变体飞行器变形辅助机动的建模与滑模控制
2015-06-19陆宇平姚克明
殷 明,陆宇平,何 真,姚克明,2
(1.南京航空航天大学自动化学院,江苏南京210016;2.江苏理工学院电气信息工程学院,江苏常州213001)
变体飞行器变形辅助机动的建模与滑模控制
殷 明1,陆宇平1,何 真1,姚克明1,2
(1.南京航空航天大学自动化学院,江苏南京210016;2.江苏理工学院电气信息工程学院,江苏常州213001)
以伸缩翼变体飞行器为对象,研究了机翼伸缩辅助机动飞行的建模与控制问题。建立了飞行器气动参数与翼展变形率的函数关系,将机翼伸缩视为辅助操纵方式,构建了变形辅助机动的动力学模型。针对飞行器模型高度非线性的特点和机翼伸缩等会引起复合干扰的问题,提出了一种基于反馈线性化的非奇异动态终端滑模控制(non-singular dynamic terminal sliding mode control,NDTSMC)策略,在保证有限时间收敛的基础上,通过对切换信号的积分作用消除抖振,实现对不确定性的抑制。仿真结果表明,非奇异动态终端滑模控制方法能提高变体飞行器的控制精度和鲁棒性能,更好地消除抖振;变形辅助机动的变体飞行器比常规飞行器具有更强的机动性能和抗干扰能力。
变体飞行器;变形辅助机动;动力学建模;非奇异动态终端滑模控制;航迹跟踪
0 引 言
现有的航空飞行器由于固定的结构布局,需要针对特定的任务需求进行优化设计,这在多数情况下也就限制了飞行器的飞行性能。为了提高飞行器的多任务适应能力,变体飞行器的先进概念成为未来发展方向之一。
变体飞行器最重要的特点是能够在飞行过程中根据需要改变自身的外形结构,以改善气动性能,提高飞行效率,扩大任务范围。典型的变形方式包括变弯度、变翼展、变后掠以及鸥型翼、扭转翼等[1]。针对变形机构的设计与变形本身的稳定控制,多个国家开展了多项研究计划[2-5],一些大学与机构也进行了不同类别的原型设计与控制分析[6-10]。除了为改善气动性能而改变外形,如果将变形本身视为常规操控以外的辅助操纵方式,那么将有助于增强飞行器的机动性能,拓宽多任务适应能力。文献[11]分析了变体飞行器单独利用弯度变形来抑制扰动的效果;文献[12]设计了自适应控制律以通过机翼变形跟踪指定飞行轨迹;文献[13]研究了一种特殊结构的变体飞行器,利用尾翼段安装角的变化控制俯仰性能。这些研究对通过变形进行机动的可能性做了初步探索,但对于利用变形辅助传统操控共同完成协调机动的研究尚不多见,而这具有更为重要的实际应用价值,因此有必要开展这方面的建模分析与控制设计。
引入变形辅助机动后,变体飞行器将是一个高度耦合和非线性的复杂系统。考虑到参数不确定、变形误差、外界扰动等因素,为满足鲁棒性能,非奇异终端滑模控制(nonsingular terminal sliding mode control,NTSMC)成为可行的选择,其能使系统在有限时间内快速收敛至稳定状态[14-15],并且不存在控制奇异区域,在近空间飞行器[16]、多运动体航天器[17]、同步电机[1819]、柔性机械手[20]、光学扫描台架平台[21]等不同领域得到了应用。但NTSMC的控制作用中包含的不连续切换项会导致系统抖振,对控制性能不利,因此消除抖振成为其研究的热点。近些年兴起的动态滑模控制(dynamic sliding mode control,DSMC)通过对不连续切换信号的积分作用能有效消除抖振[22],提高控制精度,并应用到了高超声速飞行器[2324]、可逆冷带轧机[25]等研究中。
本文以一种机翼可伸缩的变体飞行器为对象,研究了变形辅助机动的建模与控制问题。首先分析并建立机翼伸缩对飞行器气动性能的影响函数,再将机翼伸缩视为辅助操纵方式,结合常规操纵,建立变体飞行器变形辅助机动的纵向动力学模型。基于微分几何理论对该非线性系统进行反馈线性化解耦后,为抑制复合干扰等不确定性因素的影响,本文提出一种新的非奇异动态终端滑模控制(non-singular dynamic terminal sliding mode control,NDTSMC)策略,通过引入DSMC对不连续切换控制信号的积分作用来消除抖振。最后通过航迹跟踪仿真实验,验证NDTSMC相比一般NTSMC的改进效果,并说明变体飞行器变形辅助机动的优势。
1 变体飞行器变形辅助机动的动力学建模
1.1 机翼伸缩对气动参数影响的函数建模
本文研究对象是一种可以在飞行中对称伸缩机翼的变体飞行器,能在本体翼展和两倍翼展之间连续变化,如图1所示。机翼伸缩用翼展变形率度量,定义为ξ=Δb/b,其中b是本体翼展,Δb是翼展变形量,则ξ∈[0,1]。由于机翼后掠角和上反角都约为0,因此机翼伸缩对飞行器质心位置和绕机体y轴的转动惯量的影响忽略不计。

图1 伸缩翼变体飞行器示意图
机翼伸缩是一种大尺度的结构变形,为分析其对飞行器整体气动性能的影响,需要建立气动参数与机翼伸缩之间的函数模型。通过Datcom软件仿真计算不同翼展变形率ξ下的气动参数,利用Matlab分析、拟合所有相关数据,得到升力系数CL、阻力系数CD、俯仰力矩系数Cm的近似表达为

式中,α为迎角;δe为升降舵偏角;各气动导数及零迎角时的气动系数分别是ξ的函数

可见,机翼伸缩能直接改变飞行器的气动参数,从而影响整体的气动性能,这正是变形对于飞行器的本质作用。
1.2 变形辅助机动的变体飞行器动力学建模
建立了机翼伸缩对飞行器气动参数的影响函数之后,进一步构建变体飞行器纵向运动非线性模型

式中,V,h为飞行速度和高度;θ,q为俯仰角和俯仰角速度;m,Iy为飞行器的质量和绕y轴的转动惯量;g为重力系数;推力T=Tδtδt,Tδt为推力系数,δt为油门开度;升力L、阻力D和俯仰力矩M分别为

式中,动压Q=0.5ρV2,ρ为空气密度;Sw,cA为机翼参考面积和平均几何弦长。可见,相比常规飞行器,变体飞行器的动力学模型中增加了机翼伸缩带来的气动性能影响。
将翼展变形率ξ作为新的辅助控制,这样变形辅助机动的变体飞行器就有了3个输入变量:δe、δt和ξ,进而对原始模型式(3)展开、整理,得到
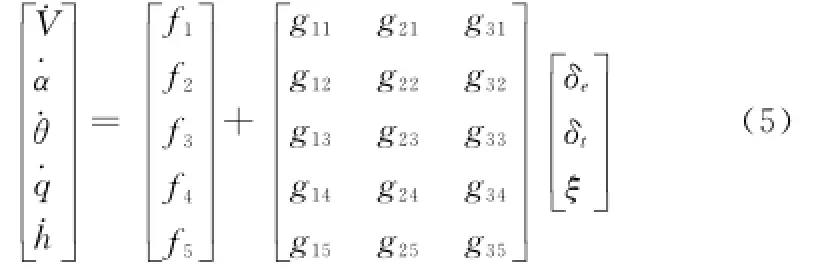
式中,各非线性函数分别为

至此,式(5)~式(9)完整描述了变体飞行器变形辅助机动的系统模型。
为便于描述,定义状态向量

输入向量

则变体飞行器变形辅助机动模型式(5)可描述为

式中


2 基于反馈线性化的解耦控制设计
由于引入了变形辅助机动,变体飞行器模型式(12)包含了许多复杂的耦合关联。本节通过反馈线性化方法对变体飞行器模型进行解耦控制。
选择变体飞行器变形辅助机动的控制目标为飞行速度、俯仰角和飞行高度,则输出函数y=h(x)为

根据微分几何理论,计算出系统的相对阶为{1,2,2},其总和等于系统维度,因此定义如下坐标变换:

同时,构建解耦矩阵


式中,aij(x),bi(x)(i,j=1,2,3)是由变体飞行器模型决定的李导数,具体如下:
可知矩阵式(17)是非奇异的,从而状态反馈解耦控制器设计为

式中,v=[v1v2v3]T是解耦系统的参考输入向量。
进而,为了实现这样一个目标,不仅应当明确提倡理论的多元化,“当两个隐喻相互竞争并不断相映证可能的缺陷,这样就更有可能为学习者和教师提供更自由的和坚实的效果”[25];也应始终坚持自己的独立思考,而这事实上也正是何以特别强调“理论的实践性解读”的又一重要原因,即是应当通过积极的教学实践对相关理论的真理性做出必要的检验,并促使其不断完善和进一步发展.
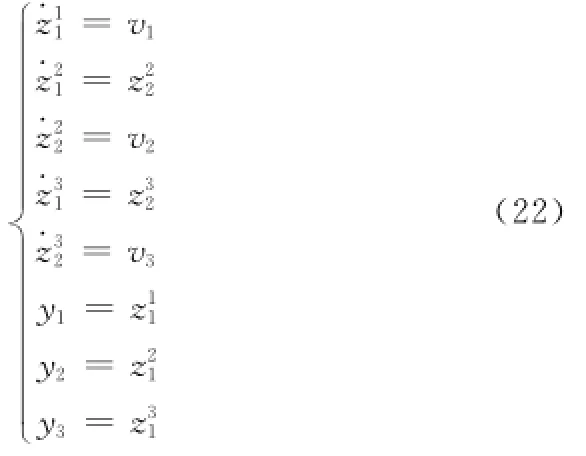
经过坐标变换式(16)和解耦控制式(21),最终得到变体飞行器变形辅助机动的输入输出线性化解耦系统为
3 非奇异动态终端滑模控制器设计
变体飞行器系统中除了一般的气动参数不精确、外部扰动等不确定因素,还有机翼伸缩带来的参数摄动、未建模动态等影响,构成了不能忽略的复合干扰。单纯的反馈线性化无法消除这样的干扰,需要设计合适的外部控制器以保证系统具有足够的鲁棒性能。本节提出一种新的滑模控制策略——NDTSMC,实现对变体飞行器变形辅助机动的全局稳定控制。
3.1 NDTSMC设计思路
在变体飞行器变形辅助机动的解耦系统式(22)中加入复合干扰,得到飞行速度、俯仰角、飞行高度3个子系统:

式中,di(t)(i=1,2,3)为3个子系统的复合干扰,且满足|di(t)|≤Mi,|˙di(t)|≤Ni,Mi,Ni(i=1,2,3)为大于零的常数。
定义变体飞行器跟踪误差为

式中,V*,θ*,h*表示飞行速度、俯仰角和飞行高度的目标指令。
对于复合干扰,NTSMC方法具有一定的鲁棒性,并且不存在控制奇异区域,但其不连续切换控制项引起的抖振不利于控制实现,甚至可能导致系统性能变差。常规的边界层法虽然能削弱抖振,却也牺牲了一定的控制性能。本文提出一种新的NDTSMC控制策略,在保留NTSMC有限时间收敛特性的基础上,利用DSMC的积分作用消除不连续切换项引起的抖振,提高变体飞行器的控制精度。
首先定义线性滑模面

式中,调节参数c2,c3>0。然后构造具有非奇异终端滑模结构的动态滑模面
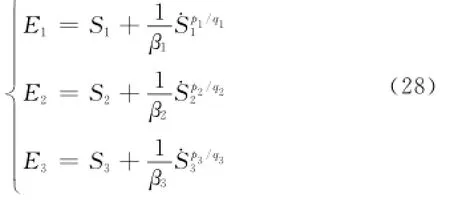
式中,设计参数βi>0(i=1,2,3);pi,qi为正奇数,且满足qi<pi<2qi。再结合指数趋近律,最终得到NDTSMC控制律为

式中,设计参数ki,ηi>0(i=1,2,3)。
可见,NDTSMC在一般NTSMC基础上,构建了两层滑模面,既保证了有限时间内的快速收敛,又将不连续切换控制信号转移到控制器的导数中,进而通过积分作用得到本质连续的控制信号,有效地消除抖振。
至此,变体飞行器变形辅助机动的完整控制结构如图2所示。

图2 变体飞行器变形辅助机动控制系统框图
3.2 稳定性证明
定理1对于变体飞行器变形辅助机动的解耦系统式(23)~式(25),构造线性滑模面式(27)和动态滑模面式(28),采用NDTSMC式(29),则闭环系统是渐近稳定的,从而实现飞行速度、俯仰角和飞行高度的渐近跟踪。
证明 变体飞行器的3个解耦子系统具有相似的控制结构,下面以飞行高度为例进行证明。
定义Lyapunov函数

则

根据式(25)和式(26),代入¨e3、e˙˙3,则

将式(29)中的v3代入式(32),经整理得
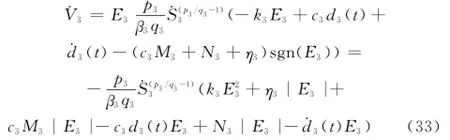
由于p3.q3为正奇数且满足q3<p3<2q3,可知≥0。从而可得

在E3≠0的时候,当˙S3≠0时,˙V3<0;当˙S3=0时,˙V3=0,而此时可以证明¨S3≠0,可知该状态不是稳定状态,即˙V3=0不会一直持续。
综上,飞行高度子系统满足Lyapunov稳定条件,闭环系统是渐进稳定的。这表明,在NDTSMC的控制作用下,动态滑模面E3将在有限时间内收敛到零,进而线性滑模面S3进入非奇异终端滑模运动状态,在有限时间内到达并保持S3=˙S3=0,最终高度误差渐近到达e3=˙e3=¨e3=0,从而实现飞行高度的渐近跟踪。
飞行速度和俯仰角子系统的证明与之类似,不再赘述。
证毕
4 仿真与分析
为验证变体飞行器变形辅助机动的优势,并检验本文所设计的NDTSMC方法的改进效果,本节通过仿真实验研究变体飞行器利用机翼伸缩辅助完成航迹跟踪的效果。
4.1 仿真目标与设计参数
仿真实验的目标是:变体飞行器初始时在1.5 km高度以马赫数为0.1的速度平飞,此时的翼展变形率ξ为0.2,即翼展为1.2倍的本体翼展。从第10 s开始跟踪指定的爬升航迹,利用机翼伸缩辅助机动,经过50 s上升至1.6 km高度后进入新的平飞状态,同时保持整个过程的速度稳定与姿态稳定。在飞行器爬升过程中,加入周期为5 s、峰值分别为20 N和400 N·m的复合力干扰和复合力矩干扰。
变体飞行器的物理参数为m=1 247 kg,Sw=17.09 m2,cA=1.74 m,Iy=4 067.5 kg·m2。机翼伸缩伺服机构的带宽为2 rad/s,速率不超过每秒5%本体翼展。大气密度为ρ=1.055 5 kg/m3。
NDTSMC控制器的设计参数经分析、调试,最终设定为c2=2,c3=1.2,β1=0.005,β2=0.1,β3=3,p1=p2=p3=7,q1=q2=q3=5,k1=0.001 4,k2=k3=1,η1=0.03,η2=η3=0.01。
4.2 变体飞行器变形辅助机动的航迹跟踪仿真
对利用机翼伸缩辅助机动的变体飞行器进行目标航迹跟踪的仿真实验,同时对仅有传统舵面和油门的常规飞行器进行同样的仿真以作对比,得到飞行状态的变化过程如图3所示,其中Δh表示高度误差。

图3 变体飞行器与常规飞行器航迹跟踪效果对比
由图3(f)可见,相比常规飞行器,变体飞行器对目标航迹的跟踪更加精确,航迹段切换时的最大偏差小于1.5 m,且在3 s左右即能重新准确跟踪到目标航迹。对于爬升阶段的复合干扰亦有很强的抑制能力,航迹跟踪精度几乎不受影响;而常规飞行器则产生了明显扰动。同时,图3(a)所示的速度稳定效果,变体飞行器也明显优于常规飞行器。事实上,常规飞行器通过升降舵和油门的调节消除复合干扰的影响,自身气动特性并未变化,如果复合干扰过大,控制效果将变差;而变体飞行器增加了变形操纵,利用机翼伸缩对飞行器气动特性的直接改变来提供辅助控制,本质地增强了控制效果和抗干扰能力。
变形辅助机动的另一优势在图3(c)中得到了突出体现。在爬升阶段,常规飞行器的俯仰角大致保持在了一个不同于平飞时的角度,同时还因干扰而不断波动;而变体飞行器则能很好地稳定在平飞角度,并且不受干扰影响。这种效果类似于现代飞机主动控制技术中的直接升力控制,在改变航迹高度的同时保持俯仰姿态,以满足特定的任务需求。因此,变体飞行器不仅可以通过变形辅助机动提高控制精度,还能提供额外的机动性能。
仿真实验中,变体飞行器与常规飞行器的控制信号如图4所示。

图4 变体飞行器与常规飞行器航迹跟踪控制信号对比
由图4可见,变体飞行器由于增加了机翼伸缩的辅助控制作用,在爬升阶段的油门开度增量大幅降低,这表明变体飞行器通过变形辅助机动能够以更少的能量消耗实现更优的目标飞行。
4.3 NDTSMC与一般NTSMC的仿真对比
第4.2节的仿真实验表明,相比常规飞行器,采用NDTSMC的变体飞行器通过机翼伸缩辅助机动能够实现更好的航迹跟踪。为进一步验证本文所提控制方法相比一般NTSMC方法的改进效果,对变体飞行器分别采用NDTSMC和一般NTSMC方法(后者采用传统边界层法消除抖振),仿真同样的航迹跟踪过程,主要对比结果如图5所示。
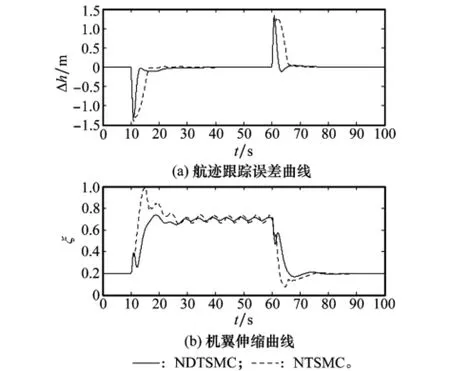
图5 变体飞行器不同控制方法航迹跟踪效果对比
由图5可见,NDTSMC比一般NTSMC的航迹跟踪精度更高,到达目标航迹的速度更快。同时,机翼伸缩的幅值降低了约30%,爬升阶段抑制复合干扰的抖动也明显减小。这表明,NDTSMC的控制信号抖振得到了更好的消除,控制精度与鲁棒性能也得到了进一步提高。
5 结 论
变体飞行器将结构变形作为辅助操控方式,有助于提高飞行器的机动性能。本文针对伸缩翼变体飞行器,研究了机翼伸缩对飞行器气动性能的影响,建立了两者的函数模型;将机翼伸缩视为辅助操纵方式,构建了变形辅助机动的纵向非线性动力学模型;设计了一种新的NDTSMC方法,保证复合干扰影响下飞行器状态的有限时间收敛,并通过积分作用消除了抖振,提高了控制精度和鲁棒性能。航迹跟踪的仿真实验表明,变形辅助机动的变体飞行器比常规飞行器具有更强的机动性能和更好的抗干扰能力,能够以更高的能量效率实现更优的机动飞行。同时,仿真对比结果也验证了本文提出的NDTSMC方法相比一般NTSMC方法提高了变体飞行器的控制精度和动态性能。
[1]Barbarino S,Bilgen O,Ajaj R M,et al.A review of morphing aircraft[J].Journal of Intelligent Material Systems and Structures,2011,22(9):823- 877.
[2]Kudva J N.Overview of the DARPA smart wing project[J].Journal of Intelligent Material Systems and Structures,2004,15(4):261- 267.
[3]Rodriguez A R.Morphing aircraft technology survey[C]∥Proc. of the 45th AIAA Aerospace Science Meeting and Exhibit,2007:1- 16.
[4]Ivanco T G,Scott R C,Love M H,et al.Validation of the Lockheed Martin morphing concept with wind tunnel testing[C]∥Proc.of the 48th AIAA/ASME/ASCE/AHS/ASC Structures,Structural Dynamics,and Materials Conference,2007:1- 17.
[5]Bowman J,Sanders B,Cannon B,et al.Development of next generation morphing aircraft structures[C]∥Proc.of the 48th AIAA/ASME/ASCE/AHS/ASC Structures,Structural Dynamics,and Materials Conference,2007:1- 10.
[6]Jouannet C,Lundström D,Amadori K,et al.Morphing wing design,from study to flight test[C]∥Proc.of the 47th AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition,2009:1- 12.
[7]Matteo N D,Guo S,Ahmed S,et al.Design and analysis of a morphing flap structure for high lift wing[C]∥Proc.of the 51st AIAA/ASME/ASCE/AHS/ASC Structures,Structural Dynamics,and Materials Conference,2010:1- 12.
[8]Felício J,Santos P,Gamboa P,et al.Evaluation of a variablespan morphing wing for a small UAV[C]∥Proc.of the 52nd AIAA/ASME/ASCE/AHS/ASC Structures,Structural Dynamics and Materials Conference,2011:1- 17.
[9]Wang Q,Chen Y,Tang H.Mechanism design for aircraft morphing wing[C]∥Proc.of the 53rd AIAA/ASME/ASCE/AHS/ASC Structures,Structural Dynamics and Materials Conference,2012:1- 12.
[10]Yin M,Lu Y P,He Z.LPV modeling and robust gain scheduling control of morphing aircraft[J].Journal of Nanjing University of Aeronautics&Astronautics,2013,45(2):202- 208.(殷明,陆宇平,何真.变体飞行器LPV建模与鲁棒增益调度控制[J].南京航空航天大学学报,2013,45(2):202- 208.)
[11]Boothe K,Fitzpatrick K,Lind R.Controllers for disturbance rejection for a linear input-varying class of morphing aircraft[C]∥Proc.of the 46th AIAA/ASME/ASCE/AHS/ASC Structures,Structural Dynamics and Materials Conference,2005:1- 14.
[12]Valasek J,Lampton A,Marwaha M.Morphing unmanned air vehicle intelligent shape and flight control[C]∥Proc.of the AIAA Infotech@Aerospace Conference,2009:1- 27.
[13]Hurst A C,Wickenheiser A M,Garcia E.Control of an adaptive aircraft with a morphing input[C]∥Proc.of the 50th AIAA/ASME/ASCE/A HS/ASC Structures,Structural Dynamics,and Materials Conference,2009:1- 6.
[14]Feng Y,Yu X H,Man Z H.Non-singular terminal sliding mode control of rigid manipulators[J].Automatica,2002,38(12):2159- 2167.
[15]Yang J,Li S H,Su J Y,et al.Continuous nonsingular terminal sliding mode control for systems with mismatched disturbances[J].Automatica,2013,49(7):2287- 2291.
[16]Pu M,Wu Q X,Jiang C S,et al.New fast terminal sliding mode and its application to near space vehicles[J].Acta Aeronautica et Astronautica Sinica,2011,32(7):1283- 1291.(蒲明,吴庆宪,姜长生,等.新型快速Terminal滑模及其在近空间飞行器上的应用[J].航空学报,2011,32(7):1283- 1291.)
[17]Xu C,Lu Y P,Liu Y B,et al.Dynamic modeling and sliding mode control of multi-moving-body spacecraft using screw theory[J].Systems Engineering and Electronics,2012,34(12):2535- 2540.(许晨,陆宇平,刘燕斌,等.多运动体航天器旋量理论动力学建模与滑模控制[J].系统工程与电子技术,2012,34(12):2535- 2540.)
[18]Li H,Dou L H,Su Z.Adaptive nonsingular fast terminal sliding mode control for electromechanical actuator[J].International Journal of Systems Science,2013,44(3):401- 415.
[19]Zheng J F,Feng Y,Lu Q L.High-order terminal sliding-mode control for permanent magnet synchronous motor[J].Control Theory&Applications,2009,26(6):697- 700.(郑剑飞,冯勇,陆启良.永磁同步电机的高阶终端滑模控制方法[J].控制理论与应用,2009,26(6):697- 700.)
[20]Wang Y M.Research on nonsingular terminal sliding mode control method for flexible manipulator[D].Harbin:Harbin Institute of Technology,2009.(王艳敏.柔性机械手非奇异终端滑模控制方法的研究[D].哈尔滨:哈尔滨工业大学,2009.)
[21]Lin F J,Chou P H,Chen C S,et al.Three-degree-of-freedom dynamic model-based intelligent nonsingular terminal sliding mode control for a gantry position stage[J].IEEE Trans.on Fuzzy Systems,2012,20(5):971- 985.
[22]Liu J K,Sun F C.A novel dynamic terminal sliding mode control of uncertain nonlinear systems[J].Journal of Control Theory and Applications,2007,5(2):189- 193.
[23]Geng J,Liu X D,Wang L.Dynamic sliding mode control of a hypersonic flight vehicle[J].Acta Armamentarii,2012,33(3):307- 312.(耿洁,刘向东,王亮.高超声速飞行器的动态滑模飞行控制器设计[J].兵工学报,2012,33(3):307- 312.)
[24]Zong Q,Wang J,Tao Y.Adaptive high-order dynamic sliding mode control for a flexible air-breathing hypersonic vehicle[J].International Journal of Robust and Nonlinear Control,2013,23(15):1718- 1736.
[25]Liu L,Fang Y M,Li J X,et al.Dynamic sliding mode decoupling control for speed and tension system of reversible cold strip mill[J].Control Theory&Applications,2013,30(8):1005- 1013.(刘乐,方一鸣,李建雄,等.可逆冷带轧机速度张力系统的动态滑模解耦控制[J].控制理论与应用,2013,30(8):1005- 1013.)
Modeling and sliding mode control of morphing aircraft for morphing-aided maneuver
YIN Ming1,LU Yu-ping1,HE Zhen1,YAO Ke-ming1,2
(1. College of Automation Engineering,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China;2.College of Electric and Information Engineering,Jiangsu University of Technology,Changzhou 213001,China)
The modeling and control of the telescopic morphing aircraft for morphing-aided maneuver are studied in this paper.The relationships between the aircraft wingspan-varying and the aerodynamic parameters are analyzed.Taking the wingspan-varying as an extra operation,the dynamic model of the morphing-aided maneuver is constructed.To deal with the high nonlinearity and the hybrid disturbances,a novel feedback linearization based non-singular dynamic terminal sliding mode control(NDTSMC)approach is proposed.The convergence of the aircraft states within a finite time is guaranteed by the NDTSMC,and the chattering is eliminated by integration of the switch control signals.The simulation results show that the control precision and the robustness of the morphing aircraft are improved by the NDTSMC with a better chattering elimination.The maneuverability and the disturbance rejection capacity of the morphing aircraft with morphing-aided maneuver are demonstrated stronger than the conventional ones.
morphing aircraft;morphing-aided maneuver;dynamic modeling;non-singular dynamic terminal sliding mode control(NDTSMC);trajectory tracking
V 249.1
A
10.3969/j.issn.1001-506X.2015.01.21
殷 明(1985-),男,博士研究生,主要研究方向为先进飞行器建模与控制。
E-mail:dragonyinming@nuaa.edu.cn
陆宇平(1957-),男,教授,博士研究生导师,主要研究方向为智能变形体控制技术、高超声速飞行精确控制。
E-mail:yplac@nuaa.edu.cn
何 真(1981-),女,副教授,博士,主要研究方向为先进飞行控制、复杂系统建模与控制。
E-mail:hezhen@nuaa.edu.cn
姚克明(1978-),男,讲师,博士,主要研究方向为复杂多体系统协调控制、飞行器控制与自主导航。
E-mail:ykm_1997@163.com
1001-506X(2015)01-0128-07
网址:www.sys-ele.com
2013- 12- 02;
2014- 05- 21;网络优先出版日期:2014- 08- 05。
网络优先出版地址:http://w ww.cnki.net/kcms/detail/11.2422.TN.20140805.1341.002.html
国家高技术研究发展计划(863计划)(2013AA7052002);国家自然科学基金(91016017,61304139);江苏省自然科学基金(BK20130234,BK20130806);江苏省高校自然科学基金(13KJD510003)资助课题
