散射点q距成像中心O的距离为Rq,对应的方位角为θp。在成像过程中,目标主体散射点的散射系数与旋转微动散射点散射系数取时间内的平均值,可视为常数。
假设雷达发射信号为带宽为B,脉宽为Tp,脉冲重复频率为fprf的线性调频信号。在电磁散射中心模型下,散射点i的回波为:


其中,c、λ、RΔi(tm)分别为光速、波长和径向距离差,且RΔi(tm)=Ri(tm)-Ro。由式(2)对快时间进行距离压缩处理得到距离-慢时间域信号为:

对图1中的旋转微动目标,其距离-慢时间域信号为:

则频率为

则微动部件的慢时间域信号可表示为:

频率为

当目标尺寸较大或机动时,φp可二阶近似为低调频率LFM信号[65]:


则微动部件的慢时间域回波可表示为:


2 基于AM-LFM和IRT成像方法
通过式(6)~式(12),可以看出目标主体部分回波在慢时间域为调频率很低的LFM,可视为调频率接近零;目标旋转微动部分回波在慢时间域为低调频率LFM和正弦调频的复合信号。而正弦曲线可以用多个短时线段来拟合,由于微动部分微多普勒频率的时变性使得拟合线段在大多数时间段斜率不为零[7]。如图2所示。

图2 目标信号的瞬时频率分析图
接收的目标回波信号可以表示为:

其中αi为初始调频率,βi为调频率,δi(t)为调幅函数。对模型中的旋转微动目标可以认为主体部分信号βi≈0,目标微动部分信号βi≠0。所以可以依据各信号分量调频率的值对旋转微动目标的主体部分信号和微动部分信号进行AM-LFM分解,实现目标微动部分信号与主体部分的分离。采用基于CLEAN思想分离信号流程如下:
第1步:根据实际设定调频率bi的范围和量化的精度Δ,并设置迭代索引号n=0,剩余信号Xn(t)= Sn(t);
第2步:对信号Xn(t)乘以线性调频因子后进行傅里叶变换,搜索频谱取得最大峰值时对应的频率ai,则可得到估计的初始值频率和调频率为ai,bi;
根据式(13),可设置调频率阈值bm对AM-LFM分解得到的调频率进行筛选,将调频率绝对值小于bm的AM-LFM分解的信号分量对应为旋转微动目标的主体部分信号;将调频率绝对值大于bm的AM-LFM分解的信号分量对应为旋转微动目标的微动部分信号,这样就实现了旋转目标的微动部分信号与主体信号的有效分离。消除微动影响后,就可分别对目标主体部分和微动部件成像[8]。
旋转微动目标距离像序列和时频曲线都为正弦曲线,皆可对其进行IRT获得目标的二维像。对旋转目标微动部分,由于其微动幅度可能小于距离分辨率,这样可能导致IRT在利用距离像序列成像时失效,所以这里采用对旋转微动目标时频曲线IRT成像。将信号降带宽后微动目标的方位回波

式中,ρ0为复常数,目标多普勒中心频率,对应目标的方位位置Xnc。为调制指数。
则目标瞬时多普勒频率表示如下:

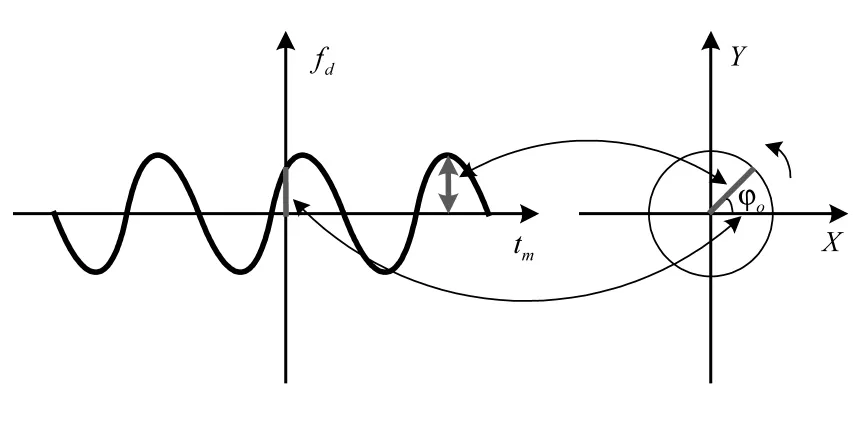
图3 逆Radon变换成像图
由图可以看出,通过IRT变换就可以将旋转微动目标的正弦时频曲线映射到极坐标上的点[9],一般可使用卷积反投影算法[10]。由Radon变换原理,(x,y)平面上一点(x0,y0),经过该点的直线u=x0cosθ+ y0sinθ经三角变换后得
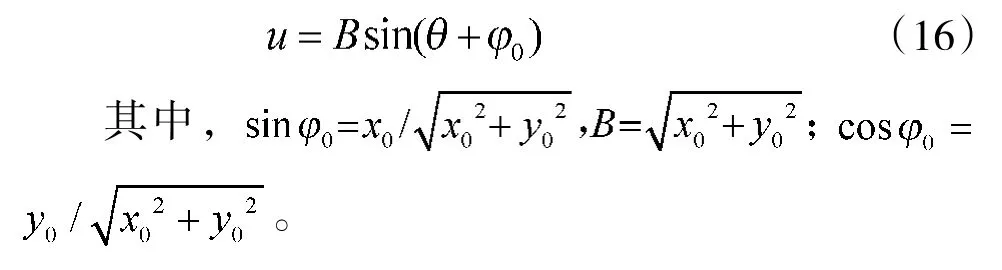
对经过该点的直线连续改变角度θ进行RT时,u随θ在平面(u,θ)上作正弦变化。所以,(u,θ)平面上一条正弦曲线对应着(x,y)平面上的一个定点(x0,y0)。
由于微动目标产生的多普勒频率为正弦曲线。因此,微动散射点时频像可表示为

其中,fm=fm_D-f0表示时频像纵轴,θ=ωt为时频像横轴。
由中心切片定理,IRT图像为
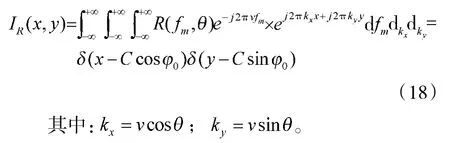
对时频正弦曲线坐标离散化:θ=ωmT,fm=nΔfm,T为时间采样间隔,Δfm为瞬时频率分辨率,等于信号积累时间的倒数,即有Δfm=1/TCPI。可见,在时频平面上的目标多普勒正弦曲线fm=Csin(θ+φ0)经过IRT后映射到参数空间上的点。
微动频率ω的测量可通过微多普勒谱二维自相关函数、倒谱分析法等周期性检测方法得到[1]。因此,实现了旋转微动目标成像。
同理,对旋转目标主体部分,可采用传统RD算法及RID算法成像[12],也可采用本文IRT算法成像,在此就不再赘述。
综上可知,基于AM-LFM和IRT的旋转微动目标成像算法流程图如图4所示。
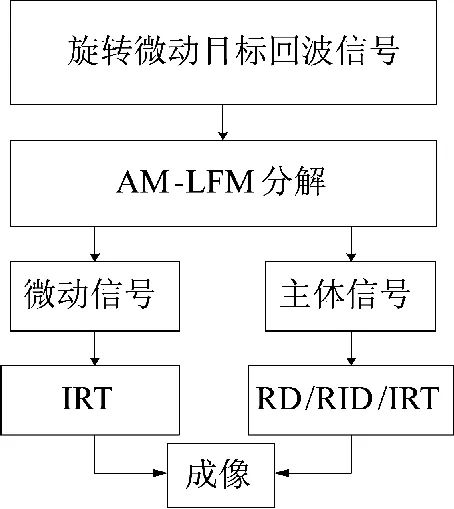
图4 基于AM-LFM和IRT的成像算法流程图
3 实验仿真及分析
为了检验本文算法,设定旋转微动目标散射点模型如图1所示,雷达工作频率为10 GHz,带宽B=600 MHz,脉宽Tp=1 μs,脉冲重复频率fr=1 kHz。雷达距目标旋转中心的距离为Ro=10 km,旋转目标作角速度为ωo=4πrad/s的匀速转动,散射点p距成像中心O的距离为Rp=10 m,对应的方位角为θq= π/4;目标微动部分散射点由q表示,在相干积累时间TCPI内,微动部分绕O'作角速度为ωo'=16πrad/s的转动,散射点q距成像中心O的距离为3m,对应的方位角为θq=π/6。
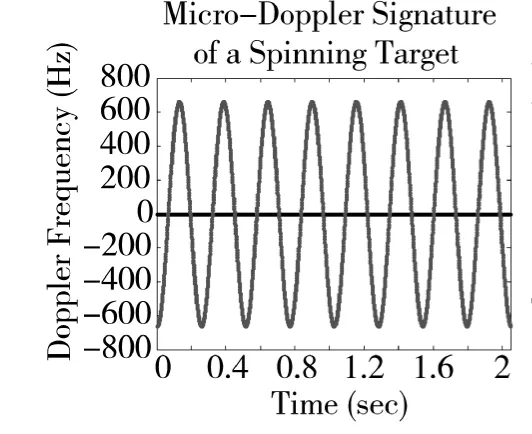
图5 旋转微动目标时频曲线图

图6 旋转微动目标主体部分时频曲线图

图7 旋转微动目标微动部分时频曲线图
如图5所示,旋转微动目标主体部分回波时频曲线为调频率接近零的LFM,近似一条平行于坐标轴的直线;目标旋转微动部分回波在慢时间域为低调频率LFM和正弦调频的复合信号。经过AM-LFM分解分离后,旋转目标的主体部分信号时频曲线如图6所示,高速旋转的微动部分信号如图7所示。信号实现了较好的分离。

图8 基于AF-LFM和IRT成像图

图9 基于RD变换成像图
将进行AM-LFM分解分离后的信号分别采用IRT成像如图6所示,信号分离后采用传统距离-多普勒成像如图7所示,由图可以看出分离后成像的聚焦性较好。但是在进行分解过程由于采用迭代筛选的方法分离信号,计算量较大,降低了该算法的实时性。综上可知,相比于传统的成像算法,在实时性要求并不严格时,本文提出的基于AM-LFM和IRT的成像算法可得到较清晰的目标主体部分图像和目标微动部分的轮廓图像,与理论分析相一致,验证了本文方法的可行性与有效性。
4 结束语
在基于压缩感知的成像方法中,观测位置的误差会造成成像结果偏离、散焦及不聚焦。本文针对压缩感知成像算法存在的观测位置误差依赖性而造成成像偏离、散焦以及无法聚焦问题,提出了一种基于调幅-线性调频(AM-LFM)分解分离和逆Radon变换(IRT)的微动目标成像算法。该方法主要依据AM-LFM分解后信号的调频率分离开目标微动信号与主体信号,不受观测位置误差的影响;而进行IRT成像时,也与观测位置无关。最后仿真及实验结果表明该算法是可行且有效的。
[1]Chen V C,Li F,Ho S,et al.Micro-Doppler Effect in Radar: Phenomenon,Model,and Simulation Study[J].IEEE Transactions on Aerospace and Electronic Systems,2006,42(1): 2-21.
[2]刘波,李道京.基于随机重复频率和压缩感知的运动目标IS-AR成像[J].中国科学院大学学报,2014,31(2): 231-237.
[3]杨俊刚,黄晓涛,金添.压缩感知雷达成像[M].北京:科学出版社,2014:102-121.
[4]徐建平,皮亦鸣.压缩感知SAR成像中的运动补偿[J].电子与信息学报,2012,34(2):294-299.
[5]吴亮,黎湘.基于RWT的旋转微动目标二维ISAR成像算法[J].电子学报,2011,39(6):1302-1308.
[6]白雪茹,周峰,刑孟道,等.空中微动旋转目标的二维IS-AR成像算法[J].电子学报,2009,37(9):1937-1943.
[7]贺思三,周剑雄,赵会宁,等.基于AM-LFM分解的微动信号提取[J].电子学报,2010,32(3):554-558.
[8]黎湘,高勋章,刘永祥.复杂运动目标ISAR成像技术进展与展望[J].数据采集与处理,2014,29(4):508-515.
[9]张贤达,保铮.非平稳信号分析与处理[M].北京:国防工业出版社,1998.
[10]邓彬.合成孔径雷达微动目标指示(SAR/MMTI)研究[D].长沙:国防科学技术大学,2011.
[11]李康乐,刘永祥,姜卫东,等.基于逆Radon变换的微动目标重构研究[J].雷达科学与技术,2010,8(1):74-80.
[12]保铮,邢孟道,王彤.雷达成像技术[M].北京:电子工业出版社,2005:78-99.
Spinning Target Imaging algorithm Based on Amplitude Modulation-Linear Frequency Modulation and Inverse Radon Transform
MA Ying,ZHANG Zhi-jun,XIAO Bing-song
(School of Aeronautics and Astronautics Engineering,Air Force Engineering University,Xi’an 710038,China)
Because of its compressed sampling property,Compressive Sensing(CS)has been applied to high resolution imaging widely.But as a parametric imaging algorithm,the imaging methods based on CS are sensitive to position error.The observing position can’t been obtained precisely in practice.Position error may cause defocusing,range migration,or even can’t imaging.So a algorithm,which decomposes radar signal to AM-LFM(Amplitude Modulation-Linear Frequency Modulation)components and determines each component’s corresponding structure by frequency modulation rate,is proposed to extract micro-motion echoes from the main body echoes and image.And the processing isn’t depend on the observing position.The experimental results show the validity and effectiveness of the proposed algorithm.
micro-doppler,radar imaging,amplitude modulation-linear frequency modulation,inverse Radon transform
TN95
A
1002-0640(2015)05-0069-05
2014-03-09
2014-05-24
航空科学基金资助项目(20145596025)
马 赢(1990- ),男,湖南邵阳人,硕士研究生。研究方向:雷达信号处理及工程运用。
