基于随机集理论的多目标跟踪方法*
2015-06-23权宏伟李俊华彭冬亮
权宏伟,李俊华,彭冬亮
(1.西京学院控制工程学院,西安 710123;2.杭州电子科技大学信息与控制研究所,杭州 310018)
基于随机集理论的多目标跟踪方法*
权宏伟1,李俊华1,彭冬亮2
(1.西京学院控制工程学院,西安 710123;2.杭州电子科技大学信息与控制研究所,杭州 310018)
多目标跟踪问题通常包括目标信号的检测与目标状态的估计,同时还涉及到对探测范围内目标数量的确定。传统的跟踪方法将目标检测、状态估计与数量确定分别使用独立的模块或算法来处理。在这种模式下,每个模块仅考虑测量数据中与其功能直接相关的信息,模块之间没有信息的交互,因而很难得到全局最优的解。基于随机集理论的多目标跟踪方法将场景内的全部目标看作一个全局变量,目标状态与目标测量分别构成各自的随机有限集。从而多目标跟踪问题可以放在一个随机集模型下的贝叶斯滤波框架中研究。在每一个滤波周期内,通过对随机集的处理,实时地估计目标的数量、状态与类型,实现多目标的联合检测、跟踪与识别。
目标跟踪,随机集,贝叶斯滤波,概率密度
0 引言
多传感器多目标的联合检测、跟踪与识别技术是多源数据融合问题中的一个难点[1-3]。传统的方法通常是将目标的检测、跟踪及识别分别使用独立的模块或算法来处理[4]。在这种模式下,每个模块仅考虑测量数据中与其功能直接相关的部分信息,其他具有潜在功用的信息往往被忽略掉。例如在传统的跟踪方法中,仅利用检测出的位置信息对目标进行状态估计。即使在回波信号中可能提取到目标的属性/身份特征,这部分信息也仅放在识别模块中处理。事实上,目标的状态与身份是密切相关的。目标的身份信息有助于推测、判别目标可能的机动模式,预测目标的运动轨迹等;反之,目标的状态信息也有助于更加准确地推断目标的类型及身份。
近年来,国内外很多学者开始尝试在检测与跟踪或跟踪与分类之间联合使用多类传感器的探测信息,并提出了许多有效的联合数据处理方法[5-8]。在异类多传感器数据融合方面,首先提出了基于雷达和电子支援传感器的联合跟踪与分类方法;随后发展了应用证据理论与贝叶斯框架的联合跟踪与识别技术。在特征辅助跟踪方面,不少文献都讨论了如何应用目标的运动学特征来提高目标的跟踪性能[9]。在雷达自动目标识别领域,已开始研究如何利用雷达回波中的多维高分辨率距离像对目标进行联合跟踪、姿态估计和身份辨识处理。同样,基于多帧信号积累的跟踪结果可以改进目标(尤其是微弱目标)的检测效果,对雷达检测前跟踪(Tracking Before Detection,TBD)的研究也显示出跟踪对检测的积极作用。
在未来的电子战与信息战中,雷达,ESM等传感器不仅要能够及时检测、跟踪战场目标,还要对目标的各种特性(如编队的数量、大小、形状、类型、态势等)进行识别,从而实现目标检测、跟踪与识别的一体化处理模式。在多传感器多目标数据融合的理论层面上,Mahler提出了基于随机有限集统计理论的贝叶斯融合框架[10]。根据这一框架,多传感器多目标联合检测、跟踪与识别的理论最优解可以表示为一个广义的递归贝叶斯非线性滤波器。然而,即便是在处理单目标的问题中,最优贝叶斯滤波器也面临计算复杂度巨大的挑战。针对滤波器的实际应用,Mahler等人又给出了最优滤波器中概率密度函数的近似计算。就单目标而言,一种快速的滤波近似算法也就是我们通常使用的常增益卡尔曼滤波器(Constant-gain Kalman Filter)。对于多传感器多目标的情况,系统的后验概率密度被它的一阶统计矩代替(称为概率假设密度)。通过对概率假设密度的递归求解,可以实现多传感器多目标的联合检测、跟踪与识别。
1 有限集统计理论
有限集统计理论(Finite-Set Statistics Theory,FISST)是基于随机集的多目标跟踪方法的理论基础,它选取随机集中一些基本和实用的概念及定理加以扩展以求最大限度地应用到工程实践中去。考虑到论文的完整性,1.1节给出随机集的部分基本概念,相关的详细介绍可以参考文献[10]。
1.1 随机集基本概念
设(Ω,σΩ,PΩ)为一概率空间,其中,Ω为样本空间,σΩ为Ω上的σ-代数,PΩ为概率测度,空间E为LCHS可测空间,(E)为空间E上的全部有限子集的集合,为包含Matheron拓扑的最小σ-代数。建立可测空间((E),),称可测映射X∶ Ω→(E)为从Ω到(E)的随机集。若∀ω∈Ω,满足,称随机集X为有限随机集。
有限随机集X的信度函数定义为:

根据定义一般不容易直接得到信度函数。实践中通常使用下面的公式来构建:


对于有限集合变量S的任意函数和不同的z1,…,zn,定义集合导数:
式中,Ez为z的一个小邻域;υ(S)为集合S的Lebesgue测度。
1.2 有限集统计理论
统计理论中的基本概念包括数学期望,协方差,先验及后验概率密度等。本节将这些概念直接扩展到基于随机集的多目标跟踪问题中。
对于参数化的全局密度函数,可以使用如下参数化的期望定义:



2 目标跟踪的有限集模型
基于随机集理论的多目标跟踪方法的一个关键问题在于构建随机集量测模型。模型构建的过程包括3个步骤:①根据已知的传感器组中各传感器的先验信息,建立全局传感器的随机量测集∑;②根据信度函数β∑(S)确定量测集∑的信度函数;③使用集合求导法则得到量测集的全局密度f∑(Z)。分别就单传感器单目标情况与多传感器多目标情况讨论如何构建随机量测模型。
2.1 单传感器单目标量测模型
假定某个传感器在无杂波环境下对单目标进行观测,传感器的检测概率PD<1,误警率PFA=0。随机观测集∑或者仅包含一个观测数据,或者为空集。假设传感器的探测特征由空间=n×V中的随机变量ψ=(Z,z)给出。定义随机集∑={Z}×,为 V上随机子集。根据前面的假设,当时,。



2.2 多传感器多目标量测模型
从单传感器单目标量测模型过渡到多传感器多目标量测模型需要进一步考虑每个量测数据是由哪个独立传感器获取的。这是因为各传感器都有自己的统计特性与探测特征,比如雷达测量目标的距离和角度,ESM测量辐射源的频率与方位等。从量测数据的统计特性上说,雷达的方位角量测比ESM的方位角量测有更小的随机误差等。因此,一个量测数据至少应该包含3个元素,即

对于传感器j,考虑存在杂波的情况,则随机量测的表示形式为:

根据上式,全局传感器的量测模型可以表示为:
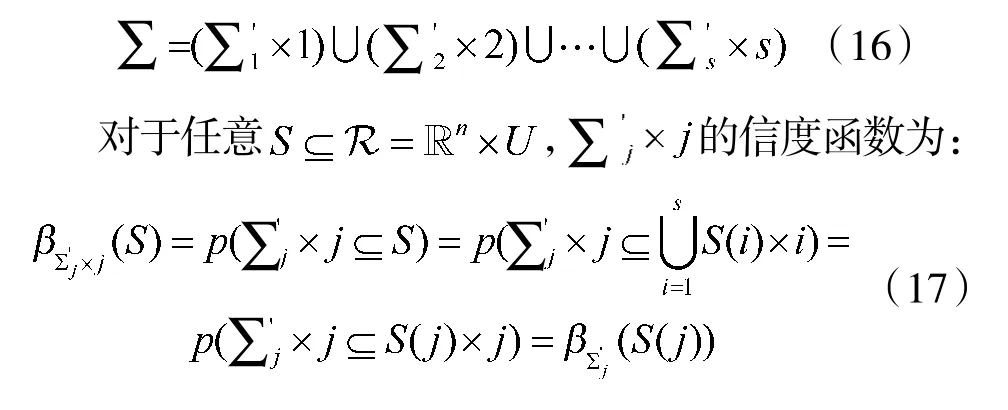


这就是说,在各传感器彼此独立的条件下,全局传感器的量测信度函数可以表示成单个传感器的量测信度函数的乘积。根据这一性质,可以得到多传感器多目标量测模型的密度函数。
3 有限集贝叶斯滤波

式中,Dk(X)代表当前目标的持续及消失;Bk(X)代表新目标的出现。
使用类似的方法得到多传感器量测的有限集表示。假设s个传感器分别获取各自的观测数据z(1),…,z(s),各传感器获取的数据用有限集Z(j)表示。全局传感器的观测数据表示为有限集。传感器量测的有限集包含了量测似然,目标检测的不确定性及杂波等信息。多传感器多目标跟踪的量测模型表示为:

式中,Ek(X)代表传感器随机噪声特性及检测概率;Ck(X)代表观测的误警及杂波。
对于每一个xk∈Xk,Ek(X)在观测集{zk}中出现的概率为pD,k(xk),出现空集的概率为1-pD,k(xk)。目标的量测过程是有函数gk(·|xk)来表征的,此时假定随机集Ek(X)与Ck(X)相互独立。
目标状态转移的不确定性与传感器量测的不确定性分别由状态转移密度fk|k-1(Xk|Xk-1)与量测似然函数gk(Zk|Xk)给出。其中,状态转移密度函数包含的信息有全局目标数,目标的运动状态,目标出现,目标消失及目标交叉等。类似地,量测似然函数包含量测似然,检测概率及杂波模型等信息。
根据贝叶斯理论,给定k-1时刻多目标状态后验密度pk-1(Xk|Z1∶k-1),目标在k时刻的预测状态密度为:

式中,pk-1(Xk|Z1∶k-1)为先验密度;fk|k-1(Xk|Xk-1)为状态转移密度;μs为对应空间上的测度。
k时刻的目标状态密度更新方程为:

通过贝叶斯方法获得全局目标的后验状态密度,然后使用有限统计学知识就可以容易地获取全局目标的目标数,单个目标的状态均值、方差等。
4 实例及分析
本节给出一维空间中一个传感器跟踪两个不同类型目标的例子。传感器的量测特征用高斯随机向量表示,没有漏检与误检。上面的假设用有限集理论表述为:目标的量测空间n=dimn=1;离散空间V={1,2}的势为N=|V|=2;状态随机集=×{1,2};传感器的量测噪声服从高斯密度[11]:

全局密度的非零参数成员为:

为了确定全局密度的极值,使用集合导数对全局密度函数f∑关于z1及z2求偏导,得:
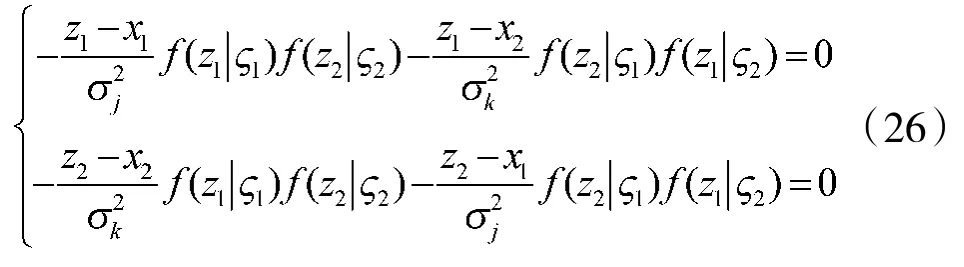
解上面的方程得到两个点(z1,z2)=(x1,x2)与(z1,z2)=(x2,x1),简记为(P,P)。继续求全局密度f∑关于点(P,P)的对数二阶偏导,得:
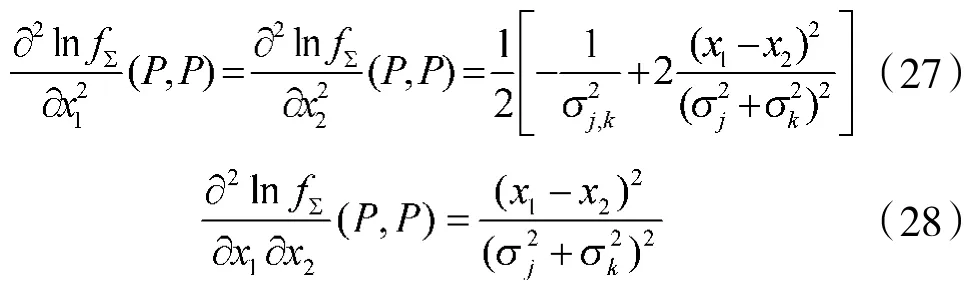
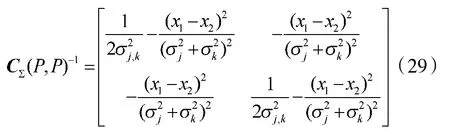
最后计算全局密度f∑在点(P,P)处的协方差矩阵。根据定义,利用全局密度f∑的对数函数在点(P,P)处的泰勒展开式得到lnf∑的二阶偏导:
[1]Mahler R.Statistical Multisource Multitarget Information Fusion[M].Norwood MA:Artech House,2007.
[2]陈金广,马丽丽.基于随机集理论的多目标跟踪研究进展[J].光电工程,2012,39(10):15-20.
[3]Ba-Ngu V,Singh S,Arnaud D.Sequential Monte Carlo Methods for Multi-target Filtering with Random Finite sets[J].IEEE Transactions on Aerospace and Electronic Systems,2005,41(4):1224-1245.
[4]彭冬亮,文成林,薛安克.多传感器多源信息融合理论及应用[M].北京:科学出版社,2010.
[5]Angelova D,Mihaylova L.Joint Target Tracking and Classification with Particle Filtering and Mixture Kalman Filtering Using Kinematic Radar Information[J].Digital Signal Processing,2006,16(1):180-240.
[6]李乐,嵇成新.基于SOFM神经网络的多目标跟踪方法[J].四川兵工学报,2013(4):20-23.
[7]Samil A M,Afsar S.A Tracker-aware Detector Threshold Optimization Formulation for Tracking Maneuvering Targets in Clutter[J].Signal Processing,2011,91(9):2213-2221.
[8]田淑荣,盖明久,何友.随机集的概率假设密度粒子滤波[J].海军航空工程学院学报,2006,21(04):455-458.
[9]Ma W K,Ba-Ngu V,Singh S S,et al.Tracking an Unknown Time-varying Number of Speakers Using TDOA Measurements:a Random Finite Set Approach[J].IEEE Transactions on Signal Processing,2006,54(9):3291-3304.
[10]Bar-Shalom Y,Kirubarajan T,Gokberk C.Tracking with Classification-aided Multiframe Data Association[J].IEEE Transactions on Aerospace and Electronic Systems,2005,41(3):868-878.
[11]Nguyen H T.An Introduction to Random Sets[M].London:Taylor&Francis Group,LLC,2006.
Multi-target Tracking Based on Random Set Theory
QUAN Hong-wei1,LI Jun-hua1,PENG Dong-liang2
(1.School of Control Engineering,Xijing University,Xi’an 710123,China;
2.Institute of Information and Control,Hangzhou Dianzi University,Hangzhou 310018,China)
The multi-target tracking problem usually concerns the signal detection and state estimation,where the determining of the number of the targets in surveillance range is also involved. The traditional techniques handle this problem using separate modules or algorithms.In this pattern each module just takes the information directly related to its functions into account in measurement data,there is no information interacting existed within modules with each other,so it is difficult to get a global optimal solution.In method of random set based multi-target tracking all of the targets are considered as a global variable in the scenario,the target states vector and target measurement data constitute a random finite set respectively.With this idea,the research of multi-target tracking problem can be put into a unified framework of Bayesian filtering based on random set theory.In each cycle of filtering,the joint detection,tracking and recognition can be achieved by online estimating the parameters of random sets.
target tracking,random set,bayesian filtering,probability density
TP271
A
1002-0640(2015)05-0049-04
2014-03-06
2014-04-28
国家自然科学基金(61174024);陕西省教育厅科研计划基金(14JK2159);西京学院高层次人才专项基金资助项目(XJ14B01)
权宏伟(1979- ),男,四川广元人,博士。研究方向:多源信息融合、目标跟踪。
