基于改进核平滑辅助粒子滤波的失效预测方法
2015-06-19陈雄姿于劲松唐荻音李行善
陈雄姿,于劲松,2,唐荻音,李行善
(1.北京航空航天大学自动化科学与电气工程学院,北京100191;2.先进航空发动机协同创新中心,北京100191)
基于改进核平滑辅助粒子滤波的失效预测方法
陈雄姿1,于劲松1,2,唐荻音1,李行善1
(1.北京航空航天大学自动化科学与电气工程学院,北京100191;2.先进航空发动机协同创新中心,北京100191)
针对系统模型存在多个未知参数的情况,提出了一种基于改进核平滑辅助粒子滤波(improved kernel smoothing auxiliary particle filtering,IKS-APF)的失效预测方法。首先,在已有核平滑辅助粒子滤波基础上引入增益因子和加速因子,使其具有参数方差双向调节能力和更快的参数估计收敛速度。然后,使用ISK-APF进行状态和参数的联合估计,为确保参数估计的准确性同时减少参数的不确定性,设计了方差监视和短期预测误差匹配相结合的自适应粒子方差控制方案。最后,使用最新估计到的状态和参数粒子进行迭代预测,并通过统计状态粒子首达失效状态空间的时间计算出剩余使用寿命(remaining useful life,RUL)。仿真结果证明了本文方法的有效性和优越性。
失效预测;核平滑;辅助粒子滤波;参数估计;方差控制;不确定性管理
0 引 言
航空航天和武器装备领域应用预测与健康管理(prognostics and health management,PH M)技术具有提高对象系统的安全性、可靠性和降低维护成本的显著意义,该技术自21世纪初被提出以来,越来越受到行业内的重视[1]。故障/失效预测技术作为PHM的核心技术,一直是研究的热点和难点。现有的失效预测方法主要可以分为统计方法、人工智能方法和基于模型的方法[2],前两者又可以统一归为数据驱动的方法。基于模型的方法具有预测准确度高、计算复杂度小的优点,在能够获得系统失效模型的前提下,往往是预测方法的首选。
基于状态空间演化模型的粒子滤波(particle filtering,PF)方法,是当前一种较为流行的基于模型的预测方法。它一方面适用于非线性/非高斯系统,另一方面具有概率性的输出,有利于预测不确定性的表示和管理。文献[3]较早提出了一个完整的基于PF的在线故障预测框架;文献[4]将PF成功应用到锂电池的健康预测中;文献[5]为解决样本贫化问题,提出了一种权值选优的故障预测算法;文献[6]提出了一种免重采样的高斯混合模型PF故障预测算法;文献[7]设计了3种不同权值的剩余使用寿命(remaining useful life,RUL)PF有偏估计器;文献[8]针对模型参数持续时变的情况,提出了一种PF与最小二乘支持向量回归相融合的失效预测框架;文献[9]使用无迹PF来预测锂电池的剩余寿命。然而,上述文献中使用到的系统模型一般要求其所有参数都是已知的[3,5,7],或者即使包含动态可变参数,也一般假设参数的初始值和随机游走模型参数的方差是已知的[4,6,8-9]。系统物理模型是基于模型的预测方法的根本。在实际应用中,由于设备工作负载、工作环境、工作时长、个体属性等差异,同一类设备不同个体的模型也不尽相同,部分模型参数很多时候只能获悉其大概的取值范围。当模型参数的不确定性变大时,预测结果的不确定性也会随之变大。因此,研究模型包含多个未知参数情况下如何准确估计模型参数并尽可能减少其不确定性,从而提升设备RUL预测的质量具有重要意义。
为解决上述问题,本文提出了一种基于改进核平滑辅助粒子滤波(improved kernel smoothing auxiliary particle filtering,IKS-APF)的失效预测方法。使用IKS-APF算法联合估计系统的状态和参数,并设计了基于方差监视和短期预测误差控制相结合的参数方差双阶段自适应调节策略,在准确估计参数的同时减少其不确定性;最后,基于最新的状态和参数估计进行迭代实现设备RUL的预测。通过裂纹增长仿真实验对所提出的方法进行了验证。
1 问题描述
假设系统的模型在tk=kΔt时间点(简称k时刻)可以表示为

式中,xk∈Rnx是状态向量,又可称为健康指征,一般与系统的退化直接相关;θk∈Rnθ是参数向量,假设参数的初始值和变化方式未知,只知道参数的大概取值范围,同时假设参数是静态的或缓慢变化的,这种情况在实际应用中也最为常见;uk∈Rnu是输入向量,一般表示系统的外部工作条件;nk∈Rnn是过程噪声向量;fk是状态方程;zk∈Rnz是观测向量;hk是观测方程;vk∈Rnv是观测噪声向量。hk和fk可以是非线性函数,nk和vk可以是非高斯噪声,且都是已知的。
k时刻的失效预测就是基于传感器观测序列z1∶k={z1,z2,…,zk},估计当前的状态xk和参数θk值,并迭代预测未来时刻的状态xk+n(n=1,2,…)直至其达到失效阈值,该时刻就是系统的失效时间。根据贝叶斯准则,同时估计状态和参数就是要求解它们的联合概率分布

为了同时估计状态和参数,常采用联合估计方法[4,6,8-9],将系统状态和参数合并为一个增广向量x-k=[xkTθkT]T,模型式(1)转变为

这里假设未知参数θk服从一个随机游走模型,模型参数ξk~N(0,Σk),即ξk服从均值为0、方差为Σk的高斯随机分布,Σk是ξk对应的协方差矩阵,简称为超参数。PF方法得到的参数粒子越接近其真实值,分配得到的权值越大,并最终收敛于真实值。超参数Σk的大小决定了参数θk收敛的速度和收敛后的估计性能。若Σk设置较大,收敛的速度较快,但是收敛后,θk的方差较大,即不确定性较大;若Σk设置过小,收敛速度变慢,但是一旦收敛,参数的方差比较小,跟踪估计精度较高。
为了减少预测的不确定性,文献[10- 11]基于短期预测误差的外环校正来自适应调节超参数Σk,预测误差满足阈值条件,缩小超参数,反之则放大超参数。不过该方法有两个明显的不足:首先,它没有明确地给出启用外环校正的条件,如果从起始时就启用,在参数初始值未知,超参数初始设置不合适的时候,短期预测必然不能满足误差要求,这时就将陷入不断扩大超参数的恶性循环;其次,该方法只应用在了单一未知参数的情况,当存在多个未知参数时,该方法根据短期预测效果对所有超参数进行完全相同的操作,显然是不合适的。文献[12]为了处理多失效模式并存的情况,提出基于参数θk粒子群方差的多阶段自适应控制方法,各阶段均包括3个重要参数:理想的方差值、进入下一阶段的方差阈值和用于控制自适应调节程度的比例增益。该方法可以处理多未知参数的情况,然而各阶段参数的设置并无统一方法,特别是比例增益因子,很难确定;另外,该方法只能控制方差变小,一旦估计出现偏差,并不能扩大超参数,重新达到收敛,因此其鲁棒性并无保证。
为了解决上述问题,本文提出一种基于IKS-APF且具有超参数自适应调节能力的新的失效预测框架。
2 改进的核平滑辅助粒子滤波
文献[13]采用APF与参数核平滑近似相结合来估计状态和参数的联合后验分布,该方法是一种联合估计系统状态和静态未知参数的有效方法,简称为核平滑辅助粒子滤波方法。虽然预测问题中系统的未知参数可能是小幅波动或者缓慢变化的,但在任意特定需要进行参数估计的短暂时间片内,完全可以将它们当作静态参数来对待。然而,若直接将该方法应用到失效预测问题,参数粒子的方差会持续缩小至0,将不能动态跟踪参数的变化和表示参数估计的不确定性。因此,本节对原有参数核平滑方法进行了改进,引入了增益因子和加速因子,并进一步得到IKSAPF算法。
2.1 辅助粒子滤波
最常用的PF算法是采样重要性重采样(sampling importance resampling,SIR)算法,它使用先验分布p(xk|)作为重要性密度函数(其中{,i=1,2,…,Ns}是k-1时刻对应权值为{,i=1,2,…,Ns}的粒子群,Ns为粒子数目),抽样过程简单易求,但该密度函数独立于当前时刻的观测值zk,仅仅根据粒子运动和先前状态盲目抽样,使其对异常值过于灵敏,丢失大量低权重粒子。文献[14]提出采用一种更加可靠的重要性密度函数

式中,μik=E[xk|xik-1],i是粒子索引,同时也是导出重要性密度的辅助变量。μik的引入,使得k时刻的粒子xik是基于k-1时刻的先验粒子和k时刻的观测值共同产生的,更加接近于真实的状态值。相应的权值为

归一化此权值后重采样得到具有等权值的粒子集{xjk,j=1,2,…,Ns}。另外根据贝叶斯准则有

由式(4)和式(6)可以得到

这就是APF,它的重要性密度函数考虑了最新的观测信息,更接近真实状态。理论上,在过程噪声较小的条件下,可以获得更好的估计性能。
2.2 参数核平滑及其改进

该分布的均值为θ¯k-1,协方差矩阵为Vk-1+Σk。由此可见,随机游走模型致使协方差不断增大。于是,文献[13]采用核平滑的方法来减小协方差,引入平滑因子h(0<h<1)

此时,超参数Σk=h2Vk-1,核心mik-1用收缩规则迫使参数粒子向其均值靠拢

可以直接证明式(9)中混合分布的均值为θ¯k-1,协方差矩阵为Vk-1,和原来的大小保持一致。不过,由于核缩的作用,参数粒子的方差将持续减小直至为0。在设备失效预测的过程中,由于参数的动态特性、估计的不准确性(PF本身就是一种近似估计)以及各种噪声的影响,不可能也无需获得精确的参数估计值,而应该保有一定的参数粒子方差来跟踪其动态和表征它的不确定性。因此,本文对原有的核平滑方法进行改进,引入加速因子q和增益因子γ,式(9)和式(10)分别变为式(11)和式(12):

为了处理第1节中提到的参数初始值未知、仅知大概取值范围条件下的参数估计问题,对式(10)中mik-1的定义做了改进,引入了加速因子q(0<q<1),加块收敛速度。同时,超参数Σk*中添加了增益因子γ(γ≥1),它的引入使得核平滑不再仅能实现方差的缩小,通过设置它也能实现方差的放大,这种双向调节能力对于参数方差自适应调节是非常重要的。
为了避免持续核缩导致参数方差减小为0,当参数粒子方差达到理想的阈值时,应停止核缩,回到使用传统随机游走模型的跟踪估计阶段。此时式(12)中参数的值变为

2.3 改进核平滑辅助粒子滤波联合估计算法
将改进的核平滑方法融入到第2.1节中的APF算法,可得到IKS-APF状态和参数联合估计算法,算法步骤如下:
步骤1 初始化:取k=0,按p(x0)和p(θ0)分别抽取Ns个样本粒子xi0和θi0,i=1,2,…,Ns;
步骤2 对于i=1,2,…,Ns的每一个粒子,根据式(4)计算,根据式(12)或者式(13)计算m和Σ,再根据式(5)计算;
步骤4 j=1,2,…,Ns,采样N()得到,采样pk(x|,) 得到, 计算权值

步骤5 归一化权值wjk;
步骤6 设置k=k+1,当下一次量测值到来时,继续重复执行步骤2~步骤6。
3 IKS-APF预测及其不确定性管理
基于IKS-APF的失效预测框架主要包括3个阶段。假设当前时刻为λ,已知观测序列z1∶λ={z1,z2,…,zλ}。
3.1 第1阶段(k=0):粒子初始化
PF算法首先需要生成等权值的初始状态空间粒子,假设状态初始值x0已知。对于模型参数θ,若先验分布已知,直接取样即可;若只知其大致取值区间,可以在区间上进行均匀随机采样,设粒子数目为Ns。
3.2 第2阶段(1≤k≤λ):状态与参数联合估计
3.2.1 参数方差自适应调节(1≤k≤λ-p*)
根据初始粒子和观测序列,在各时刻运用IKS-APF对状态和参数进行联合估计。由于核缩的作用,参数方差逐步缩小,趋于收敛。值得注意的是:上述方法如无约束条件,参数方差将减小至0。一方面,需要减小参数方差来提高预测的精度;另一方面,由于各种噪声的存在,PF作为一种离散近似估计,即使模型参数是静态的,参数估计过程也存在不确定性,更何况参数经常会随着负载和环境的变化而缓慢变化或小幅波动,需要保有一定方差维持动态更新。因此,这里参数的精度通过监视各参数粒子的方差来控制,参数估计的准确性通过短期预测误差来判断(p*为短期预测的步数)。参数方差自适应调节策略如图1所示。

图1 参数方差双阶段自适应调节策略图
参数的方差采用文献[12]中的相对中值绝对偏差(relative median absolute deviation,RMAD)来度量,一方面它是一个鲁棒统计量,另一方面它是个相对量,相同类参数可以等同设置。其定义如下:


假设未知参数θ的维数是d,为了能够对各个参数进行独立调节,每个参数可以设有独立的平滑因子h、增益因子γ和加速因子q,分别是{,…,}、{,,…,γ}和{q10,q20,…,qd0}。双阶段自适应调节策略如下:
第1阶段 设定各未知参数RMAD高限阈值:{RT1up,RT2up,…,RTdup},任意k时刻,使用IKS-APF方法估计状态和参数后,计算各参数的RMAD值Rjk(j=1,2,…,d),并调整下一时刻的平滑因子和加速因子

式中,i=1,2,…,Ns;j=1,2,…,d。若在k*时刻,所有参数的RMAD都小于对应的高限阈值,进入下一阶段。


式中,i=1,2,…,Ns;j=1,2,…,d。
上述参数自适应调节策略的思想是:在第1阶段,采用一个比较粗犷的方差阈值(即高限阈值)作为参考,运用IKS-APF方法估计参数并使其快速收敛;一旦某个参数方差满足阈值条件,保持其相应的超参数不变,当所有的参数都满足阈值条件时,可进入第2阶段。第1阶段调节是为第2阶段的精细调节做准备,一般在所有参数满足高限阈值要求的条件下,短期预测误差满足条件有保证。在第2阶段,在参数估计准确的基础上,尽可能地缩小参数的方差,减少其不确定性。如果短期预测误差满足要求,某个参数方差不满足低限阈值要求,继续对其进行核缩;若两个要求都满足,停止核缩,保持现有超参数转为普通的随机游走;如果预测误差不满足要求,则将所有参数的加速因子设回1,增益因子和平滑因子调为设定的值,缓慢地增大各个参数的超参数,直至再次收敛。最后一种情况出现的原因有两个:核缩过度或者系统中的某些参数出现幅度较大的变化,两种情况都使得参数粒子集覆盖不到参数的真实值。由于不能确定哪些参数的变化导致预测误差的增加,因此需要对所有参数同时进行超参数放大,重新达到新的平衡。由此可见,该调节方法具有鲁棒性。各个参数的RMAD高低限阈值根据参数的动态特性来定,变化或者波动的幅度越大,对应的阈值也越高。另外,两个参数调节阶段是顺序执行的,一旦进入阶段2,不用再返回到阶段1。
3.2.2 短期估计(λ-p*+1≤k≤λ)
从λ-p*+1时刻起,不论短期失效阈值和RMAD是否满足条件,保持所有参数的超参数不变,γ和q的值均为1,持续进行状态和参数的更新。
3.3 第3阶段(k>λ):迭代预测与RUL计算
基于当前λ时刻状态和参数的联合估计^p(xλ,θλ|z1∶λ)迭代预测p次,可得到λ+p时刻的状态和参数的粒子分布



图2 二维状态下系统状态粒子轨迹演化示意图
4 实验与分析
本文使用飞机壁板的裂纹增长仿真实验来验证所提方法的有效性。裂纹增长和疲劳载荷关系密切,一般使用Paris模型[15]来描述裂纹增长与循环载荷周期之间的关系,该模型经常被用于裂纹的增长预测[7,1617]。模型如下:

式中,a是裂纹尺寸;N是周期数;C和m是与材料和环境相关的损伤模型参数;ΔK是应力强度因子幅;Δσ是应力幅。状态方程为

裂纹尺寸可直接测得,因此观测方程为

假设Δσ=78 MPa,每ΔN=30个周期,根据观测值zk估计一次模型参数Ck和mk。由于制造工艺和材料属性等的不同,飞机壁板个体之间损伤模型参数会存在差异,但是可以通过实验获得这些参数值范围的上下界[18]。针对7075-T651型号的铝合金结构材料,本文假设已知的C和m的初始分布分别服从(5×10-11,5×10-10)和(3,6)的均匀分布。设定真实参数值为ln Ctrue=ln(1.5×10-10)=-22.620 4,mtrue=3.8,在仿真过程中分别添加方差为0.04和0.01的高斯白噪声。能观测到的初始裂纹长度是0.01 m,过程噪声na是标准方差为3×10-4的高斯噪声。首先依靠式(22)中的损伤增长方程得到真实的裂纹增长数据,再添加标准方差为0.001 m的高斯噪声va,得到观测数据zk。设定失效阈值为0.046 3 m,实际裂纹增长曲线及其观测值如图3所示,真实失效时间为第88ΔN。

图3 实际裂纹增长曲线及其观测值
首先根据观测数据序列,分别使用文献[10- 11]方法、文献[12]方法和本文提出的IKS-APF方法对系统的参数Ct和mt进行估计。其中,文献[10- 11]方法的短期预测步数设为5,误差阈值为0.1,方差增大系数为1.02,缩小系数为0.95;文献[12]方法采用二阶段控制,v1*=[3%,0.6%],v2*=[1%,0.2%],T1=[10%,0],T2=[3%,0],经过反复调整,比例增益因子P1=P2=[2×10-2,5×10-2]时效果较理想;IKS-APF方法的短期预测步数同样设为5,误差阈值为0.1,两个参数的RMAD高低限阈值分别与文献[12]方法的T1和T2一致,另外两个参数的初始平滑因子均为h0=0.2,初始增益因子均为γ0=2,两个参数的加速因子也设为相同,但是分q0=1(不加速)和q0=0.95(加速)两种情况来实验。前两种方法滤波都采用SIR算法。另外4种方法粒子数目均设为2 000,初始时刻ξC与ξm的超参数ΣC和Σm均为h20与该时刻粒子方差的乘积,它们的参数估计结果如图4所示(参数C用对数形式表示)。

图4 4种方法参数估计效果对比
由图4(a)可以看出,文献[10- 11]方法估计得到的参数粒子方差不但没有减小,反而逐步增大。因为起始时刻参数粒子并未收敛,短期预测误差很难满足误差要求,调节程序进一步扩大方差,进入恶性循环,这种情况下并不适用。图4(b)表明在比例增益因子设置合理时文献[12]方法能够有效减小参数mt的方差,但是收敛速度并不快,另外对参数Ct无明显效果。究其原因,根据第2.2节分析,该方法虽然可以减小超参数的值,但随机游走模型得到的方差总体上是变大的,该方法减小粒子方差主要还是依靠PF的滤波能力(给靠近真实值的粒子更大权值),因此方差减小的速度是有限的,特别对于观测值影响不是很大的参数(例如Ct)很难起作用。由图4(c)可知,IKS-APF方法在不加速的条件下参数估计的效果和文献[12]方法比较接近。图4(d)是该方法在加速条件下的参数估计结果,相比前面的3种方法,它能够更快地将参数方差收敛到一个较低的水平,当达到对应的RMAD低限时,动态地维持稳定。
在k=55ΔN时,分别使用文献[12]方法和IKS-APF方法(加速)来预测未来裂纹增长轨迹与RUL的概率分布,结果分别如图5和图6所示。

图5 k=55ΔN时文献[12]方法裂纹预测结果

图6 k=55ΔN时IKS-APF方法(加速)裂纹预测结果
由图5可以看出,随着预测的推进,文献[12]方法预测得到的裂纹粒子增长轨迹越来越发散,预测不确定性迅速增大。虽然各时刻粒子的期望值与裂纹真实值比较接近(由于是指数增长关系,一个大于阈值的粒子可以平衡多个小于阈值的粒子),但是此时的RUL预测期望为ERUL=43.6ΔN,与真实寿命33ΔN有一定距离,且RUL的概率分布范围较宽,预测的置信度并不高。
由图6(a)可知,IKS-APF(加速)的预测期望轨迹与真实轨迹同样吻合较好,与文献[12]方法结果的一个显著不同是:由于估计得到的模型参数具有更小的方差,在预测推进过程中它的裂纹粒子增长轨迹发散的速度要慢很多。此时,RUL预测期望为39.2ΔN,更接近真实寿命33ΔN。得到的RUL概率分布如图6(b)所示,分布较陡峭,预测置信度较高。
为了更好地进行比较,分别在k=45,50,60,65,70时重复上述实验,并采用文献[19]中的PH指标、α-λ指标以及RA指标来进行预测性能评估,各指标定义如下。
PH指标值表示预测结果首次满足指定的预测准确度要求的时间点与设备失效时间点之间的时间差值。α-λ指标用来判断λ时刻是否预测准确度在此时真实RUL的α× 100%的范围内。这里将两个指标相结合,有

式中,tTTF为真实的失效时间

表示预测结果首次以大于β的概率位于真实RUL±α准确度区域的时间索引。其中,l为所有执行预测的时间索引。π[r(λ)]为预测得到的RUL概率分布在±α区域内的概率质量和,可用于度量预测的精度,α和β可根据情况设定,这里取α=0.1,β=0.4。
RA指标用于表征预测的相对准确度,即

式中,TRUL(λ)为λ时刻系统的真实RUL;ERUL(λ)为λ时刻的预测RUL期望。
当预测所得PH值、π值和RA值越大,预测方法越优越,详细比较如图7和表1所示。

图7 IKS-APF方法与文献[12]方法预测性能指标比较
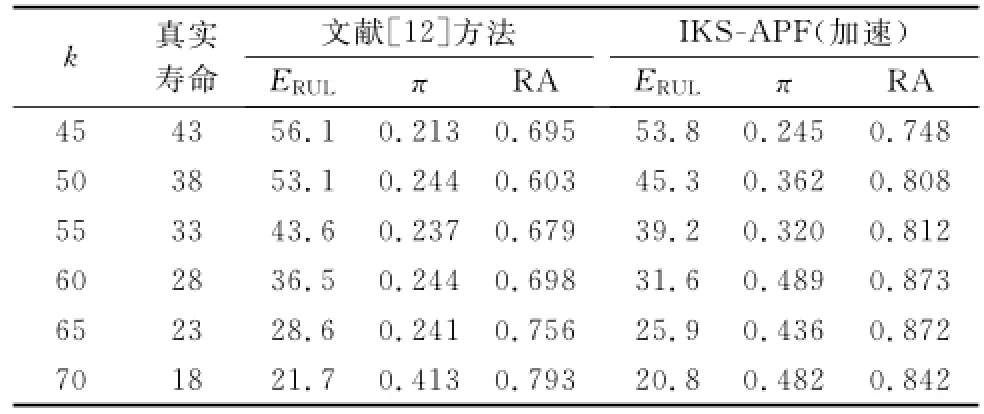
表1 IKS-APF方法与文献[12]方法预测性能指标对比
由图7(a)可知,文献[12]方法随着预测起始点的增大,RUL预测逐步靠近真实值,但是直到第70ΔN,文献[12]的预测结果都没有进入±α的准确区域。图7(b)中,IKSAPF方法(加速)随着预测起始点的增大,预测准确度提高,并在第60ΔN时以概率π=0.489(>β)首次进入±α的准确区域,所以PH=28ΔN。图7的一个显著特征是IKSAPF方法(加速)获得的RUL分布与文献[12]方法得到的分布相比更加集中在一段较小的区域内,分布曲线更加陡峭,这反映出本文方法的预测结果置信度水平更高,表1中两种方法π值的比较也证实了这一点。由表1可知,IKSAPF方法(加速)的π值和RA值要全面优于文献[12]方法,该方法估计得到的模型参数具有更小的不确定性,保证了其预测结果具有更好的准确度和置信度。
5 结 论
本文提出了一种基于IKS-APF的失效预测方法,该方法可用于解决系统模型中存在多个未知参数情况下的失效预测问题,并具有以下优点:①在原有核平滑辅助粒子滤波基础上引入了增益因子和加速因子,参数估计的鲁棒性更好,收敛速度更快;②具有参数自适应方差调节能力,通过短期预测误差来度量参数估计的准确度,同时监控参数粒子方差来调整参数估计的精度,融合了文献[10- 11]方法和文献[12]方法两者的优点,有利于减少预测的不确定性;③该方法只需知道参数的大致范围,并能够在一定程度上对多个参数进行独立的调节。裂纹增长仿真实验结果表明了本文方法比已有方法具有更好的预测准确度和置信度。
[1]Sun B,Kang R,Xie J S.Research and application of the prognostic and health management system[J].Systems Engineering and Electronics,2007,29(10):1762- 1767.(孙博,康锐,谢劲松.故障预测与健康管理系统研究和应用现状综[J].系统工程与电子技术,2007,29(10):1762- 1767.)
[2]Jardine A K S,Lin D,Banjevic D.A review on machinery diagnostics and prognostics implementing condition-based maintenance[J].Mechanical Systems and Signal Processing,2006,20(7):1483- 1510.
[3]Orchard M,Wu B,Vachtsevanos G.A particle filtering framework for failure prognosis[C]∥Proc.of the World Tribology Congress III,2005.
[4]Saha B,Goebel K,Poll S,et al.Prognostics methods for battery health monitoring using a Bayesian framework[J].IEEE Trans.on Instrumentation and Measurement,2009,58(2):291- 296.
[5]Zhang Q,Hu C H,Qiao Y K,et al.Fault prediction algorithm based on weight selected particle filter[J].Systems Engineering and Electronics,2009,31(1):221- 224.(张琪,胡昌华,乔玉坤,等.基于权值选优粒子滤波器的故障预测算法[J].系统工程与电子技术,2009,31(1):221- 224.)
[6]Zhang L,Li X S,Yu J S,et al.A fault prognostic algorithm based on Gaussian mixture model particle filter[J].Acta Aeronautica et Astronautica Sinica,2009,30(2):319- 324.(张磊,李行善,于劲松,等.一种基于高斯混合模型粒子滤波的故障预测算法[J].航空学报,2009,30(2):319- 324.)
[7]Zio E,Peloni G.Particle filtering prognostic estimation of the remaining useful life of nonlinear components[J].Reliability Engineering and System Safety,2011,96(3):403- 409.
[8]Chen X Z,Yu J S,Tang D Y,et al.A novel PF-LSSVR-based framework for failure prognosis of nonlinear systems with timevarying parameters[J].Chinese Journal of Aeronautics,2012, 25(5):715- 724.
[9]Miao Q,Xie L,Cui H J,et al.Remaining useful life prediction of lithium-ion battery with unscented particle filter technique[J].Microelectronics Reliability,2013,53(6):805- 810.
[10]Orchard M,Kacprzynski G,Goebel K,et al.Advances in uncertainty representation and management for particle filtering applied to prognostics[C]∥Proc.of the International Conference on Prognostics and Health Management,2008:1- 6.
[11]Orchard M,Tobar F,Vachtsevanos G.Outer feedback correction loops in particle filtering-based prognostic algorithms:statistical performance comparison[J].Studies in Informatics and Control,2009,18(4):295- 304.
[12]Orchard M J,Goebel K.Model-based prognostics with concurrent damage progression processes[J].IEEE Trans.on Systems,Man,and Cybernetics-Part A:Systems and Humans,2013,43(3):535- 546.
[13]Liu J,West M.Combined parameter and state estimation in simulation-based filtering[M]∥Doucet A,de Freitas J F G,Gordon N J.Sequential Monte Carlo methods.New York:Springer,2001:197- 223.
[14]Pitt M K,Shephard N.Filtering via simulation:auxiliary particle filters[J].Journal of the American Statistical Association,1999,94(446):590- 599.
[15]Paris P C,Erdogan F.A critical analysis of crack propagation laws[J].Journal of Basic Engineering,1963,85(4):528- 533.
[16]Zhang B,Sconyers C,Orchard M,et al.Fault progression modeling:an application to bearing diagnosis and prognosis[C]∥Proc.of the American Control Conference,2010:6993- 6998.
[17]An D,Choi J H,Kim N H.Prognostics 101:a tutorial for particle filter-based prognostics algorithm using matlab[J].Reliability Engineering and System Safety,2013,115:161- 169.
[18]Newman J C,Phillips E P,Swain M H.Fatigue-life prediction methodology using small-crack theory[J].International Journal of Fatigue,2009,21(2):109- 119.
[19]Saxena A,Celaya J,Saha B,et al.On applying the prognostic performance metrics[C]∥Proc.of the Annual Conference of Prognostics and Health Management Society,2009:1- 16.
Failure prognostics using improved kernel smoothing auxiliary particle filtering
CHEN Xiong-zi1,YU Jin-song1,2,TANG Di-yin1,LI Xing-shan1
(1.School of Automation Science and Electrical Engineering,Beihang University,Beijing 100191,China;2.Co-Innovation Center for Advanced Aero-Engine,Beijing 100191,China)
A failure prognostics approach based on improved kernel smoothing auxiliary particle filtering(IKS-APF)is proposed for systems with multiple unknown parameters.Firstly,a gain factor and an acceleration factor are employed in the kernel smoothing APF to bi-directionally control the parameter variance and accelerate the parameter convergence.Secondly,the IKS-APF method is used to jointly estimate the states and parameters.In order to ensure the accuracy of parameter estimation and reduce its uncertainty,an adaptive control scheme for the particle variance of parameters is presented,combining the variance monitoring and the short-term prediction errors.Finally,iterative prediction is implemented based on the latest estimated state and parameter particles,and then the remaining useful life(RUL)is calculated by the time of each propagated state particle first entering the failure zone.Simulation results demonstrate the effectiveness and superiority of the proposed approach.
failure prognostics;kernel smoothing;auxiliary particle filtering;parameter estimation;variance control;uncertainty management
TP 206
A
10.3969/j.issn.1001-506X.2015.01.17
陈雄姿(1985-),男,博士研究生,主要研究方向为预测与健康管理技术、设备失效预测与剩余使用寿命估计。
E-mail:cxzbuaa@163.com
于劲松(1968-),通讯作者,男,副教授,博士,主要研究方向为预测与健康管理技术、自动测试技术。
E-mail:yujs@buaa.edu.cn
唐荻音(1986-),女,博士研究生,主要研究方向为预测与健康管理技术、设备退化建模与视情维修策略。
E-mail:amytdy@asee.buaa.edu.cn
李行善(1938-),男,教授,博士研究生导师,主要研究方向为自动测试系统、虚拟仪器技术、预测与健康管理技术。
E-mail:lixingshan@263.net
1001-506X(2015)01-0101-08
网址:www.sys-ele.com
2014- 04- 25;
2014- 06- 19;网络优先出版日期:2014- 08- 20。
网络优先出版地址:http://w ww.cnki.net/kcms/detail/11.2422.TN.20140820.1733.006.html
航空科学基金(20100751010);北京市自然科学基金(4113073)资助课题
