机场三维态势呈现中IMMKF平滑ADS-B数据
2015-06-19李新胜
李新胜,李 纲
(1.四川大学计算机学院视觉合成图形图像技术国防重点学科实验室,四川成都610064;2.川北医学院基础医学院,四川南充637007)
机场三维态势呈现中IMMKF平滑ADS-B数据
李新胜1,李 纲2
(1.四川大学计算机学院视觉合成图形图像技术国防重点学科实验室,四川成都610064;2.川北医学院基础医学院,四川南充637007)
针对基于广播式自动相关监视(automatic dependent surveillance-broadcast,ADS-B)数据进行机场三维态势呈现的应用,研究了在态势显示的第一步,ADS-B数据精度不高、不平滑问题,预处理后数据可以用于后续插值生成高帧率的航迹数据。交互式多模型卡尔曼滤波(interacting multiple model Kalman filter,IMMKF)算法可以较好地解决机场场面运动目标ADS-B轨迹数据的实时平滑问题。首先,根据飞机的真实运动情况建立了飞机的匀加速运动、匀速转弯运动及匀速运动模型,然后利用卡尔曼滤波Singer模型与IMM相结合的IMMKF算法对场面飞机的ADS-B轨迹进行了跟踪滤波,达到目标轨迹光滑的效果。实验结果表明,与多种经典的滤波方法相比,IMMKF方法在保证了光滑性的情况下跟踪失败概率低,可实时计算,精度能满足要求。
机场三维态势;广播式自动相关监视;交互式多模型;卡尔曼滤波;轨迹平滑
0 引 言
广播式自动相关监视(automatic dependent surveillance-broadcast,ADS-B)的精度和数据更新率比雷达高,提供的信息更全面,是未来监视系统的发展方向[1-2]。ADS-B数据包含飞机的精确经纬度位置,还包含时戳、地址码、呼号、速度、高度等信息。
在部分基于ADS-B数据的机场管理系统中,所有飞机和机场内的车辆都装配了ADS-B终端,使它们都具备自主导航监视、通信的功能[2]。但现在的场面管制模式显示手段单一,态势信息不直观,一般都是管制员在场面活动管制系统上看到飞机或车辆目标进行管制。目标类型不同,在二维平面电子地图上显示的标牌也不同。
为了避免跑道侵入等危险事件的发生,NASA等将地面滑行管制的滑行路线与机场三维模型融合,合成机场场面视觉[3-4]。文献[5- 6]提出了先进远程塔台计划,即采集机场附近空域及其场面的各类目标信息,传输至虚拟塔台管制中心,通过虚拟现实和视觉合成技术实时展现机场态势,进行监管、指挥。
本文基于ADS-B数据针对机场态势进行三维呈现,在态势显示的第一步,对ADS-B数据精度不高、不平滑、失真较大的特性,如何提高飞机场面活动ADS-B数据平滑性进行了研究,并用机场的实际数据进行了实验。
1 IMMKF平滑原理及对比分析
用ADS-B进行三维态势显示,需处理以下问题:ADS-B是依靠全球卫星定位系统确定飞机的精确位置,这样当飞机航向是非坐标轴方向时,ADS-B呈一定角度的“之”字形,如图1所示。如果直接用于插值显示,飞机的航向会难以推算,或计算出机头摆动运动的错误状态,需要采用平滑滤波算法使航迹更加光滑,消除机头摆动的情况。
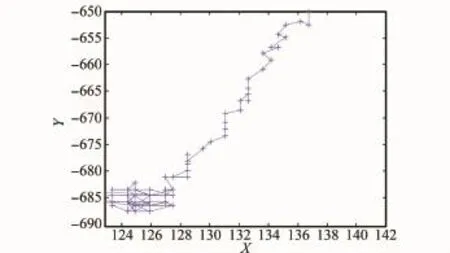
图1 ADS-B航迹呈“之”字形直行和静止“飘移”
所以,当收到大于2个以上的ADS-B航迹数据时,采用KF Singer模型与交互式多模型(interacting multiple model,IM M)相结合的交互式多模型卡尔曼滤波(interacting multiple model Kalman filter,IM MKF)算法对每一架飞机的ADS-B数据进行预处理,使目标轨迹平滑。对预处理后的数据,再插值生成高帧率航迹数据,三维显示效果才与真实态势基本相符。
对于机场态势三维态势呈现问题,飞机在机场场面运动时,一般有静止、推出、直线滑行、转弯、跑道加速起飞、跑道降落、机场可视范围内的加速上升、低速下降这几种运动情况。不同机型的飞机运动性能不同,相对于飞机在空中的运动,地面加减速的范围比较大,所以飞机在地面的运动滤波比在空中运动更为复杂。
IMM主要解决结构或参数都发生变化的估计问题[7]。IMM中目标的状态估计是多个模型所得估计的融合,按概率在各模型之间进行“切换”来综合估计目标状态[8]。部分学者研究对模型、滤波器以及数据融合技术等方面的改进[9-12]。有些学者将IMM应用于各个领域,如
从观察得知,飞机在地面运动的ADS-B数据观测与目标动态参数间呈现出一种非线性的关系,用传统的卡尔曼滤波(Kalman filier,KF)算法不易处理。理论上,在传统的工程实现中应用扩展卡尔曼滤波(extended Kalman filter,EKF)和无迹卡尔曼滤波(unscented Kalman filter,UKF)来实现对雷达目标的状态跟踪估计,虽然理论上认为对非线性运动情况有更精确的跟踪性能,但要求量测噪声是高斯噪声。在实际环境中,非平稳非高斯的量测噪声会严重地衰减KF、EKF或UKF的滤波性能,降低目标跟踪精度[1617]。并且,UKF是依靠UT变换得到一系列协方差范围内的σ点来估计状态值,随着时间的进展,协方差可能不断地增大,当协方差增大到一定程度,UKF滤波结果就发散了,这时就无法预测出真实的状态。
蒙特卡罗方法和贝叶斯理论结合的粒子滤波器(particle filter,PF)在非高斯非线性系统中被广泛研究与应用,虽然有较高的精度,但是它需要比KF、EKF和UKF高几十倍的运算时间,很难满足工程实时处理的要求。
针对这些复杂的运动状态,用单一的模型无法准确预测目标的运动状态,必然会导致滤波位置不准确,跟踪效果差。同时,三维态势呈现中目标位置精度虽然重要,但是更重要的是运动的光滑性,让目视效果看起来更真实,能保持一种运动的平稳状态。若采用IMMUKF、IMMPF等非线性滤波方法,因为UKF和PF本身就存在滤波后轨迹不够光滑和发散跟踪失败的情况,所以在此基础上采用IMM同样有目标轨迹光滑度不够并发散的问题,其滤波结果无法用于三维呈现的插值。
综合以上的考虑,本文考虑用IMMKF方法对ADS-B数据进行预处理。将IM MKF算法进行简化,并在IMM的框架下采用Singer模型进行卡尔曼滤波,提高ADS-B轨迹的光滑性,并将它用于机场的三维态势呈现。IMMKF既利用多个模型考虑了飞机目标运动的多种运动方式,又利用线性运动估计方法保持了目标运动的光滑性,能够达到三维态势呈现的要求。多传感器融合系统、卫星定位目标位置滤波以及手机定位跟踪等[13-15]。从结构原理上,IMM模型适用于飞机在地面运动情况多变的情形,文献[16]将IMM应用到机场场面监视雷达对运动目标的跟踪中,认为交互式多模型无迹卡尔曼滤波(IMM unscented Kalman filter,IMMUKF)跟踪算法在雷达场面跟踪方面具有比交互式多模型扩展卡尔曼滤波(IMM extended Kalman filter,IMMEKF)更好的效果,但文献[16]仅做了仿真实验。
2 IMMKF算法关键步骤
ADS-B是已经经过滤波处理过的数据,位置精度已经得以提升,所以预处理算法目标不再追求更高的滤波位置精度,而处理ADS-B数据后有更优的平滑性。将部分因素简化处理,将过程噪声协方差Q,量测噪声协方差R均设为常数;在进行状态预测时不再考虑过程噪声对预测的影响,认为状态预测是一种理想的情况,表示为公式(1)。
这里仅列出单个模型滤波的预测步骤,IMM方法详见参考文献[8],这里不再列出。单模型滤波步骤及符号表示如下:
步骤1 状态预测。对于每个模型j,分别计算状态值和协方差矩阵

式中,^Xoj(k-1|k-1)是交互后输出的状态值;Poj(k-1| k-1)是交互后的状态协方差矩阵;Fj是状态估计模型;过程噪声协方差Q为常数矩阵。
步骤2 量测预测残差vj(k)及新息协方差阵Sj(k)计算。对每个模型j,分别计算
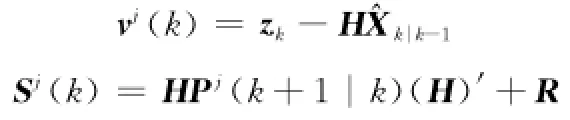
式中,每个模型j采用相同的量测模型H;zk是k时刻的量测值;量测噪声协方差R为常数矩阵。
因为飞机均在平面上滑行,所以没有考虑高度的滤波。本文采用的3个模型中一个是标准的Singer模型F1,考虑了坐标中X和Y两个方向上的位置、速度和加速度,一个顺时针转弯模型F2(ω>0),另一个逆时针转弯模型F3(ω<0)。本实验中F2的ω=0.8,F3的ω=-0.8,周期T=0.5 s。

本实验中初始的模型i转移到模型j的转移概率Πij设置为

一维的过程噪声协方差为

量测噪声协方差为

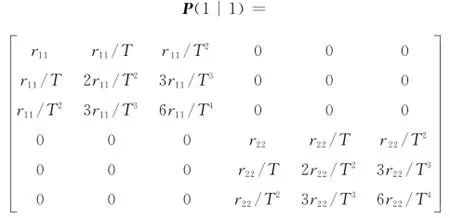
状态误差协方差矩阵初始值为
各个模型的概率初始值为

3 实验结果与分析
实验针对2011年5月30日成都双流国际机场飞机近机场活动的ADS-B数据进行了滤波处理。
3.1 滤波前后轨迹对比
本文分析了30多架次飞机机场场面活动滤波结果,列出了两个有代表性的情景,对比了PF、UKF、KF-Singer、IMMUKF和本文算法IMMKF 5种方法的滤波效果。
3.1.1 情景1
航班ZH9149从第二跑道降落,滑行至停机位,部分原始航迹位置与滤波结果如图2所示。
3.1.2 情景2
航班ZH9188,从停机位推出后,上滑行道,滑行至第一跑道,起飞后左转爬升,部分原始航迹位置与滤波结果如图3和图4所示。
3.2 实验结果分析
3.2.1 光滑性比较分析
从多架次飞机滤波效果来看,用传统的KF Singer跟踪模型算法在目标转弯时滤波轨迹位置误差大,不光滑,因为Singer所采用的状态估计模型只有F1,F 1是典型的直线运动模型,无法估计转弯时目标的状态,其转弯的位置靠协方差推算出来,所以用KF-Singer无法解决其光滑性问题。

图2 5种方法对ZH9149滑行转弯的滤波结果

图3 5种方法对ZH9188从停止到推出的滤波结果
UKF实验表明,在某些转弯位置和少数的直线行驶位置航迹偏离原始航迹过多,不准确,原因是误差累积造成结果发散。同时,UKF也是采用单模型进行状态预测的,对于机动变化大的目标,滤波精度会大大降低。
从PF方法的实验结果看,虽然PF轨迹与原始轨迹比较接近,但是其光滑性太差,还不及原始数据。
IM MUKF存在与UKF同样的问题,误差累积到一定程度后,滤波值会发散,并且也存在目标轨迹光滑度不够的问题,其滤波结果无法用于三维呈现的插值。
从滤波前后的轨迹对比来看,IMMKF方法既能处理目标机动方式多、变化大的情况,又通过简化噪声项的状态预测提高光滑性。主要原因是采用了多个模型进行滤波,飞机在地面上运动主要就是匀加速模型和顺/逆时针匀速模型,每个模型采用KF滤波恰恰又没有误差累积发散的缺点,所以再将3个模型的滤波结果进行加权组合能取得较好的效果。
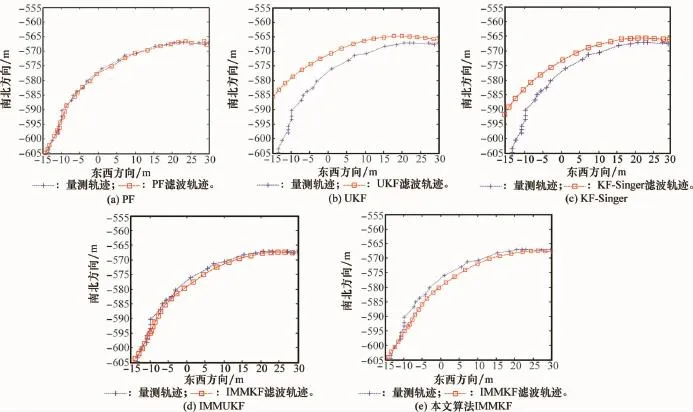
图4 5种方法对ZH9188滑行转弯的滤波结果
3.2.2 误差及效率比较分析
由于实验数据来自于实际的空中交通管制数据,没有类似于仿真实验中的真实值,所以无法估计滤波结果与真实值之间的均方根误差(root mean square error,RMSE)。ADS-B数据在得到之前已经是经过其他系统滤波处理后的结果,它的精度在20 m以内。对于三维态势呈现问题,运动的光滑性让目视效果看起来更真实,能保持一种运动的平稳状态。所以这里最实际的优劣权衡标准是人工观察对比滤波结果与观测数据的光滑接近程度、计算时间(见表1)、滤波结果与观测数据之间距离的RMSE(见表2)。

表1 不同方法的运行时间比较s

表2 不同方法的RMSE m
实验所用主机配置为i5-2320 2.69G,4 GB内存,编程环境是Matlab 2010b。情景1有4 577个航迹点,情景2处理2 815个航迹点。
PF算法所需运算时间比KF、EKF和UKF高几十倍,无法满足工程实时处理的要求,并且目标运动的光滑性也不能保证。其他4种方法耗时在PF方法的1/10以下,可以应用于实时计算,IMMKF时间上仅多于KF-Singer方法,效率已经足够高。
从实验滤波后的轨迹与观测数据的RMSE来看,几种方法都在2.5 m以下,并且大部分都在1 m以下,均有较好的精度,都可以满足滤波精度要求。IMMKF的RMSE精度仅低于KF-Singer。
相对于其他几种方法,本文所采用的IMMKF方法在保证了光滑性的情况下跟踪失败概率低,可实时计算,精度能满足要求。
4 结 论
机场三维态势呈现的ADS-B数据精度不高、不平滑问题是三维态势显示第一步必须要处理的问题。用传统的方法PF、UKF、KF-Singer、IMMUKF或轨迹不够光滑,或发散跟踪失败,或无法满足实时性。本文以ADS-B数据进行三维态势呈现的数据预处理问题为研究内容,将IMM模型与KF-Singer模型相结合,用3个模型(标准的Singer模型F1,顺时针转弯模型F 2逆时针转弯模型F3)在Markov链下进行模型概率切换,可以更好地估计飞机在地面的运动状态。综合平滑性,可以得到精度和效率比PF、UKF、KFSinger、IMMUKF更优的飞机轨迹,实验结果表明该方法可较好地显示机场的三维态势。
野值是影响3D态势显示的重要因素,如何在统一的框架下剔除野值,是下一步需研究的内容。由于篇幅有限,三维态势显示的其他方法,如插值计算和仿真计算高帧率航迹的方法将另撰文描述。
[1]Gu C P.Introduction of new ATC surveillance techniques[J].Modern Radar,2010,32(9):1- 5.(顾春平.空中交通管制监视新技术简介[J].现代雷达,2010,32(9):1- 5.)
[2]Doc.9830-AN/452.Advanced surface movement guidance and control systems(A-SMGCS)manual[S].Montreal:International Civil Aviation Organization,2004.
[3]Sachs G,Möller H,Dobler K,et al.Synthetic vision and precision navigation for aircraft taxi guidance in low visibility[C]∥Proc.of the International Conference on Navigation and Control,1994:1202- 1211.
[4]Koeners J,Kerstens K.Pictorial representation of ATC instructions for airport surface operations:design and evaluation[C]∥Proc. of the 20th Conference on Digital Avionics Systems,2001:1- 10.
[5]Schmidt M,Rudolph M,Papenfuss A,et al.Remote airport traffic control center with augmented vision video panorama[C]∥Proc.of the 28th Digital Avionics Systems Conference,2009:1- 15.
[6]Fürstenau N,Schmidt M,Rudolph M,et al.Augmented vision video panorama system for remote airport tower operation[C]∥Proc.of the 26th Congress of International Council of the Aeronautical Sciences,2008,6:569- 578.
[7]Blom H A P,Bar-Shalom Y.The interacting multiple model algorithm for systems with Markovian switching coefficients[J].IEEE Trans.on Automatic Control,1988,33(8):780- 783.
[8]Mazor E,Averbuch A,Bar-Shalom Y,et al.Interacting multiple model methods in target tracking:a survey[J].IEEE Trans. on Aerospace and Electronic Systems,1998,34(1):103- 123.
[9]Daeipour E,Bar-Shalom Y.IMM tracking of maneuvering targets in the presence of glint[J].IEEE Trans.on Aerospace and Electronic Systems,1998,34(3):996- 1003.
[10]Li X R,Bar-Shalom Y.Performance prediction of the interacting multiple model algorithm[J].IEEE Trans.on Aerospace and Electronic Systems,1993,29(3):755- 771.
[11]Lan J,Li X R,Jilkov V P,et al.Second-order Markov chain based multiple-model algorithm for maneuvering target tracking[J].IEEE Trans.on Aerospace and Electronic Systems,2013,49(1):3- 19.
[12]Li W,Jia Y.Consensus-based distributed multiple model UKF for jump Markov nonlinear systems[J].IEEE Trans.on Automatic Control,2012,57(1):227- 233.
[13]Zhang G Y,Wang F J,Wei Z S.Interacting multiple model algorithm used in multi-sensor fusion system[C]∥Proc.of the 8th International Conference on Electronic Measurement and Instruments,2007:135- 139.
[14]Lopez R,Malarde JP,Royer F,et al.Improving argos Doppler location using multiple-model Kalman filtering[J].IEEE Trans.on Geoscience and Remote Sensing,2013,52(8):4744- 4755.
[15]Li W,Jia Y.Location of mobile station with maneuvers using an IMM-based cubature Kalman filter[J].IEEE Trans.on Industrial Electronics,2012,59(11):4338- 4348.
[16]Gong S L,Wang B F,Wu H L,et al.Tracking of moving targets on airport surface based on IMM algorithm[J].Systems Engineering and Electronics,2011,33(10):2322- 2326.(宫淑丽,王帮峰,吴红兰,等.基于IMM算法的机场场面运动目标跟踪[J].系统工程与电子技术,2011,33(10):2322- 2326.)
[17]Lv X B,Zhou Q B,Chen Z M,et al.Unscented particle filter and its application to radar target tracking[J].Journal of System Simulation,2007,19(9):2097- 2100.(吕学斌,周群彪,陈正茂,等.一种改进粒子滤波器在雷达目标跟踪中的应用[J].系统仿真学报,2007,19(9):2097- 2100.)
Smooth ADS-B data by IMMKF for 3D display of airport situation
LI Xin-sheng1,LI Gang2
(1.Key Laboratory of Fundamental Science on Synthetic Vision,College of Computer Science,Sichuan University,
Chengdu 610064,China;2.School of Basic Medical Science,North Sichuan Medical College,Nanchong 637007,China)
In order to realize the 3D situation display of airport based on the automatic dependent surveillance-broadcast(ADS-B)data,its smoothing method is developed in the first step of airport 3D display.The ADS-B data must be pretreated because it is unsmooth with low accuracy for 3D display of the moving aircraft on airport surface.After smooth pretreatment,ADS-B data can be interpolated to high-frequency track data which is used for 3D display.So the interacting multiple model Kalman filter(IMMKF)algorithm is used to smooth the track.First,according to the actual movement of aircraft,three motion models with respect to constant acceleration,constant turn and constant velocity are constructed separately.Second,the IMMKF algorithm which combines IMM and Kalman Singer filter is used to track and smooth ADS-B data.Compared with other several classical filters,the experiment results indicate that this method achieves the lower failure probability of tracking with enough smoothness,realtime calculation and high accuracy.
3D situation of airport;automatic dependent surveillance-broadcast(ADS-B);interacting multiple model(IMM);Kalman filter;track smoother
TP 391
A
10.3969/j.issn.1001-506X.2015.01.33
李新胜(1977-),男,助理研究员,博士,主要研究方向为图像处理、虚实融合。
E-mail:lixinsheng@scu.edu.cn
李 纲(1978-),男,讲师,博士,主要研究方向为计算机图形学。
E-mail:lswmailcd@gmail.com
1001-506X(2015)01-0206-06
网址:www.sys-ele.com
2013- 12- 25;
2014- 07- 05;网络优先出版日期:2014- 09- 24。
网络优先出版地址:http://w ww.cnki.net/kcms/detail/11.2422.TN.20140924.1118.005.html
国家高技术研究发展计划(863计划)(2013AA013802);川北医学院科研发展计划(CBY12-A-ZP10)资助课题
