双机编队超视距攻击协同优势评估*
2015-06-23康志强寇英信李战武罗卫平
康志强,寇英信,李战武,罗卫平
(空军工程大学航空航天工程学院,西安 710038)
双机编队超视距攻击协同优势评估*
康志强,寇英信,李战武,罗卫平
(空军工程大学航空航天工程学院,西安 710038)
针对双机协同超视距攻击中的态势评估和协同优势评估,提出了基于编队状态的协同优势评估方法。首先分析并将编队完成超视距攻击的过程划分为4个状态阶段;其次建立了基本的超视距攻击态势评估模型;最后讨论了编队不同状态下的协同优势评估方法并建立了模型。仿真结果表明,该算法模型能够较为准确地评估双机编队在超视距攻击中的协同优势。
超视距空战,协同优势,评估,作战状态
0 引言
现代空战任务[1]按照过程分为超视距空战和视距内空战[2]。随着预警发现能力、数据链分析处理能力和超视距空战能力等作战性能的发展,超视距空战成为主流军事强国追求的空战主要模式[3]。然而,考虑到超视距空战与近距空战在态势评估上的差异,比如近距空战体现在飞机武器攻击能力和机动能力,而超视距空战中取决于机载雷达探测能力和中远程导弹的性能[4],文献[5]提出了基于空域划分和遗传神经网络的超视距态势评估方法,文献[6]提出了基于导弹攻击区的超视距空战态势评估改进方法。但是,关于双机协同下超视距空战攻击优势评估的研究内容不够详细,尤其是双机协同下的协同优势无法体现出来,本文在前人基础上提出了基于状态更新的双机协同超视距攻击优势评估方法,重点体现了超视距攻击中双机协同作用的优势所在。
1 双机协同超视距空战过程描述
协同超视距空战中,双机编队在预警指挥引导下逐渐接近敌机(一般采取探测/隐蔽接敌策略),双机通过数据链共享探测态势信息,当双机经历协同探测与网络跟踪、瞄准等状态后,达到导弹攻击条件完成导弹发射。攻击前的整个过程关键在于双机协同对态势的把握和攻击前的机动占位,而这个过程中包含了目标未知、协同探测、网络跟踪和网络瞄准4个状态。本文通过研究双机编队在这4个状态变化中攻击优势,来着重评估协同优势。
2 超视距空战的基本态势评估模型
超视距空战中,我机P与敌机T的相对距离D、目标机方位角φ、进入角φ等参数的敌我态势如图1所示。
图1 敌我几何态势图
根据文献[7]中定义的总体优势指数,基本攻击优势来源于我方编队的动态优势Tdynamic和静态优势Tstatic。
2.1 动态优势
包含距离优势TD、角度优势TA和能量优势TN。距离优势定义如下:
式中,将敌机与我机之间的距离分为雷达最大搜索距离DRmax、导弹最大攻击距离DMmax、导弹不可逃逸区最大/最小距离 Dno-escapemax/Dno-escapemin4个划分点,单位均为km。
角度优势定义为:

k1和k2分别是方位角优势Tφ和进入角优势Tφ的权重系数,且k1+k2=1,超视距空战中方位角优势比进入角优势所占的比重更大,因此,k1应该更大一点。本文将方位角优势划分为5个区间,这5个区间的方位角优势函数是不同的:
式中,φ、φRmax、φMmax、φno-escapemax分别为目标机方位角、雷达最大搜索方位角、空空导弹最大离轴发射角、不可逃逸区圆锥角。对于进入角优势,本文通过50°作为阶段点定义:

式中,φ为目标机进入角。
复方妥英麻黄茶碱片致苯妥英中毒的临床特征(附3例报告) … ………………… 庞冬清,刘芳,孙阳 297
能量优势包括飞机的高度、速度,高度越高,飞机速度越大,导弹对目标的威胁也就越大。所以定义飞机能量为:N=h+v2/2g,则能量优势函数表示为:

式中,N为我机能量,NT为敌机能量,h为双方高度差,v为飞机空速,g为当地重力加速度。这样动态优势即可表示为:

其中,βD、βA、βN为距离优势、角度优势和能量优势的权重。
2.2 静态优势
静态优势指的是飞机自身作战效能的优势,静态优势定义为[4]:
其中,CRi表示我方第i架飞机的作战效能,i=1或2;CBj表示敌方第j架飞机的作战效能。文献[8]定义的单机作战效能计算公式协调了飞机的机动性及操纵性、航电设备和武器系统的作战能力,适用于近距空战,而本文着重强调超视距空战中雷达探测能力和导弹攻击能力,因此,单机的作战效能为:

其中,A为飞机机动性能,B为武器攻击性能,D为飞机探测性能,E为飞机生存性能参数,F为操纵性能参数,G为基本飞行性能参数,H为电子对抗能力参数。wi为各效能参数所占权重,由层次分析法获取各数值,对B和D的权重有一定偏重。
3 状态更新下的协同优势
目标未探知状态下,双机编队依靠机载传感器和数据链进行协同探测,因为没有探测到敌机,所以该状态下的协同攻击优势体现不出来,此时的优势依然只有空间态势,即占位优势,编队攻击优势定义为:
式中,i为编队飞机编号(1或2),j为敌机编号。
协同跟踪状态下,当双机编队中A机率先实现对目标s的跟踪时,此时两架飞机将作出机动反应以使目标尽快进入本机导弹发射区达成发射条件,形成瞄准信号。这一阶段跟上一个状态评估模型相同,B机受到协同作用直接进入跟踪状态,因此,该状态下的攻击优势表示为:

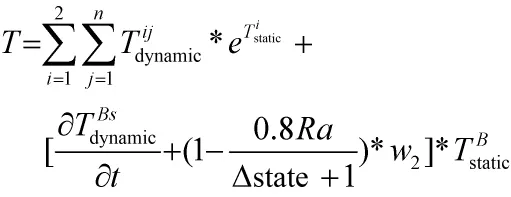
网络瞄准状态下,由于战斗机通过网络信息源获得目标坐标信息支持并用于火控计算[9],因此,当双机编队中A机率先实现对目标s的瞄准时,它的瞄准信息来源可能是B机也可能是自身,协同优势来源发生了转变。所以该阶段的攻击优势为:
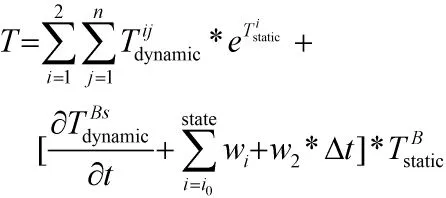
式中,如果A机瞄准A机跟踪,则协同优势由B机的动态态势变化和状态变化组成,如果A机瞄准B机跟踪,协同优势为B机对目标的持续跟踪w2*△t。
4 算例分析
仿真中,我方双机编队为同型三代机:雷达搜索方位角φRmax=±90°,最大搜索距离DRmax=180 km,导弹最大离轴发射角 φMmax=±60°,最大攻击距离DMmax=70 km,不可逃逸区Dno-escape=30 km~40 km,不可逃逸区圆锥角φno-escapemax=30°,作战效能指数为16.8;某区域有一架敌机,作战效能为18.5。设定双机编队隐蔽接敌作战想定:按固定队形隐蔽接敌(B机静默A机开雷达搜索),4个状态的权重值为wi=0.1,0.2,0.3,0.4,选取双机编队飞行过程中的7个状态点,7个状态点中S2,S4,S6,分别为编队状态发生变化的时刻,如图2所示:
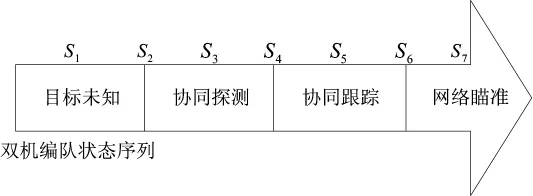
图2 编队攻击过程状态时序
取其余4个状态点S1,S3,S5,S7用来分析计算编队协同攻击态势,各状态点的信息如下页表1。
利用上述算法对双机协同超视距攻击的优势进行评估,分别得到4个状态点的总的攻击优势以及态势优势、协同优势,具体结果如下页表2。
上述结果能表明,该评估方法应用于双机协同超视距攻击时,不仅能够体现编队攻击时的作战优势和动态态势,还将双机之间的协同作用优势表现出来。表2中自S3以后随着状态深入,协同优势出现较大程度的增加,这与双方隐蔽接敌、信息协同的策略有关,更重要的是与双机之间的协同性密不可分。
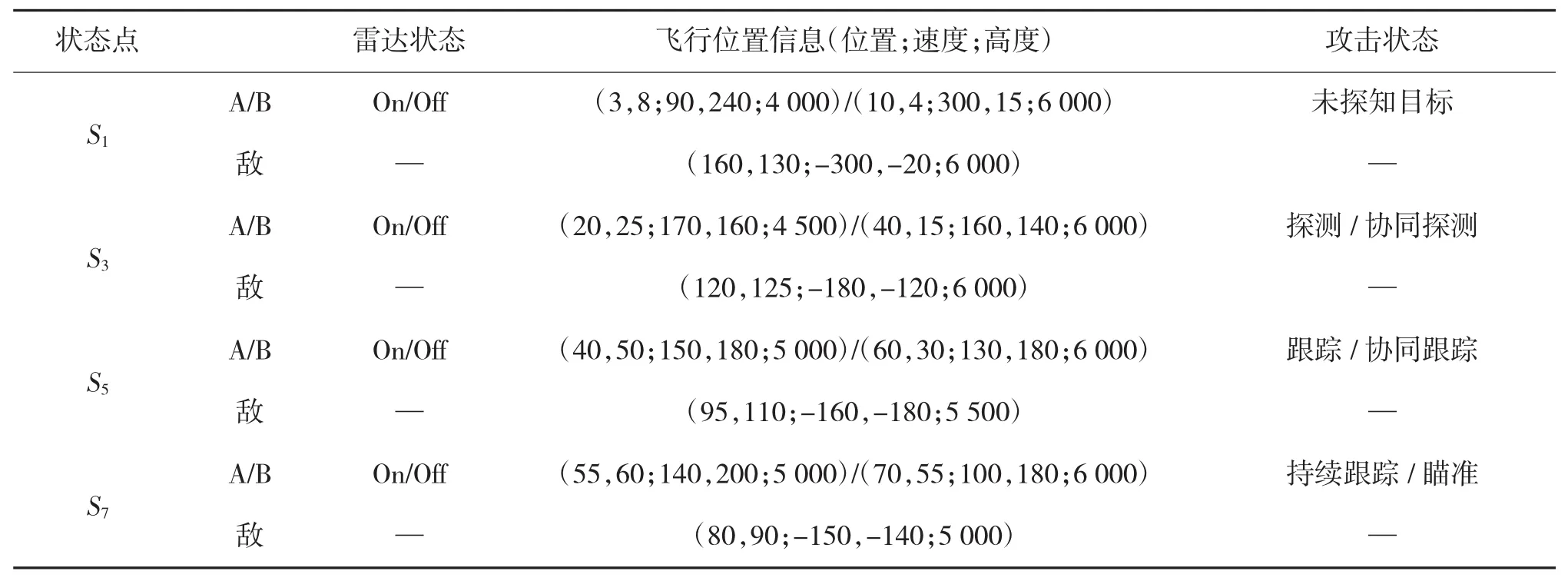
表1 双机编队不同节点的状态表
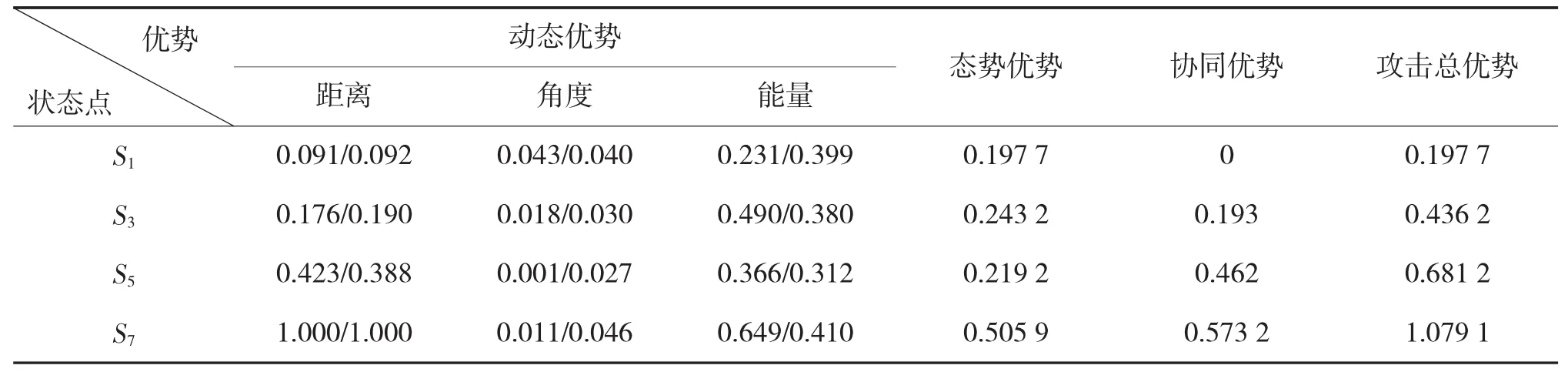
表2 各状态点攻击优势分析
5 结束语
本文针对目前编队协同作战的评估问题,提出了基于编队状态的协同优势评估方法。首先建立了基本的态势评估模型;按编队作战过程中的4个状态阶段,即探测、跟踪、瞄准过程,以双机编队为例讨论了不同状态下编队协同攻击优势的评估方法并建立了模型。最后仿真算例表明,该算法能够较为准确地体现不同攻击阶段双机间的协同效果,为编队协同作战以及训练任务评估提供了方法,对提升航空兵协同作战训练具有重要意义。
[1] Sivazlian B D.Aircraft Sortie Effectiveness Model[R]. AD-A211594,1989.
[2]康崇禄.国防系统分析方法[M].北京:国防工业出版社,2003:442-467.
[3]曲东才.超视距空空导弹与超视距空战[J].中国航天,1999(8):23-27.
[4]陈伟.空战态势威胁评估系统及关键技术研究[D].西安:空军工程大学博士学位论文,2010.
[5]肖亮,黄俊,徐钟书.基于空域划分的超视距空战态势威胁评估[J].北京航空航天大学学报,2013,39(10):1309-1313.
[6]吴文海,周思羽,高丽,等.基于导弹攻击区的超视距空战态势评估改进[J].系统工程与电子技术,2011,33(12):2679-2685.
[7]张洪波,李国英,丁全心,等.超视距空战下的态势评估技术研究[J].电光与控制,2010,17(4):9-13.
[8]高永,向锦武.超视距多机协同空战目标分配算法[J].北京航空航天大学学报,2007,33(3):286-289.
[9]付昭旺,于雷,刘霞,等.网络信息支持下目标“虚拟跟踪”方法研究[J].电光与控制,2013,20(4):1-6.
Collaborative Advantage Assessment for Two-fighter Formation in BVR Air Combat
KANG Zhi-qiang,KOU Ying-xin,LI Zhan-wu,LUO Wei-ping
(Engineering College of Aeronautics and Astronautics,Air Force Engineering University,Xi’an 710038,China)
Considering the situation assessment and collaborative advantage assessment in twofighter cooperative BVR air combat,this paper proposes a method for collaborative advantage assessment based on the formation status in combat.Firstly,the formation BVR air combat into four status is analyzed and divided;then the fundamental model for BVR air combat situation assessment is established;finally the methods for collaborative advantage assessment are discussed in different formation status and modeled for them.The results show that this algorithmic model can more accurately assess the formation collaborative advantage in BVR air combat.
BVR,collaborative advantage,assessment,operational status
V271.4
A
1002-0640(2015)07-0047-04
2014-04-08
2014-07-10
航空科学基金资助项目(20095196012)
康志强(1990- ),男,山东曲阜人,硕士生。研究方向:航空武器系统总体与仿真。
