连续相位调制信号的载波相位软同步算法
2015-06-14周相超赵旦峰
周相超,薛 睿,赵旦峰,付 芳
(哈尔滨工程大学 信息与通信工程学院,哈尔滨150001)
0 引 言
连续相位调制(CPM)是一类先进的调制技术,具有相位连续、频谱特性优良的特点,与PSK调制相比,具有更高效的频带利用率和功率利用率,而且调制之后的信号包络恒定,对功率放大器的非线性特性不敏感,非常适合于信道传输。目前,CPM 的两种特例MSK 和GMSK 已广泛应用于卫星通信、深空通信和以GSM 为代表的数字蜂窝移动通信等领域,但因接收机复杂度较高、信号同步存在较大困难,通用的CPM 尚未获得广泛的应用[1]。
目前,CPM 信号的载波同步方法主要分为数据辅助同步和非数据辅助同步[2]。数据辅助同步方法的同步性能较好,但需占用额外的传输带宽和功率;非数据辅助同步方法不需额外的带宽和功率,但同步精度较差,且仅适用于信噪比较高的情况,很难实现有效同步。
近年来,随着具有接近香农限的高性能的Turbo 码和LDPC 码的广泛应用,逐渐兴起了一类新的“码辅助同步”算法。码辅助同步算法基于最大似然准则,将译码器与同步器进行联合迭代,从而获得接近理想的载波同步性能。文献[3]将Turbo 码译码结构与最大似然准则结合,基于期望最大算法与和积算法进行迭代载波同步,可以获得较精确的同步;文献[4]提出了基于译码软信息的改进的极性判决相位检测算法,在低信噪比条件下可获得较传统方法更理想的同步性能;文献[5]通过将锁相环与LDPC 译码器结合,使用迭代译码过程中的外信息来获得接近理想的相位估计;文献[6]提出一种基于译码软信息反馈的载波同步算法,不需导频序列即可获得载波相位的最佳估计值;文献[7]基于最大似然准则,提出简化的导频联合编码辅助载波同步算法,该算法能大幅提高同步参数的估计精度和范围,在一定的导频长度下可逼近理想同步;文献[8]中针对SCCPM 串行级联系统,提出一种Turbo 同步结构,通过CPM 信号的正交指数分解和卡尔曼滤波来估计载波相位;文献[9]针对LDPC-CPM 迭代系统,提出一种最大化后验概率均值的载波同步算法。
由Rimoldi 分解可知:CPM 信号可以分解为连续相位编码器CPE 和无记忆调制器MM 的组合[10],因此CPM 信号具有类似于卷积码的网格记忆结构。本文在Rimoldi 分解的基础上,借鉴Turbo 码和LDPC 码的“码辅助同步”思想,提出一种通用的CPM 信号载波相位同步算法。该算法基于最大似然准则,分别使用MAP 算法和EM算法对CPM 信号进行解调和相位估计,将解调器和同步器联合设计,利用解调器输出的软信息辅助载波相位的同步。
1 CPM 调制与系统模型
1.1 CPM 调制原理
CPM 信号具有相位连续、包络恒定的特点,其复指数形式的表达式为[11]:

式中:Es是符号能量;T 是符号周期;wc是载波频率;θ0是初始相位;α 是传输的符号信息,取值范围为{±1,±3,…,±(M-1)},M 为CPM 的进制数;ψ(t,α)是携带信息的相位超量,同时也决定信号的带宽,定义式为:
式中:h 为CPM 信号的调制指数;L 为CPM 的记忆长度;η(t,Ck,αk)和Φk分别为相位分支和相位状态,定义式分别为:
式中:向量Ck=(αk-L+1,…,αk-2,αk-1)是符号信息序列,称为相关状态。
CPM 信号的相位响应函数q(t)的表达式为:
具有以下特性:

g(t)称为CPM 的频率响应函数,主要有矩形波成型函数、余弦波成型函数和高斯脉冲成型函数,对应不同的CPM 类型。
1.2 CPM 软解调算法
传统的CPM 信号使用Viterbi 算法实现相干解调,不便于软信息的提取,为此,采用MAP 算法对CPM 信号进行软解调,以获取载波相位同步所需的软解调信息。
由Rimoldi 分解可知,CPM 信号隐含一个具有记忆性的网格编码器,类比卷积码的网格图,可定义k 时刻CPM 信号的状态为:σk=(Φk,Ck),对应的k+1 时刻的状态即为:σk+1=(Φk+1,Ck+1),相邻时刻两个相位状态之间的关系为:

CPM 信号的网格图如图1 所示,其中sS(e)和sE(e)分别表示起始状态和结束状态,u(e)和c(e)分别表示输入信息符号和输出码字符号,S={s1,…,sn}表示状态集合,U={u1,…,um}表示输入符号集合,ξ=S×U={e1,…,emn}表示任意两个网格状态之间的所有可能状态转移。
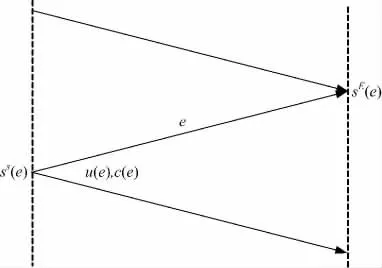
图1 CPM 网格状态图Fig.1 CPM trellis
根据MAP 算法的原理:若网格状态图已知,则输出码字概率、输入比特概率、状态转移概率等多种概率分布均是可计算的,根据码辅助同步思想,在推导CPM 信号的载波相位同步算法的过程中,可由MAP 算法计算所需的解调软信息类型。
1.3 系统模型
本文给出的算法和仿真都是基于图2 的系统模型的。系统采用Rimoldi 分解的方式产生CPM信号,解调为基于MAP 算法的软解调方式,传输信道为高斯白噪声信道(AWGN),其双边功率谱密度为N0/2。假定系统具有理想信号增益和符号定时同步,码间干扰可忽略。
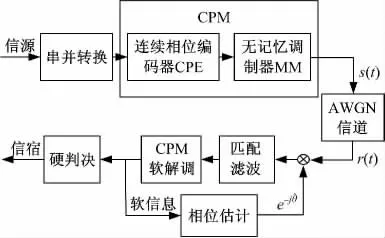
图2 CPM 系统模型Fig.2 CPM system model
CPM 信号s(t)经AWGN 信道传输,到达接收机的信号r(t)表达式为:

式中:n(t)是经过AWGN 信道引入的零均值复高斯白噪声,其同相分量与正交分量相互独立,方差为N0/2;θ 是未知且恒定或慢变的载波相位,需要对其进行估计和补偿。
2 载波相位软同步算法
2.1 载波相位的最大似然估计

在CPM 信号的最大似然检测中,匹配滤波器用于产生软解调的先验信息,输出度量定义为:
式中:h(l)(t)为匹配滤波器单位冲击响应,表达式为:


表示网格图中一条可能的传输路径。在CPM 信号的网格图中,从一个节点sS(e)出发,共有M 个分支,每一条分支对应当前的输入符号αk,定义分支度量为:

因此,载波相位θ 的似然函数可表示为:

由最大似然准则,为估计载波相位,需要对式(14)求导,令导数为零,得到载波相位的最大似然估计值,但方程没有闭环解,数学求解困难,因此需要使用其他方法来近似,传统方法有数据辅助和非数据辅助的近似方法[13],本文使用EM 算法,采用迭代方式逐步接近载波相位的最大似然估计。
2.2 EM 算法
EM 算法是一种广泛应用于参数估计领域的迭代求解算法,适用于存在隐含变量的优化问题,算法的目标是找出包含隐性变量的概率模型的最大可能的解[14]。EM 算法包括E 步骤和M 步骤,经过E 步骤和M 步骤的多次迭代,可获得未知参数的近似最大似然估计值。
在E 步骤中构造Q 函数:
M 步骤用于获取新的估计值:

2.3 基于解调软信息的载波相位估计
接收信号的表达式如式(8)所示,载波相位θ为待估计参数,由EM 算法,构造Q 函数:

由式(17)可将后验概率p z|( θ) 作如下化简:

将式(17)和式(19)带入式(18)可得:
式中:最后一个等号右边第二项与相位θ 无关,可直接忽略,因此,载波相位θ 的Q 函数可简化为:

因传输信道为AWGN 信道,似然函数p(r|α,θ)可表示为:
因此Q 函数中的对数似然函数为:
综合式(23)的对数似然函数和式(24)的后验概率表达式,CPM 信号载波相位θ 的Q 函数最终可表示为:
因此,基于EM 算法对CPM 信号的载波相位进行估计时需要2 种信息,Zk(Ck,αk)和p(Δk|,Zk(Ck,αk)来自匹配滤波器的输出度量,状态转移概率可由CPM 信号自身的MAP 软解调算法获得。
由EM 算法原理,在获得Q 函数之后,通过M步骤中的取最大值操作,即可获取载波相位θ 的迭代估计值,由式(25)可得:
至此,推导出了基于EM 算法和CPM 软解调的载波相位软同步算法,该算法利用解调器输出的状态转移信息来辅助载波相位估计,以迭代的方式获得接近最大似然的载波相位同步,既避免了最大似然估计求解困难的问题,又可获得较高的估计质量。
3 系统仿真与性能分析
基于图2 所示的系统模型对本文提出的CPM 信号的载波相位软同步算法进行性能仿真,仿真参数设置如下。采用的CPM 信号类型为:进制数M=8,记忆长度L=2,调制指数h=1/2,成型函数使用升余弦型;帧长为N=512,进行10 000 帧仿真;载波相位同步器与软解调器之间的最大迭代次数设为10 次;载波相位偏移量的范围设定为-180°≤θ ≤+180°;归一化信噪比的范围设为0≤Eb/N0≤10 dB。为验证本文所提软同步算法的有效性,分别对CPM 信号的载波相位估计精度和误码率性能进行数值仿真。
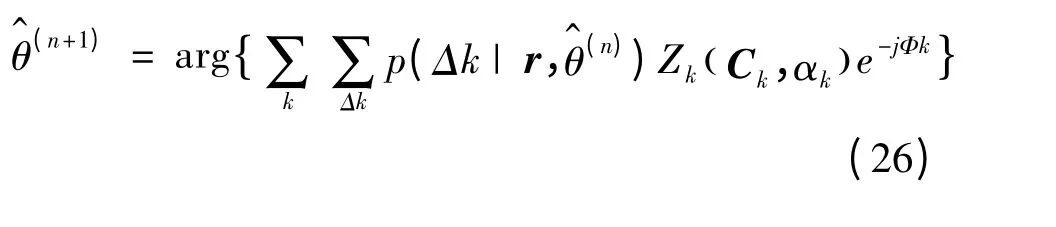
图3 给出了载波相位估计的均方误差曲线,作为对比,同时给出修正克拉美罗限(MCRB)、传统的数据辅助估计(DA)的均方误差曲线,其中,载波相位的修正克拉美罗限为[15]:

由图3 可以看出,当Eb/N0≥5 dB 时,载波相位软同步算法的均方误差估计性能逐渐接近MCRB,与传统的DA 方法性能相近。
图4 给出了在多种相偏、不同信噪比条件下CPM 信号的误码率性能,由图4 可见,当Eb/N0≥5 dB 时,载波同步逐渐趋于收敛,系统性能损失低于0.1 dB,相位偏差对系统性能的影响得到抵消,系统的误码率接近理想同步系统的性能。
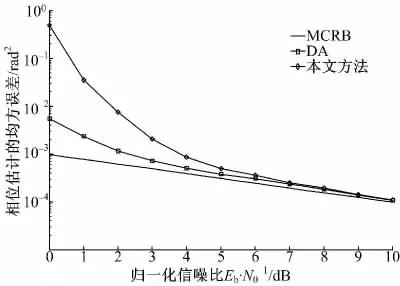
图3 载波相位估计的均方误差曲线Fig.3 RMSEE curves of phase estimation
图4 不同相位偏移时CPM 信号的误码率性能曲线Fig.4 BER curves of CPM for different phases
图5 给出了CPM 信号在归一化信噪比为6 dB 和8 dB 条件下相位估计的范围。可以看到:相位未补偿时,误码率受相位偏移影响较大,使用本文算法对载波相位偏移补偿之后,误码率性能得到改善;该算法能有效估计的相位偏移范围是|θ|<90°,在该范围内,估计误差足够小,误码率性能接近理想同步情况。
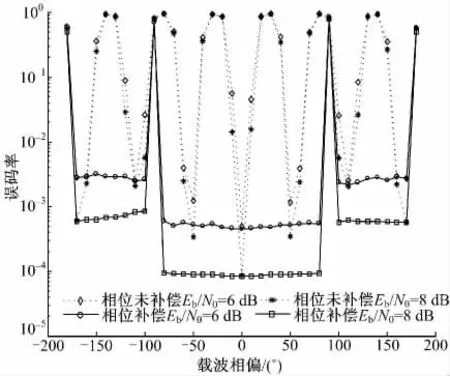
图5 CPM 信号的相位补偿曲线Fig.5 Phase compensation curves for CPM
4 结束语
因同步困难,CPM 信号的应用受到较大局限,本文借鉴最新的码辅助同步思想,基于最大似然准则,将CPM 信号的解调器与同步器联合,利用解调器输出的软信息去辅助载波相位的估计,从而达到载波相位同步的目的。当Eb/N0≥5 dB时,相位估计误差接近MCRB,系统的误码率性能损失低于0.1 dB,可估计的相位偏移范围为| θ|<90°,经相位补偿,系统的误码率接近理想同步条件下的性能。本文算法适用于载波相位恒定或慢变的系统,以少量的系统复杂度为代价,达到近似理想载波相位同步的目的,具有良好的工程实用价值。
[1]Mengali U,Andrea A.Synchronization Techniques for Digital Receivers[M].New York:Plenum,1997.
[2]Bianchi P,Loubaton P,Sirven F.Non data-aided estimation of the modulation index of continuous phase modulations[J].IEEE Trans on Signal Processing,2004,52(10):2847-2861.
[3]Herzet C,Noels N,Lottici V,et al.Code-aided turbo synchronization[J].Proceedings of the IEEE,2007,95(6):1255-1271.
[4]张忠培,高中杰,徐俊辉.高阶调制码辅助同步算法研究[J].电子科技大学学报,2011,40(6):825-828.Zhang Zhong-pei,Gao Zhong-jie,Xu Jun-hui.Code-aided synchronization algorithm for high-order QAM[J].Journal of University of Electronic Science and Technology of China,2011,40(6):825-828.
[5]刘荣科,李满庆,侯毅.基于提前停止判决的编码软信息辅助载波同步[J].航空学报,2012,33(4):715-721.Liu Rong-ke,Li Man-qing,Hou Yi.Code-aided carrier synchronization via soft decision feedback based on early stopping criterion[J].Acta Aeronautica et Astronautica Sinica,2012,33(4):715-721.
[6]Valles E L,Wesel R D,Villasenor J D,et al.Pilotless carrier phase-synchronization via LDPC code feedback[C]∥IEEE Military Communications Conference,San Jose,2010:2068-2073.
[7]史治平,唐发建,晏辉,等.极低信噪比下的导频联合编码辅助载波同步算法[J].电子与信息学报,2011,33(10):2506-2510.Shi Zhi-ping,Tang Fa-jian,Yan Hui,et al.Joint assisted carrier synchronization algorithm by pilot and code at extremely low SNR[J].Journal of Electronics and Information Technology,2011,33(10):2506-2510.
[8]Qing Zhao,Stuber G L.Turbo synchronization for serially concatenated CPM[C]∥IEEE International Conference Communication,2006:2976-2980.
[9]Zhao D F,Zhu T L,Zhang Y Q.Code-aided synchronization algorithm based on posterior probability[C]∥The 3rd International Conference on Communication Software and Networks,Xi'an,IEEE,2011:607-611.
[10]Rimoldi B E.A decomposition approach to CPM[J].IEEE Transactions on Information Theory,1988,34(2):260-270.
[11]Noels N,Moeneclaey M,Simoens F,et al.A lowcomplexity iterative phase noise tracker for bit-interleaved coded CPM signals in AWGN[J].IEEE Transactions on Signal Processing,2011,59(9):4271-4285.
[12]Sklar B.数字通信-基础与应用[M].徐平平,宋铁成,叶芝慧,等译,北京:电子工业出版社,2008:429-432.
[13]Meyr H,Moeneclaey M,Fetchel S.Digital Communication Receivers:Synchronization,Channel Estimation and Signal Processing[M].New York:Wiley,1998.
[14]Dempster A P,Laird N M,Rubin D B.Maximum likelihood from incomplete data via the EM algorithm[J].Roy Stat Soc,1977,39(1):1-38.
[15]Aldo N,Andrea D,Mengali U,et al.The modified Cramer-Rao bound and its application to synchronization problems[J].IEEE Transactions on Communications,1994,42(2):1391-1399.
