低信噪比下多频段雷达数据高精度相参配准
2015-06-19邹永强高勋章
邹永强,高勋章,黎 湘
(国防科学技术大学电子科学与工程学院,湖南长沙410073)
低信噪比下多频段雷达数据高精度相参配准
邹永强,高勋章,黎 湘
(国防科学技术大学电子科学与工程学院,湖南长沙410073)
子带相参配准是多波段雷达数据融合技术首先要解决的问题,它直接关系到多波段数据融合的成败。基于数据相关与基于Prony模型的方法在弱噪声的条件下能取得比较理想的相参配准结果,但在噪声较强的条件下配准误差较大。本文分析了线性相位和固定相位对一维像的影响,在此基础上利用累加一维像的图像熵,提出了依据最小熵准则和非线性最小二乘拟合获得高精度相位参数估计的方法。仿真实验表明,本文所提出的方法在低信噪比条件下的参数估计精度优于现有的方法。
雷达数据融合;相参配准;最小熵准则;非线性最小二乘
0 引 言
目前人们对空间目标探测与识别的要求已经不仅仅停留在知道目标在哪里以及能够追踪的层面上,更为迫切的要求是知道目标是什么,由什么组成,而要完成这一任务就必须有高分辨力的雷达。根据雷达成像理论,雷达的距离分辨率由雷达发射信号的带宽决定。然而对于单部雷达而言,大的发射带宽会导致系统设计复杂度的增加和成本的大大提高。因此,利用现有工作在不同频带的多部雷达获得高分辨图像的带宽合成技术应运而生[15]。由于参与带宽合成的目标回波数据来自不同的雷达,即使采用高精度的同步技术[6],硬件差异带来的不同时延和相移依然会使相参性变差,这一点文献[1]和文献[7]都有比较详细的分析。如果不对数据进行相参配准或者相参配准的精度不够高,都将得不到理想的结果,甚至会使处理后得到的图像分辨能力弱于单部雷达图像的分辨能力。因此,对不同带宽的多部雷达的回波数据进行高精度的相参配准就极为关键。当前的相参配准方法分为两大类:一类是基于模型的方法[1-2,5,810],其主要思想是建立多个波段的Prony模型,用超分辨的方法估计出每个波段模型的参数,然后以其中一个波段为基准,用迭代或者其他方法得到导致回波相参失配的线性相位和固定相位的估计;另一类方法是基于相关的算法[7,1112],他们推导出了线性相位与一维像相关函数的关系,进而得到线性相位,又通过全局搜索的方法得到相干函数的极小值,从而得到固定相位。前一类方法由于用到较多的优化算法和超分辨的参数估计算法,总的计算量较大,且对噪声敏感;后一类方法计算量较小,但是在低信噪比下的参数估计精度较差。本文首先提出用基于三次样条插值的均匀重采样方法解决多部雷达频率采样间隔不一致的问题,之后通过分析相参失配的两段信号一维像之间的关系,总结出线性相位和固定相位对信号一维像的不同作用,近而采用累加一维像并基于最小熵准则估计出线性相位,随后用非线性最小二乘拟合的方法实现固定相位的估计。这种算法有效地提高了高杂波环境中的信号相参配准精度。
1 多波段数据均匀重采样
每个雷达在其各自的频带内是均匀采样的,但是不同雷达的采样间隔不一定相同,把它们放在一起就不再是均匀采样。文献[13]对非均匀采样进行了分析,认为非均匀采样会增大幅相补偿误差,使成像分辨率下降、一维距离像“失真”。当参与带宽合成的雷达数量增多时这个问题尤其严重,因此在相参配准之前有必要对多波段数据进行均匀重采样处理。
下面以两部工作在不同频带的邻近配置的频率步进雷达为例研究均匀重采样问题,所得结论可以直接推广应用于多部雷达的情况。雷达1的起始频率为f1,跳频间隔为Δf1,频率步进数为N1,雷达2的起始频率为f2,跳频间隔为Δf2,频率步进数为N2,且f2=f1+ΔB,ΔB>Δf·N1,ΔB为两部雷达的载频差。对于由M个散射点构成的静止目标,脉压前得到的两部雷达的基带回波分别为
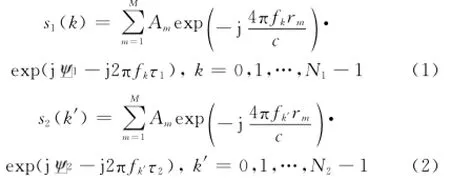
式中,Am为回波中第m个散射点的散射强度;fk=f1+k· Δf1;fk′=f2+k′·Δf2;rm为散射点相对于参考点的距离在雷达视线方向上的投影;c为电磁波在空气中的传播速度,这里近似为光速;i,τi(i=1,2)为两雷达因硬件引入的相移和时延。
不妨假设两部雷达的信号发射带宽相等,即B1=B2,同时设N1<N2,那么Δf>Δf′。图1是s1(k)和s2(k′)的采样示意图,从中可以看出,在相同的带宽内s2(k′)的采样数大于s1(k)的采样数。设均匀重采样处理后二者的采样间隔均为Δf-。
本文采用三次样条插值法得到信号的均匀采样,它能够避免高次插值产生的Runge现象,且计算简单、稳定性好、插值函数的整体光滑度较优。这里一个需要注意的问题是均匀化重采样间隔基准的选择问题:第一种情况是Δf-=Δf1,那么只需要在对s2(k′)插值后按Δf1重新采样即可,实际上是对s2(k′)减采样;第二种情况是Δf-=Δf2,这时在对s1(k)插值后要按照比原来小的间隔重采样,是增采样。从信号处理的角度考虑,数据越多后面的参数估计精度越高,但是具体到当前探讨的问题,s1(k)增采样引入的误差要大于s2(k′)减采样引入的误差,所以本文选择对s2(k′)减采样。均匀重采样后s2的采样数与s1一致,即N=N1=N2,s2的采样序列为s2(k),采样前后的结果如图1所示。这样做减小了数据误差,使均匀化重采样的数据与真实数据更接近。
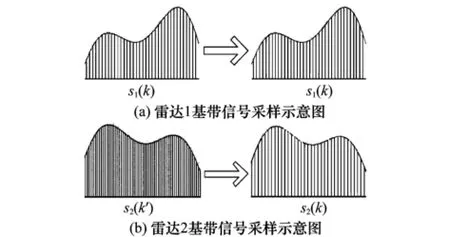
图1 两部雷达基带信号均匀重采样示意图
2 基于累加一维像最小熵的高精度相参配准
2.1 一维像的图像熵
熵[14]是信息论中的一个基本概念,主要用于定量分析离散信息源的不确定性或者信息量。对于一个给定的事件概率集合其熵定义为

由式(3)可以得到熵的如下性质:
(1)熵是非负的,即H≥0;
(2)当且仅当pi=1,pj=0(i,j=1,2,…,n;j≠i),即概率集合p对应于一个确定事件时,H=0,此时信息量是最小的,对应的熵也最小;
(3)当pi=1/n时系统的不确定性最大,信息量也最大,从而熵也达到最大值ln n;
对于宽带雷达而言,其一维距离像y={y(i)|i=1,2,…,n},其采样点幅度的分布一般按下式计算:
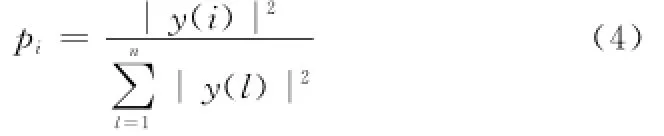
将式(4)计算的结果代入式(3)即得到y的图像熵,它也具有熵的一般性质。在逆合成孔径雷达成像中常利用熵的这些性质来实现回波的运动补偿[15-18]。
2.2 高精度相参配准
经过第1节的均匀重采样,式(2)化为
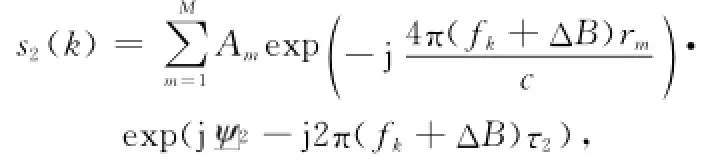

式中,fk=f1+k·Δf。对比式(1)和式(5)可以得到如下关系:

式(6)两边同时作离散傅里叶变换(discrete Fourier transform,DFT)得
式(7)两边取绝对值后得到一维距离像,经过分析可知二者的一维像仅相差一个位移,而这个位移仅与线性相位有关。因此可以在排除固定相位干扰的情况下只对线性相位进行估计。经过分析可以发现若s1(k)和s2(k)相参,则它们的一维像是对齐的,二者的一维像之和有陡峭的尖峰;如果它们不相参,二者的一维像在位置上会错开,那么它们的一维像之和的尖峰将不如相参时陡峭,甚至会出现分叉。从图像熵的观点来看,两个信号相参时,其一维像之和有最小的图像熵。因此可以用下式得到使两个信号一维像对齐的位移差:

式中,|S1((n-k)N)|是s1(k)的一维像经过循环移位后的结果;|S2(n)|是s2(k)的一维像;|S1((n-k)N)|+|S2(n)|是上述两个一维像之和,即累加一维像。
这时线性相位可由下式估计:

式中,N、k均为整数,所以要达到理想的估计精度就要求N足够大,这在硬件上可以通过提高采样率来实现,同时通过在信号末尾加入适当个数的零来减小栅栏效应也会对参数的估计精度有一定的改善。
用式(9)的线性相位对s1进行补偿,即

这时s′1、s2还没有相参,它们之间还存在一个固定相位η2需要补偿,为此本文定义一个代价函数

使式(11)达到最小值的η~2即为所求的固定相位。这实际上是一个求一维极值的问题,可以通过设定一个步长Δη,然后在[-π,π]内进行搜索,这种方法比较费时,精度与步长有很大的关系,且易受噪声干扰而得不到正确的极值。因为无法保证代价函数在[-π,π]内是一个单峰函数,所以最优化方法中的各种一维搜索也不能用在这里。为了获得更好的相参性,本文采用非线性最小二乘拟合的方法来求解。得到固定相位后,通过下式对s′1补偿:

这时sc1、s2就实现了相参。
本文提出的相参配准算法利用了信号的相参积累效应,使得算法对噪声的敏感度较低,在低信噪比的条件下依然能较好地实现相参配准。这里以同信噪比的两个信号为例来加以说明,不妨设si(i=1,2)的信号功率和噪声功率分别为P和P,且Ps1=P=Ps,P=P=Pn,所以SNR1=SNR2=SNR。如果s1的一维像循环移位k后与s2的一维像对齐,此时二者就是相参的,一方面信号的相参积累使尖峰更为陡峭,熵达到了最小值,另一方面,它们一维像之和的信号功率¯Ps=22·Ps=4Ps,噪声功率P¯n=2Pn,信噪比为4Ps/2Pn=2SNR,高的信噪比保证了计算出的最小熵的准确性。如果s1的一维像循环移位k′(|k-k′|≠0),那么尖峰将会展宽,锐利度会明显下降,熵会变大,更为糟糕的是在累加一维像中s1的一维像不仅不会增强s2的一维像,反而增强噪声的能量,近而使信噪比严重降低,导致的结果就是使熵变得更大,近一步拉开了与最小熵的距离。第3节的仿真实验将对本文所提出的算法进行验证。
3 仿真实验与分析
实验中雷达的起始频率f0=8 GHz,跳频间隔Δf=10 M Hz,频率步进数N=300,总的带宽B=3 GHz,则距离分辨率为0.05 m。目标由5个离散的散射中心组成,参考距离Rref=15 km,则各点的散射强度σi及相对Rref的距离Di(i=1,2,3,4,5)如表1所示。
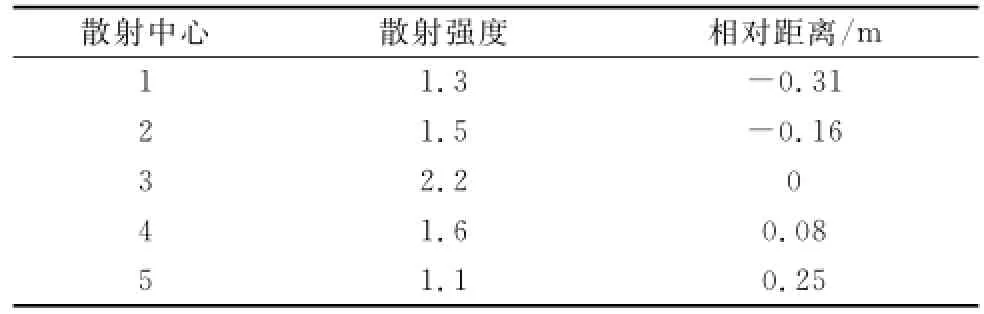
表1 各散射点的散射强度与相对距离


目标的理想基带回波为(见图2(a))
加入高斯白噪声后目标的基带回波为(见图2(b))
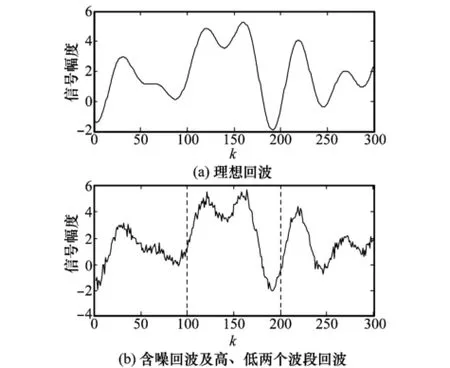
图2 目标理想回波与含噪回波(SNR=15 d B)
式中,fk=f0+k·Δf(k=0,1,…,N-1);c为电磁波的传播速度;e(k)为零均值高斯白噪声。
令
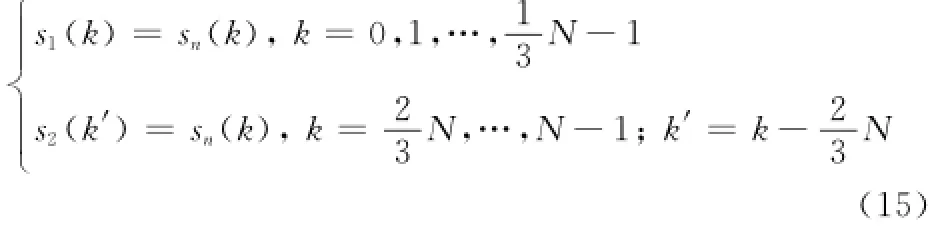
即用一部雷达的低波段s1(k)和高波段s2(k′)(图2(b)中第一条虚线前的部分为s1(k),第二条虚线后的部分为s2(k′))来模拟两部宽带雷达同时照射这个目标时得到的相参回波,而且这两部雷达的带宽均为1 GHz。为了使二者不相参,令线性相移η1=-π/9,固定相移η2=-π/6,将它们施加在低波段回波s1(k)上(如图5(a)所示),得到

图3和图4分别是相参与非相参的两段回波的一维像、累加一维像的对比,由此可以看出,非相参的两段信号的一维像是错位的,其累加一维像与相参信号的一维像相比有较多的尖峰,能量不集中,相应的熵比较大,这与本文第2.2节的分析是一致的。
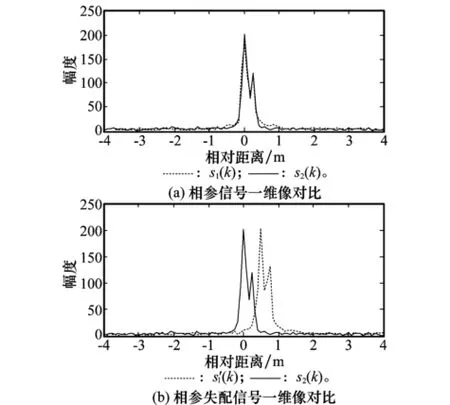
图3 相参与非相参的一维像对比
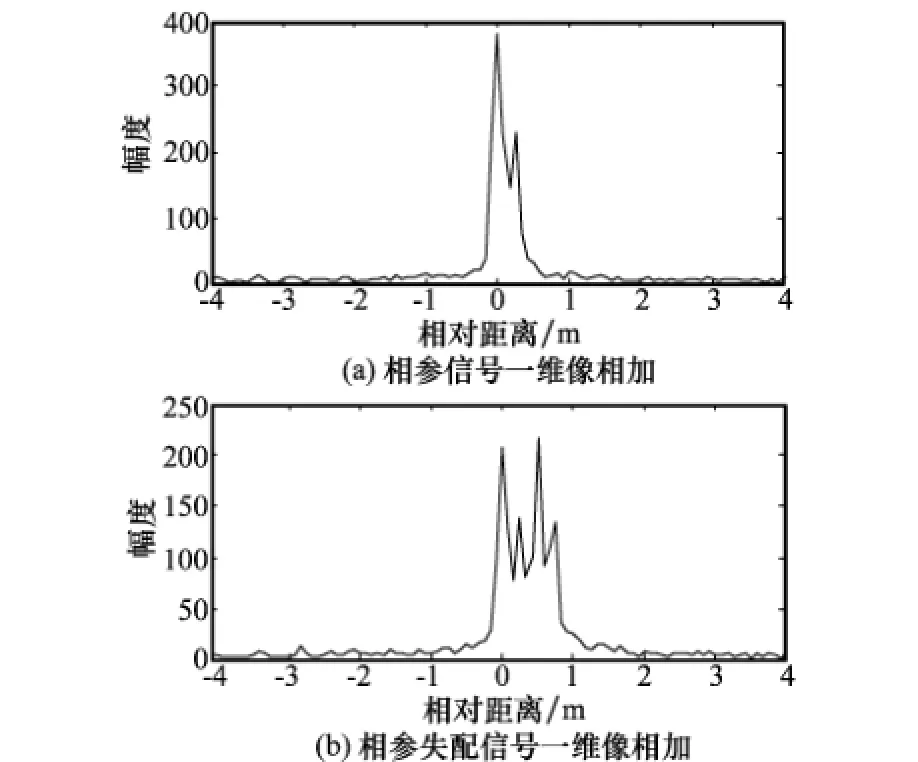
图4 相参与非相参的累加一维像对比
由于相参配准最终是为了得到更好的融合数据,从而提高雷达图像的分辨率。因此本实验将在两个信号相参配准后,建立一个全局的全极点模型

然后利用相参配准后的数据和文献[1]提出的超宽带参数估计与预测方法求出式(16)的各个参数,填补空缺频带上的数据,从而得到全频带上的信号
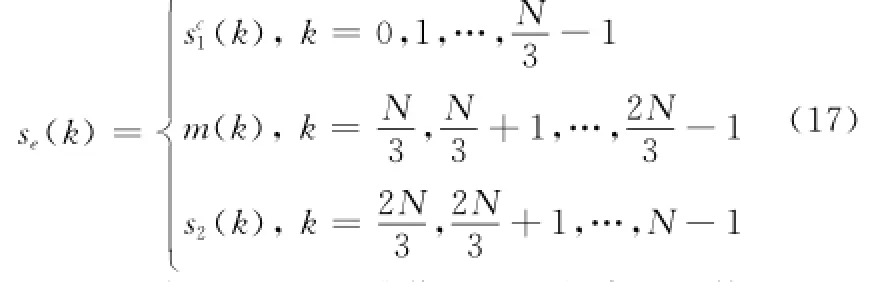
对比s(k)、sn(k)与se(k)的一维像即可对相参配准算法的性能进行评估。
实验中sn(k)的信噪比为15 dB(加入噪声前后的回波分别如图2(a)和图2(b)所示),用本文提出的方法得到线性相位和固定相位的估计η~1、η~2,利用式(10)和式(12)得到sc1(k)。而后根据式(16)和式(17)得到融会后的全频带的回波,并对其进行傅里叶变换,得到相应的一维像。实验结果如图5~图8所示。
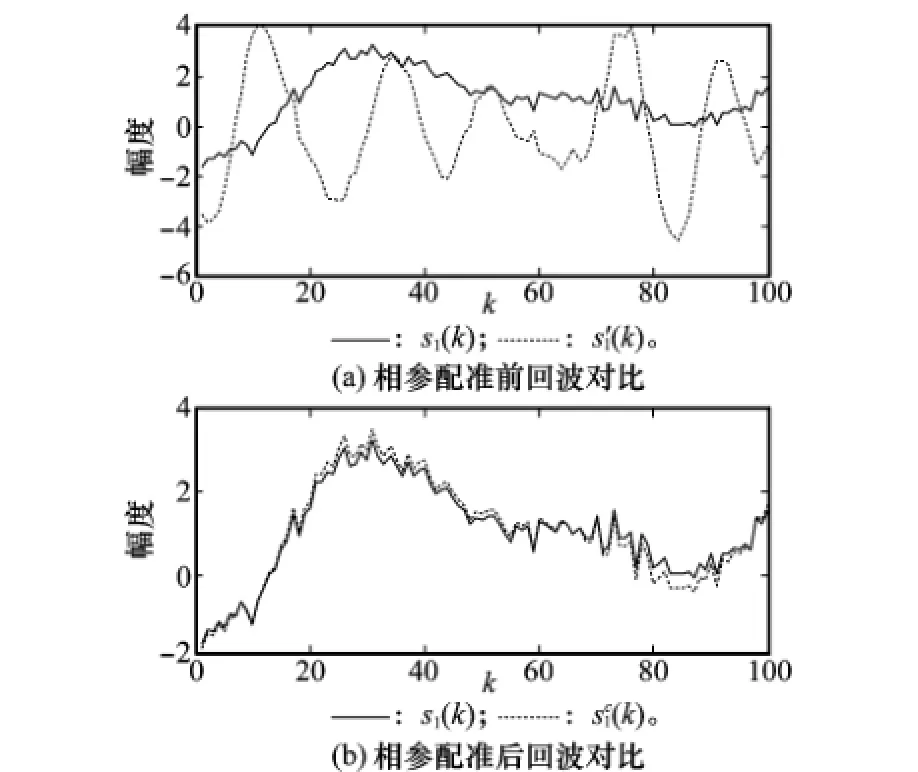
图5 非相参回波与相参配准子带回波
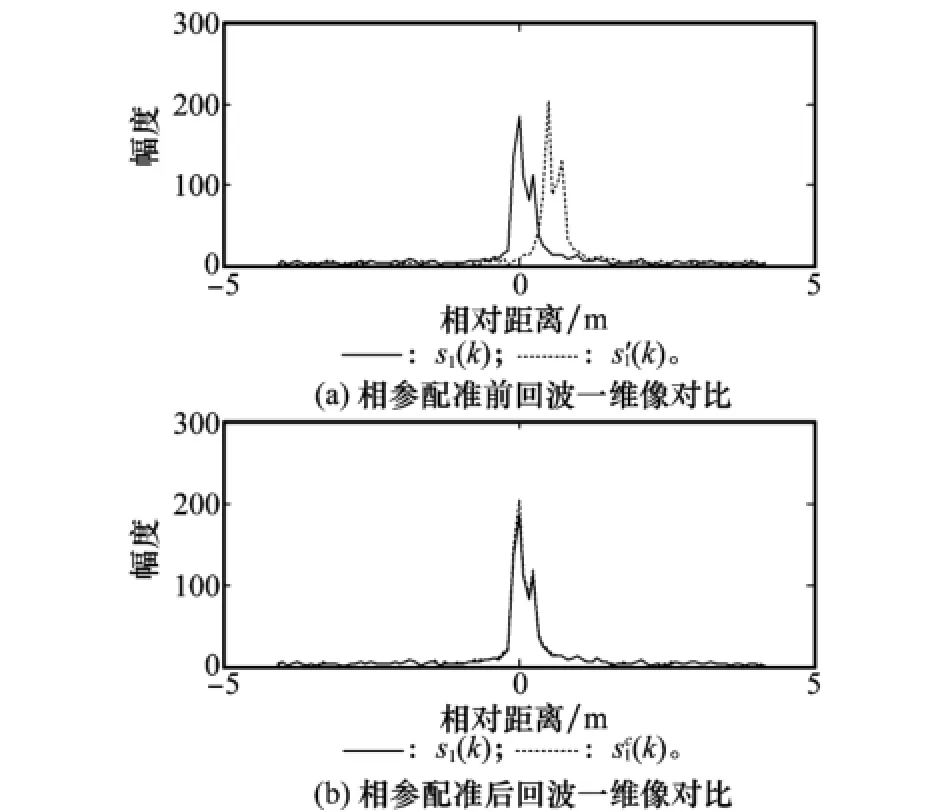
图6 相参配准前、后子带回波一维像
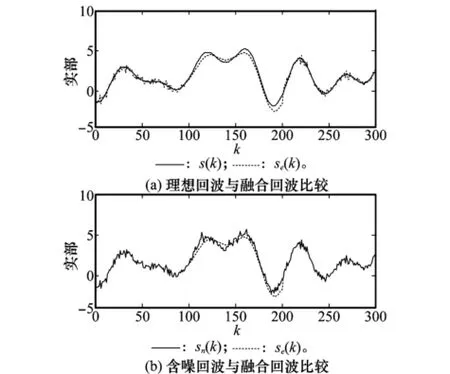
图7 全频带回波对比
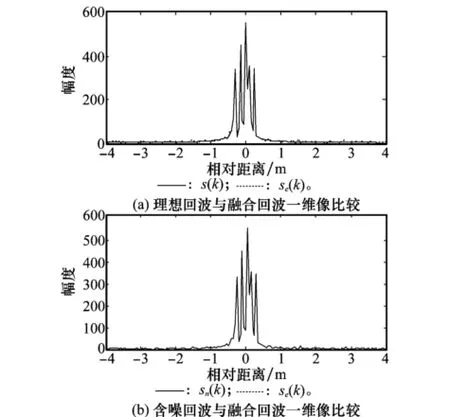
图8 全频带回波一维像对比
图5 (b)中,相参配准处理后得到的信号sc1(k)整体上与s1(k)吻合得较好,个别地方幅度和相位上差异较为明显,这主要是由于噪声的干扰加大了相参配准算法在估计线性相位和固定相位时的误差,而信号中变化较为剧烈的地方对误差更为敏感。从图6可以看出,其一维像比信号的吻合度要高,仅仅在尖峰的幅度上稍有差别,但是相对位置是一致的。因为s1(k)和sc1(k)的信号带宽仅有1 GHz,理论上它们只能分辨相距15 cm以上的散射点,所以图6中的一维像仅有两个尖峰。图7中的融合信号se(k)与s(k)、sn(k)都是非常接近的,三者的距离像也仅是在幅度上有少许误差,相对位置和形状几乎是一样的。特别地,融合时中间一段的数据被估计出来,再加上其前面的sc1(k)和后面的s2(k),这三段相参的数据合在一起就是一个3 GHz带宽的回波信号,其分辨能力为5 cm,因此实验中的5个散射点应该都能分辨出来,图8的结果证实了这一点。由此也可以看出,本文的相参配准算法是能够满足多波段数据融合要求的。
噪声对相参配准的精度有很大的影响,为了检验本文算法的抗噪性,在目标的理想基带回波中分别加入信噪比为-5 dB,-4 d B,…,20 d B的高斯白噪声,用本文的最小熵方法(简记为E方法)、文献[1]的方法(简记为C方法)和文献[7]的相关方法(简记为R方法)重复上面的实验过程,每个信噪比下进行100次蒙特卡罗仿真,最后得到线性相位和固定相位的估计误差,结果如图9所示。
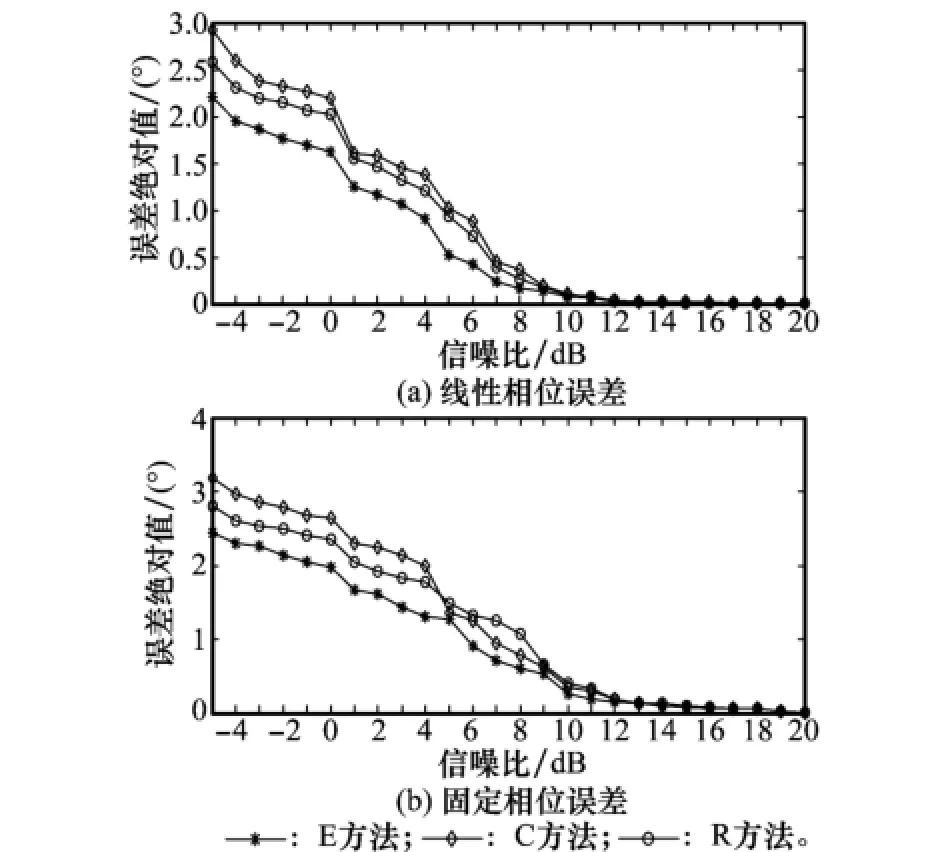
图9 3种算法估计性能比较
图9 (a)中当信噪比高于10 dB时3种算法的估计误差接近,虽然这一阶段随着信噪比的降低估计误差有所增大,但是还是较为平稳的。然而在信噪比朝着-5 d B降低的过程中,三者的估计误差都大幅增加。纵向来看,同信噪比的条件下E方法的估计误差最小,C方法的估计误差最大;横向来看,达到同一估计误差时,E方法所需要的信噪比最低,而另外两种方法需要的信噪比要高出E方法1~2 dB。由此可知E方法的适应性更强,这和本文第2.2节对E方法抗噪性的理论分析相符。C方法的极点个数估计受噪声影响较大,而这个值一旦估计不准确将对后续的算法非常不利,除此以外C方法中用到的root MUSIC抗噪性能也较弱。R方法没有利用信号的相参性来提升信号的信噪比,因而在相关函数的计算过程中也易受噪声影响。用η~1对非相参信号补偿后,再用非线性最小二乘方法或者搜索的方法估计出固定相位(其中E、C算法用的是前者,而R算法用的是后者),因此η~2的估计误差与η~1的估计误差、固定相位估计方法都有关系。图9(b)中,在信噪比较高的情况下3种算法的固定相位估计误差接近,在信噪比为-5~11 dB时,三者的估计误差都不同程度地变大。采用定步长搜索的R算法在信噪比为5~10 d B时其估计误差超过了C算法(这一范围内C算法的线性相位估计误差大于固定相位误差),说明定长搜索方法对噪声敏感。而采用最优化方法的E、C算法则相对平稳一些,但是由于C算法的线性相位估计误差较大,从而降低了其固定相位的估计精度。因此,本文提出的算法(E算法)在处理低信噪比信号的相参配准时相位估计精度最高,鲁棒性也是最强的。
4 结 论
多波段宽带雷达信号融合技术可以获得大带宽的目标回波数据,从而为提高雷达图像的分辨率、获取目标的高分辨图像提供了一条切实可行的途径。它有助于提高目标的正确识别率,同时为目标载荷的分析提供了基础。本文重点研究了其中的一个关键问题——多波段回波数据的相参配准,它是多波段数据融合首先要解决的问题,该问题处理的好坏很大程度上影响回波数据融合的成败。本文经过分析得出只有线性相位对一维像产生影响的结论,从而为线性相位和固定相位独立估计提供了理论依据。与现有的两类方法不同,在线性相位的估计中,本文算法充分利用了相参信号一维像的累加对信噪比的改善作用,并与最小熵结合在一起,从而使得本文算法在低信噪比条件下依然能够达到较为理想的估计精度。本文采用了非线性最小二乘拟合算法估计固定相位,这使得算法在较大的噪声环境中估计固定相位时较为稳定。相参配准和带宽融合实验证明了本文算法在处理相参失配问题时是有效的,不同信噪声比下的相参配准实验表明本文算法与另外两类算法相比有更高的精度和鲁棒性。
[1]Cuomo K M,Piou J E,Mayhan J T.Ultra-wideband coherent processing[J].IEEE Trans.on Antennas and Propagation,1999,47(6):1095- 1107.
[2]Yu Z,Chen Y,Sun Z,et al.The super-resolution range imaging based on multiband wideband signal fusion[C]∥Proc.of the 2nd Asian-Pacific Conference on Synthetic Aperture Radar,2009:160- 164.
[3]Van Dorp P,Ebeling R,Huizing A G.High resolution radar imaging using coherent multiband processing techniques[C]∥Proc.of the Radar Conference,2010:981- 986.
[4]Ba X,Zhou F,Wang Q,et al.Sparse subband imaging of space targets in high-speed motion[J].IEEE Trans.on Geoscience and Remote Sensing,2013,51(7):4144- 4154.
[5]He F,Xu X.High-resolution imaging based on coherent processing for distributed multi-band radar data[J].Progress in Electromagnetics Research,2013,141:383- 401.
[6]Yang Y,Blum R S.Phase synchronization for coherent MIMO radar:algorithms and their analysis[J].IEEE Trans.on Signal Processing,2011,59(11):5538- 5557.
[7]Fu Y W,Zhang C,Li X,et al.One-dimensional super resolution multi-band radar fusion imaging technology research[J].Progress in Natural Science,2006,16(10):1310- 1316.(付耀文,张琛,黎湘,等.多波段雷达融合一维超分辨成像技术研究[J].自然科学进展,2006,16(10):1310- 1316.)
[8]Xu X,Li J.Ultrawide-band radar imagery from multiple incoherent frequency subband measurements[J].Journal of Systems Enginee-ring and Electronics,2011,22(3):398- 404.
[9]Ye F,He F,Sun Z Y.Radar signal level fusion imaging[C]∥Proc.of the IEEE International Geoscience and Remote Sensing Symposium,2008:1288- 1291.
[10]Tian B,Chen Z,Xu S.Sparse subband fusion imaging based on parameter estimation of geometrical theory of diffraction model[J].IET Radar,Sonar&Navigation,2014,8(4):318- 326.
[11]Liu C L,He F,Wei X Z,et al.Research on multiple radar fusion imaging coherence compensation based on data correlation[J].Systems Engineering and Electronics,2010,32(6):1266- 1271.(刘承兰,贺峰,魏玺章,等.基于数据相关的多雷达融合成像相干配准研究[J].系统工程与电子技术,2010,32(6):1266- 1271.)
[12]Tian J H,Sun J P,Wang G H,et al.Multiband radar signal coherent fusion processing with IAA and apFFT[J].IEEE Trans.on Signal Processing Letters,2013,20(5):463- 466.
[13]Wang C.Research on radar signal level fusion imaging techniques[D].Changsha:National University of Defense Technology,2006.(王成.雷达信号层融合成像技术研究[D].长沙:国防科学技术大学,2006.)
[14]Shannon C E.A mathematical theory of communication[J].The Bell System Technical Journal,1948,27(3):379- 423.
[15]Liao H S,Hu G Q,Xiang J B,et al.A fast range alignment approach for ISAR imaging based on minimum entropy criterion[C]∥Proc.of the 1st Asian and Pacific Conference on Synthetic Aperture Radar,2007:189- 191.
[16]Hu M,Gao L,Zhang Z.A new ISAR range alignment methodvia minimum tsallis entropy[C]∥Proc.of the IEEE International Conference on Microwave Technology&Computational Electromagnetics,2013:391- 394.
[17]Zhang S H,Liu Y X,Li X.Minimum entropy based ISAR motion compensation with low SNR[C]∥Proc.of the IEEE China Summit&International Conference on Signal and Information Processing,2013:593- 596.
[18]Hu J M,Jiang W D,Fu Y W,et al.A novel range alignment algorithm for ISAR[C]∥Proc.of the 2nd International Conference on Computer Engineering and Technology,2010:358- 362.
High precision coherent compensation for multiband radar data at low SNR
ZOU Yong-qiang,GAO Xun-zhang,LI Xiang
(School of Electronics Science and Technology,National University of Defense Technology,Changsha 410073,China)
Coherent compensation among subbands is the first problem to be solved in multi-band radar data fusion,which is directly related to the success of the multi-band data fusion.At present,there are two popular methods,one is based on the data correlation,and the other is based on the Prony model.Both of them can achieve satisfactory results at high signal to noise ratio(SNR),but not applicable in high clusters.This paper analyzes the impact of fixed phase and linear phase which caused the coherent phase mismatch on high radar range profile(HRRP),then proposes a highly accurate phase parameter estimation method according to the entropy-minimization principle and nonlinear least-squares fit.Simulation results show that the method proposed can get a higher phase estimation accuracy in low SNR conditions.
radar data fusion;coherent compensation;entropy-minimization principle;nonlinear least-squares
TN 95
A
10.3969/j.issn.1001-506X.2015.01.09
邹永强(1986-),男,博士研究生,主要研究方向为雷达成像、数据融合、雷达自动目标识别。
E-mail:zouyongqiangnudt@yeah.net
高勋章(1972-),男,副教授,博士,主要研究方向为信息融合、自动目标识别、雷达信号处理。
E-mail:gaoxunzhang@126.com
黎 湘(1967-),男,教授,博士,主要研究方向为雷达系统与信号处理、非线性信号处理、雷达自动目标识别。
E-mail:xiangli@nudt.edu.cn
1001-506X(2015)01-0048-07
网址:www.sys-ele.com
2014- 01- 26;
2014- 05- 19;网络优先出版日期:2014- 08- 06。
网络优先出版地址:http://w ww.cnki.net/kcms/detail/11.2422.TN.20140806.1458.008.html
国家杰出青年科学基金(61025006)资助课题
