液浮陀螺仪过载振动复合环境试验
2015-06-15吴建国李海波冯国林
吴建国,李海波,张 琪,丁 洋,冯国林
(1. 北京强度环境研究所 可靠性与环境工程技术重点实验室,北京 100076;2. 北京强度环境研究所,北京 100076)
液浮陀螺仪过载振动复合环境试验
吴建国1,李海波1,张 琪2,丁 洋2,冯国林1
(1. 北京强度环境研究所 可靠性与环境工程技术重点实验室,北京 100076;2. 北京强度环境研究所,北京 100076)
为了验证航天飞行器惯性制导器件在过载振动复合环境下的环境效应和适应性能力,以液浮陀螺仪为研究对象,基于刚柔耦合的多体动力学理论,简要分析了过载振动复合环境对惯性器件的耦合影响机理。基于离心机-振动台综合离心试验平台,建立了惯性仪表过载振动复合环境试验方法,开发了惯性仪表过载振动复合环境试验专用采集系统,并开展了惯性仪表过载振动复合环境效应试验研究。试验结果表明,过载振动复合环境对惯性仪表输出值的影响具有耦合效应。因此,对惯性仪表类产品进行环境适应性考核时,应当使用与真实飞行环境更为一致的过载振动复合环境试验方法。
过载;振动;复合环境;环境效应;试验方法
过载、振动、温度以及气动压力等环境是航天飞行器在高速机动与再入飞行阶段所经历的典型环境因素。据不完全统计,由上述环境因素引起的产品失效比例高达 70%以上[1]。产品失效的原因可能是单一环境因素的作用,也可能是复合环境的综合作用。所以,如何设计地面环境试验复现产品故障成为环境试验技术的发展重点。研究表明,复合环境比单一环境试验更能有效地激发产品故障[2-3]。国军标150A和美军标810G[4]均强调复合环境比单一环境更能有效地模拟实际飞行环境效应,当实际使用过程出现多种环境因素共同作用时,鼓励进行复合环境试验。因此,过载振动、过载温度、过载外压等复合环境试验技术受到越来越多的重视[5-8]。本文将重点阐述过载振动复合环境试验技术的机理和实现方法。
从环境因素的作用机理看,过载振动复合环境对惯性制导设备的危害尤其显著。譬如:航天飞行器惯性导航系统的精度偏差问题,可能是空间环境的气流扰动、温度或压强等环境的变化引起的,也可能是过载振动复合环境共同作用的原因。针对该问题,众多专家学者对陀螺仪和加速度计(惯性导航系统的核心器件)开展了结构动力学仿真与环境效应分析,综合分析后认为,发射、机动、再入等飞行过程中的过载振动复合环境效应是影响惯性导航测量精度的主要因素[9-11],但缺乏有效的试验方法验证过载振动复合环境效应对惯性导航测量精度的影响机理。
本文在北京强度环境研究所集成研制的综合离心试验平台上探索了过载振动复合环境试验方法,并以液浮陀螺仪为研究对象,开展了惯性仪表过载振动复合环境效应试验研究,验证了过载振动复合环境对惯性仪表输出的耦合影响。
1 复合环境效应机理
过载振动复合环境是指航天飞行器在发射、机动或再入飞行阶段所经受的过载加速度与振动加速度同时作用的综合环境,是一种典型的静、动载荷共同作用的环境类型。通常在静、动载荷构成的复合环境中,大多数产品的故障是由于静、动载荷共同作用的结果,而非单一的静或动载荷。例如,过载振动复合环境对航天飞行器惯性导航系统的控制精度偏差有明显的影响。原因是液浮陀螺仪等惯性仪表过载振动复合环境的综合作用下工作时,其运动部件转子由于过载加速度的原因会产生弹性变形。这种弹性变形会改变结构在振动环境的动态特性,进而影响惯性仪表输出精度,具体影响机理分析如下。
1.1 多体动力学模型
惯性仪表安装在航天飞行器仪器舱内,航天飞行器飞行时的各种载荷(如发动机推力、振动、噪声等)通过主承力结构传递到仪器支架,再通过支架传递到惯性仪表上。此时惯性仪表的动力学分析是一个复合环境下的多体动力学问题。
图1所示为航天飞行器惯性仪表多体动力学模型:M1、M2、M3分别表示航天飞行器的主体结构、仪器支架和惯性仪表;T为推力,fv(t)为振动输入,均为系统的广义外力;mi、ki、ci分别为Mi对应的质量、刚度和阻尼;a为航天飞行器的加速度。假设参考基e0的原点位于发射点,且e0=(x0, y0, z0, 1),连体基ei与刚体Mi相连,则ei=(xi, yi, zi, 1) (i=1, 2, 3),其中,e1初始状态的原点与发射点重合。运动状态中的连体基 ei与参考基e0的关系如图2所示。
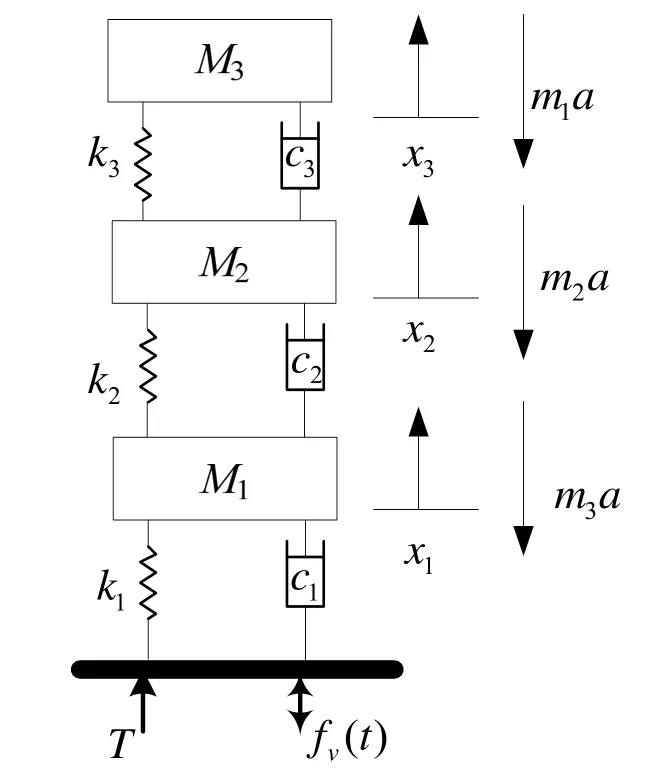
图1 航天飞行器惯性仪表的多体动力学模型Fig.1 Multi-body dynamics model of space inertial instrument
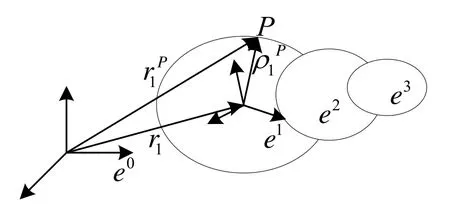
图2 运动状态连体基ei与参考基e0的关系Fig.2 Relationship between eiand e0
1.2 运动方程
若相邻连接刚体间的相对运动自由度(也即广义坐标)为qi(i=1, 2, 3),则M1、M2、M3构成的多体系统动力学运动方程为
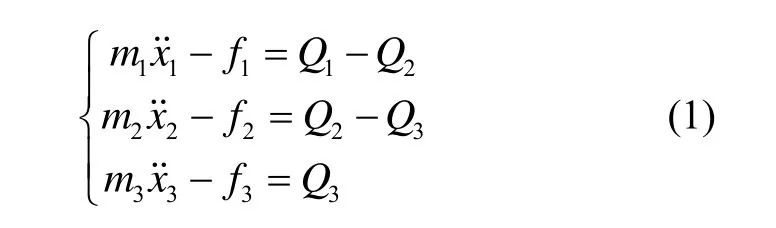
式中,xi表示刚体 Mi相对参考基的广义位移,且表示刚体Mi对应的广义外力,且表示多体运动系统中刚体Mi对应的广义系统内力,且qi0为qi的初始值。
1.3 复合环境效应
由文献[9]可知,在不考虑惯性仪表的弹性形变的影响时,M3的广义系统内力为

但实际上惯性仪表弹性形变造成的影响不容忽略。以陀螺仪为例,单自由度陀螺仪可简化为转子支撑系统如图3所示。
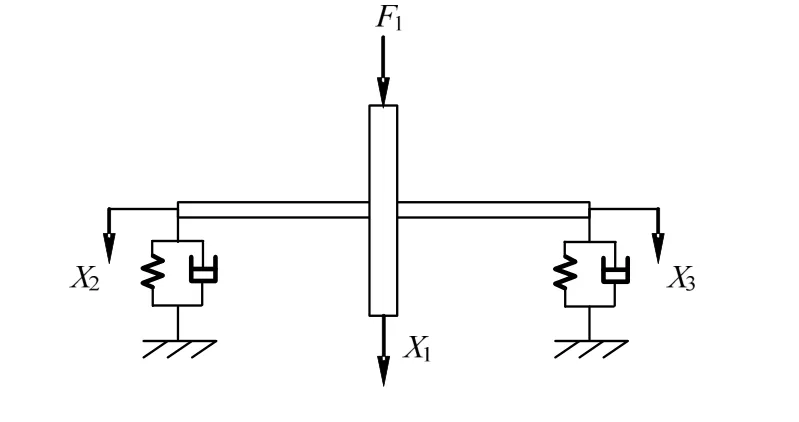
图3 转子支撑系统模型Fig.3 Model of rotor support system
在对转子支撑系统进行动力学分析时,根据刚柔耦合动力学理论可知,由于支撑系统的弹性变形,导致其动力学性质发生了改变,增加了负刚度和阻尼系数m vl,其中v是航天飞行器结构运动速度,l为转子支撑系统中支撑梁的长度[9]。因此,转子支撑系统还要受到附加耦合约束此时,M3的广义力应表示为

对比式(3)和式(2)可知,若不考虑转子梁在过载加速环境下弹性变形的影响,复合过载振动复合环境下陀螺仪等惯性仪表的输出将会存在很大的漂移偏差,从而影响航天飞行器的控制精度。
2 复合环境模拟方法
在航天飞行器研制试验体系的地面验证试验中,过载加速度环境的模拟方式主要有两种:离心机和火箭撬。火箭橇模拟的过载加速环境与真实飞行情况更为接近,但火箭橇滑行过程中会产生不可控的附加振动环境,且试验造价昂贵,持续时间短,环境参量可控性差,因此过载加速度环境的地面试验常用能持续提供稳定加速度的离心试验模拟。
本文依托北京强度环境研究所自主研发的综合离心试验系统(如图4所示),开展惯性仪表过载振动复合环境试验技术研究。该试验系统最大过载容量为400 g·t,为目前国内最大的综合离心试验系统,可开展过载振动、过载外压、过载热等多种复合环境试验。

图4 过载振动复合环境试验系统Fig.4 Test system of overload-vibration composite environment
开展过载振动复合环境试验时,将专用振动台与综合离心平台装配组成过载振动复合环境试验系统,过载加速度环境由离心机模拟,振动环境由安装在离心机臂上的振动台模拟,可开展最大过载加速度50 g,最大推力20 kN,频率范围20~2000 Hz的过载振动复合环境试验。
试验过程中可对过载与振动环境的模拟加载进行远程操控。利用综合离心试验平台的光栅测速装置与驱动电机组成的反馈闭合回路,调节离心机转速实现过载环境加载控制;通过工装安装面上的振动加速度传感器与振动控制仪组成闭合回路,形成自反馈控制循环。另外,惯性器件的输出电压由惯性仪表专用测试系统采集、记录,专用测试系统由工控机、电源、数字万用表、信号转接箱等组成,如图5所示。
图5 惯性仪表专用测试系统Fig.5 Data collection system of inertial instrument
3 复合环境试验实例
3.1 试验对象与目的
液浮陀螺仪是一种飞行器制导装备中常用的单自由度惯性陀螺仪,以液浮陀螺仪为试验对象开展过载振动复合环境试验,对比液浮陀螺仪在单一过载环境与过载振动复合环境下的输出变化,验证过载振动复合环境效应。
3.2 试验实施与过程
将液浮陀螺仪与专用工装紧固在一起,然后再通过转接工装与振动台动圈相连。专用测试系统固定于离心机臂的安装支架上,与液浮陀螺仪组成测试回路,通过远程控制专用测试系统,实时监控液浮陀螺仪的各项性能参数,采集液浮陀螺仪在不同加载环境条件下的输出电压,并记录在工控机的存储介质上。正式试验开始前,对试验加载系统、控制系统、专业测试系统进行调试。系统调试完毕后,采集液浮陀螺仪输出电压初值。
完成被试产品安装与系统调试后,开始正式试验。首先,在离心机静止状态,按图6(a)中的验收量级振动环境条件施加单一振动环境,并采集液浮陀螺仪输出电压。然后,启动离心机,按照图6(b)所示环境条件要求施加过载加速度,当过载加速度加载至2g且稳定后,远程控制专用测试系统采集液浮陀螺仪输出电压,采集时长 60 s;采集完毕后启动振动台,按照图6(a)所示液浮陀螺仪验收振动环境条件施加随机振动环境,振动加速度总均方根值为3.6 g,采集过载振动复合环境下的液浮陀螺仪输出电压,采集时长60 s。采集结束,暂停振动台工作,提高离心机转速,增加过载加速度量级。重复上述实施步骤,依次开展4 g、6 g、8 g、10 g单一过载与过载振动复合环境试验,并采集液浮陀螺仪在各种环境条件下的输出电压。
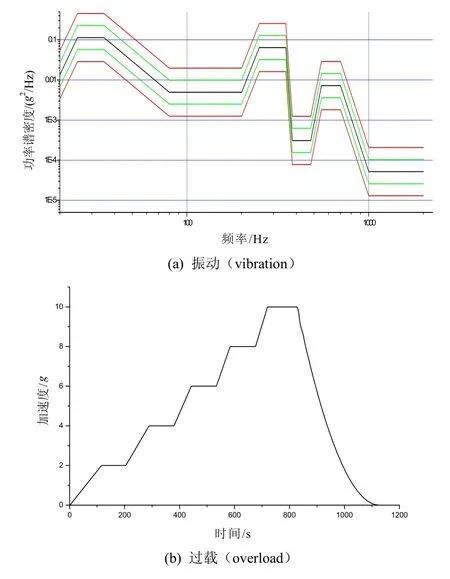
图6 环境试验条件Fig.6 Environment test conditions
3.3 试验结果与分析
液浮陀螺仪输出专用测试系统的采样频率为2 Hz,60 s内采集到的样本量为120个,剔除采样区间首尾各5 s内采集到的20个数据后,将剩余的100个液浮陀螺仪输出电压值作为有效样本进行统计分析。由于未引入陀螺仪的误差模型进行修正,所测输出电压值仅能反映在某一环境条件下的陀螺仪输出信号大小,所以该试验结果只能反映复合环境的效应,不能验证液浮陀螺仪的输出精度。不同量级环境条件下的液浮陀螺仪的输出电压如图7。
尽管本次试验中获得的液浮陀螺仪输出电压值只能反映某一环境条件下液浮陀螺仪输出信号的大小,不能体现液浮陀螺仪的测量精度与漂移误差,但是输出信号随不同环境条件的变化仍能反映出复合环境效应的复杂性。由图7可以看出:与液浮陀螺仪的静态输出电压相比,单纯施加总均方根值为3.6 g的随机振动环境,液浮陀螺仪的输出电压变化较小;而施加单一过载环境后,液浮陀螺仪的输出电压变化较大,且随着过载加速度由2 g增至10 g,液浮陀螺仪的输出电压呈非线性的不规则变化。由图7还可以看出,过载振动复合环境对液浮陀螺仪的输出影响最大,而且在0~10g的变化范围内,过载加速度的变化对过载振动复合环境效应的影响不大,但整体趋势是随过载加速度增大而效应增强。造成上述试验现象的原因初步认为是由于过载加速度与振动环境的综合作用,导致弹性支撑梁变形所致。
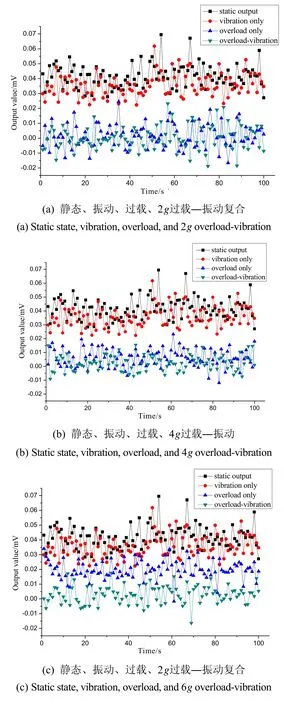
液浮陀螺仪过载振动复合环境试验验证了过载振动复合环境对惯性仪表的耦合作用机理,结果表明单一振动或过载加速度环境标定的输出漂移修正模型不能准确表达复合环境作用下输出漂移情况。为提高航天飞行器控制系统的控制精度,应当采用过载振动复合环境试验标定的液浮陀螺仪输出漂移修正模型。
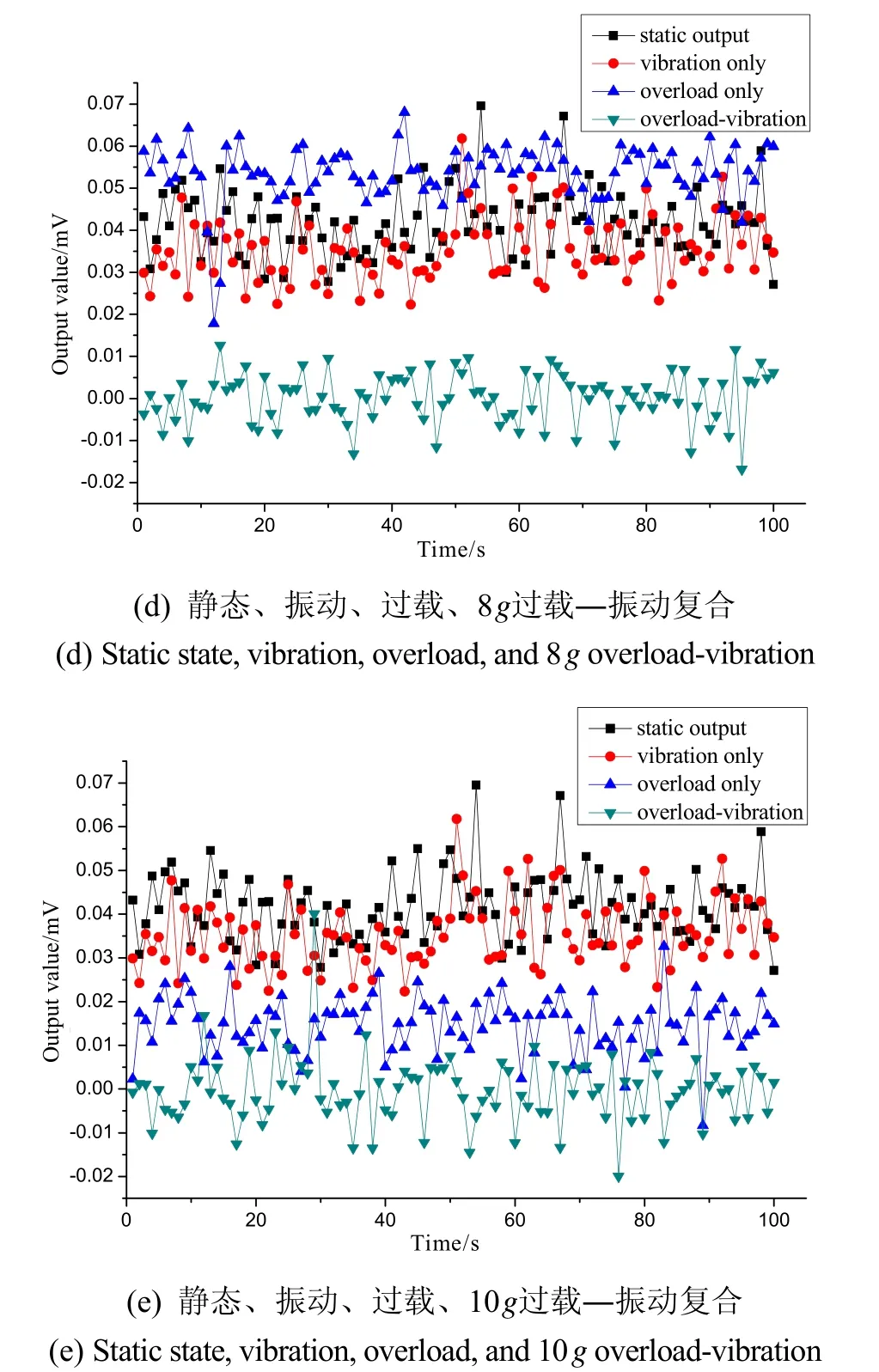
图7 液浮陀螺仪的输出电压Fig.7 Output voltage value of fluid floating gyro
4 结 论
针对航天飞行器高速机动与再入飞行阶段的过载振动复合环境模拟与验证技术,从复合环境效应机理与模拟方法等方面进行了探索与分析,并以液浮陀螺仪为对象,开展了过载振动复合环境效应试验研究。在0~10 g的过载加速度变化范围内,对比研究了单一过载加速度或振动环境、过载振动复合环境对液浮陀螺仪输出值的影响。试验结果表明,过载振动复合环境对惯性仪表输出值的影响具有耦合效应。因此,对惯性仪表类产品进行环境适应性考核时,应当使用与真实飞行环境更为接近的过载振动复合环境试验方法。
此外,本文仅研究了过载加速度的变化对过载振动复合环境效应的影响,有待进一步开展振动量级变化对过载振动复合环境效应的影响研究,以及惯性仪表类产品过载振动复合环境下精度标定试验技术等研究工作,完善过载振动复合环境试验方法与规范,满足国防装备发展对过载振动复合环境试验的需求。
(References):
[1] 方兵, 沈润杰, 何闻, 等. 航天器元件多参数综合可靠性环境试验研究综述[J]. 中国机械工程, 2009, 20(22): 2766-2772. Fang Bing, Shen Run-jie, He Wen, et al. Research summary of the multiparameter combined environmental test of spacecraft component reliability[J]. China Mechanical Engineering, 2009, 20(22): 2766-2772.
[2] O' Shea, Paul. Environmental test helps you juggle design demands [J]. Evaluation Engineering, 1997, 36(5): 38-40.
[3] Schutt J. Vibration testing of electronic assemblies[J]. Electronic Packaging and Production, 1996, 36(13): 20-26.
[4] USA department of defense. MIL-STD-810G environmental engineering consideration and laboratory test[S]. AMSC, 2008.
[5] 吴建国, 李海波, 张琪, 等. 综合离心环境试验技术研究进展[J]. 强度与环境, 2014, 41(1): 1-9. Wu Jian-guo, Li Hai-bo, Zhang Qi, et al. Advances in synthesis centrifugal environment test[J]. Structure & Environment Engineering, 2014, 41(1): 1-9.
[6] JS Kang, F Arute, D Yoel, et al. Combined environment testing on a nanosatellite[J]. Journal of Spacecraft & Rockets, 2015, 52: 1-8.
[7] Guan W, Meng X, Dong X. Calibration of accelerometer with multicomponent inputs[C]//Proceedings of IEEE International Instrumentation and Measurement Technology Conference. Montevideo, Uruguay: 2014: 16-19.
[8] Goethem D V, Jepsen R, Romero E. Vibrafuge: Re-entry and launch test simulation in a combined linear acceleration and vibration environment[C]//44th AIAA Aerospace Sciences Meeting and Exhibit. Reno, Nevada, 2006.
[9] 王跃钢, 项定祥, 韩心中. 复合环境下惯性仪器多体系统动力学分析[J]. 弹箭与制导学报, 2007, 27(3): 71-73. Wang Yue-gang, Xiang Ding-xiang, Han Xin-zhong. The dynamic analysis of inertial instruments multi-body in overloading and vibration compound environment[J]. Journal of Projectiles, Rockets, Missiles and Guidance, 2007, 27(3): 71-73.
[10] 吴瑾颖, 刘光斌. 力学复合环境下挠性陀螺仪的动力学分析[J]. 中国惯性技术学报, 2006, 14(5): 58-61. Wu Jin-ying, Liu Guang-bin. Dynamics analysis for dynamically tuned gyro under overload-vibration[J]. Journal of Chinese Inertial Technology, 2006, 14(5): 58-61.
[11] 彭云辉, 缪栋, 王跃钢, 等. 过载振动复合环境下液浮积分陀螺仪误差建模与仿真[J]. 电光与控制, 2007, 14(2): 138-141. Peng Yun-hui, Miao Dong, Wang Yue-gang, et al. Error modeling and simulation of liquid floated integral gyro under overloading-vibrating environment[J]. Electronics Optics & Control, 2007, 14(2): 138-141.
Environment effect and adaptability test on spaceflight fluid floating gyro under overload + vibration
WU Jian-guo1, LI Hai-bo1, ZHANG Qi2, DING Yang2, FENG Guo-lin1
(1. Science and Technology on Reliability and Environment Engineering Laboratory, Beijing Institute of Structure and Environment Engineering, Beijing 100076, China; 2. Beijing Institute of Structure and Environment Engineering, Beijing 100076, China)
A fluid floating gyro is studied to validate the environment effect and adaptability of spaceflight inertia components under overload-vibration composite environment. The coupling mechanism of the environment effect is analyzed based on the coupled multi-body dynamics theory, then the overload-vibration composite environment test for inertial instrument is designed and carried out by using specially designed data collection system. Test results indicate that the load-vibration effects on inertial instrument output voltage have nonlinear coupling effect. Therefore, in evaluating the environmental adaptability of inertial instrument products, such overload-vibration composite environment test method should be used as it is more consistent with real flight environment.
overload; vibration; composite environment; environment effect; test method
V416
:A
2015-09-11;
:2015-11-28
国防基础科研计划(A0320110018)
吴建国(1979—),男,博士,高级工程师,主要从事综合环境试验技术、结构疲劳试验与寿命预示、可靠性试验与评估技术研究。E-mail: wujianguo@buaa.edu.cn
1005-6734(2015)06-0840-05
10.13695/j.cnki.12-1222/o3.2015.06.025
