镰刀型韭菜收割机的设计
2015-06-12马建国程佳卫姚运萍
□ 马建国 □ 程佳卫 □ 姚运萍
兰州理工大学 机电工程学院 兰州 730050
随着现代化机械进程的推进,农作物收获机械化成为农业生产过程中的重要环节和必然要求。由于农作物和蔬菜等季节性强、时间紧、任务重,且易遭受雨、雪、风、霜的侵袭等特点,机械化的普及成为迫切必要。其次实现农作物和蔬菜的机械化收获,对提高劳动生产率、减轻劳动强度、降低收获损失、确保农民收益均有极其重要的意义。
我国的农业机械,从3 500年前发明的镰刀,到如今的大型联合收割机,经历了漫长的发展,尤其是在新中国成立之后,先后经历了20世纪50~60年代的入门阶段,60~80年代的发展阶段,80~90年代的利用、引进先进技术阶段,尤其是90年代中后期,发展得更加迅速,各种农业机械不断完善,农业产量大幅度提高。从此,我国收获机械的发展进入了崭新的阶段。
1 设计要求与内容
韭菜收割机的难点在于要求收割机的刀片能紧贴地面,割完的韭菜茬离地高度不能过高,因为留茬过高不但会使菜农的收益受到严重的影响,同样会使韭菜在后面清理杂物、施肥时容易遭到踩踏,影响下茬的生长。但割茬也不能太低,否则,损伤到韭菜根部,同样会影响韭菜的下茬生长。
现有的类似锯齿形或者圆盘形收割机,主要用来收割小麦、水稻、苜蓿等高度较高的单杆茎植物,不能满足韭菜这种高度较低的簇生族植物的收割,也不能满足韭菜收割时的割茬低、不凌乱等需求。为了弥补此不足,笔者创新设计了一款链式剪切型刀具,利用韭菜收割机器的运动,带动传动柱运动,而传动柱又能带动链轮和同步带轮的转动,继而带动镰刀的剪切运动,完成韭菜的切割动作。而同步带又能实现韭菜的传送动作。
本设备可以边走边工作。实现韭菜的拔禾、扶正、剪割、传输等,方便捆绑及其后续动作的完成。另外,本设备只需手动推动,纯机械设计,节能、环保。
2 结构设计
在设计过程中,对镰刀、动力等机构进行了功能性设计,对同步带、链条等部件进行了选型改造,使收割机模型更加合理。
2.1 整体设计
收割机器的动力机构采用人力推动、轮子带动镰刀的后驱驱动方式。当使用者根据自己的身高调整好机器高度后,推动机器行走,机器的四个轮子开始转动,而作为驱动的两个后轮转动时,带动后轮轴上的斜齿轮转动,其与传动柱上的斜齿轮形成交错轴斜齿轮传动,改变运动方向,将轮子垂直地面的滚动变换成平行地面的水平运动。这种水平运动带动支撑链轮和传动轮的传动柱运动,从而使链轮旋转,带动安装在链条上的刀片运行,在收割机前面两个传动柱上的链轮相切处,两条镰刀互相啮合,进行剪切作物,当作物被剪断后,在啮合镰刀、高低两条同步传输带作用下,被输送到收集区,进行收集,机器完成动作,如图1所示。
2.2 动力结构设计
设计的目的是应用于小型农户垄植韭菜的收割,所以摒除了质量较大、使用费用较高的柴油机或电动机驱动装置,这就从根本上降低了韭菜收割成本,提高了设备的推广性价比。
本设备采用人力推动时,轮子滚动带动机器的运行是纯机械驱动方式。使用者可根据自己的使用高度调整好机器。当使用者推动机器行走时,机器的4个轮子开始转动,驱动后轮轴运动,带动后轮轴上的斜齿轮转动,其与传动柱上的斜齿轮形成交错轴斜齿轮传动,改变运动方向,带动镰刀运动,完成后续动作,如图2、图3所示。
2.3 镰刀结构设计
镰刀结构是本次设计的韭菜收割机中一个比较重要的部分,它将轮轴传来的动力经过传动柱上的链轮传递给链,并由链带动镰刀的运动,如图4所示。
张大爷老两口最近特别闹心,因为儿子小军年满35岁了,年初给他下了最后通牒,今年必须结婚,并且在亲戚朋友里广而告之。眼下就快年底了,儿子却一点动静都没有。最近,二老亲自上阵,四处张罗给儿子介绍对象,可儿子并不领情,安排10次相亲,顶多去两三次,连回家的次数都变少了。老两口吃不好、睡不香,俨然已经患上“儿女未婚恐惧症”。
由链的轮廓选定齿数为20。节距p为9.525 mm,传动比为1∶1,有中心距公式:
a=p[(L - z1+z2)+ (L - z1+z2)2-8 ( z2- z1)2] (1)
4p2p22π
式中:中心距a为450 mm。
笔者选择了06c-1 35型链,其链节数Lp为:

式中:z1、z2分别为两链轮的齿数;圆整后的链节数Lp为116节。
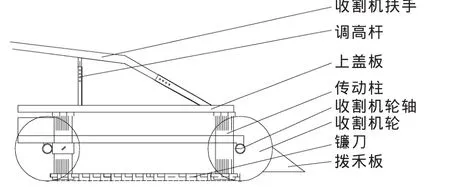
▲图1 结构简图
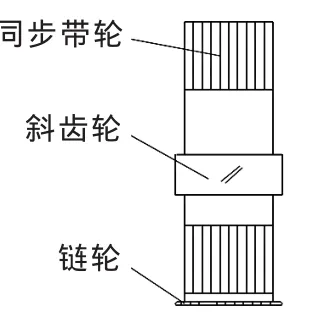
▲图2 传动柱简图

▲图3 后轮柱简图
镰刀和链节具有相同的数目,首先将金属薄型材料落料成长方形刀片,再机磨刀片非刃边,接着压背,而后依次加工过程是:淬火、回火、手工磨刃、抛光和清洗。为使刀片强度更高且不易产生变形,在每个刀片的非刃边上焊接与刀片等长且垂直于刀片的薄型板,此薄型板的强度不易发生弯曲变形即可,然后在此薄型板上反向焊接一块同链的外链板,将其夹固在外链板和内链板之间,将此镰刀的所有易产生较大应力的垂直处用加强筋加固,如此,镰刀便已制作完成。
当安装好刀片的收割机沿着作物垄行走时,散乱的簇生作物将在拨禾片的作用下,沿着拨禾片的内壁被扶正,进入剪切区。随着机器的前行,作物被同步带缓缓夹住,被同步带夹住后的作物就不会出现倒伏、倾斜等阻碍作物剪切的问题。当在动力作用下链轮带动链条运动时,安装在链条外链板和内链板之间的刀片运行,在收割机前部的两个传动柱上的镰刀啮合处形成剪切,逐步完成韭菜的切割动作。
2.4 输送带的设计
输送带的设计也是本产品的一大亮点,该韭菜收割机,采用了同步齿型带传动,如图 2的传动柱所示。同步带具有传动功率大、运行平稳、工作噪声小、无需润滑等多种优点,由于该设备中的带传动传递功率较大,但传递速率较小,前后传动柱的距离为450 mm左右,为了减少带与带齿的磨损,所以同步带的选择型号为30xl。齿数为30,节径为48.51 mm,外径为48 mm,挡边直径为51 mm,挡边内经3 mm,挡边厚度为1 mm的同步带。
如图1所示,该产品的设计充分应用了传动柱的结构,在传动柱的两头各设计了一段同步带轮,当机器在人力推动下,动力传递到传动柱,传动柱进行转动,带动左右、上下4条同步带同时转动。当韭菜被剪断时,韭菜被左右上下4条、两对同步带同时夹紧,传送过去,直到机器尾部离开啮合区。当所种韭菜较稀疏时,或者韭菜长势较弱小夹不紧时,镰刀发挥其另一个作用——托住韭菜防止下漏。因为本设计镰刀的优点还在于其前部两个传动柱进入啮合区后,镰刀将持续保持啮合状态,直到机器在尾部传动柱,啮合打开。

▲图4 镰刀结构简图
所设计的输送带不仅能保证所种韭菜较稠密时的传输问题,还能完美地解决长势较弱韭菜的传输。
2.5 传输带的固定
在整个机器的上方有一块上盖板,其上四角处各有一个螺纹孔,分别用来固定支撑传动柱T型固定杆,4根T型杆与上盖板用螺纹连接。收割机尾部的2个T型固定杆上各套有1根传动柱,与上盖板螺纹连接,T型杆的下端,有水平托台用来托住链条,防止在传动镰刀运作的过程中出现脱链等问题。此外,机器前端和尾部之间的T型杆中间布置有一个连杆,连杆的中间位置设置了一个张紧轮,用于张紧链条,防止链条脱链,或者链条老化后出现脱链的问题等。
3 实验效果
此收割机经实地实验数据表明,镰刀工作时,所剪切的韭菜茬高度随韭菜地的高度不同而不同,韭菜垄有凹坑时,割茬最大高度为10 mm。当韭菜垄有凸嘴时,韭菜割茬最小高度将在0~5 mm内(以韭菜根与叶的分界处为基准0),正常割茬高度为5 mm。但是,韭菜地过于不平坦(100 mm的取样长度内的地表最大高度Ry的平均值为50 mm以上)时,韭菜割茬高度将会在0~15 mm内变化,此时应该时刻注意设备的检查与调整,保证镰刀的链盒密封,防止泥土进入镰刀,影响切割效果。
正常人的行走速度为5~7 km/h即1.39~1.94 m/s,当一个行走速度为6 km/h的使用者推动此韭菜收割机时,其切割速度约为4 km/h,而一般大棚里行距为180 mm的韭菜,单垄产量平均为0.5 kg/m。如果使用者以4 km/h的速度不停息地进行作业1 h,那么本收割机的切割量为2 000 kg。而每亩大棚行距为180 mm的韭菜每茬的产量约为1 000~2 000 kg。也就是说,使用此韭菜收割机,一亩的韭菜将在不到一个小时的时间内割完。
4 结束语
韭菜收割机作为一款需求量较大的小型农业机械设备。其设计性能的优劣直接影响到机器是否实用。笔者开发的小型收割机的刀片能紧贴地面,割完的韭菜茬离地高度较低。其次,装备完全使用人力推动驱动的纯机械设计,大大降低设计及其使用和维修费用,成本较低,批量生产将更加便宜,还可以较大程度地提高农户的收益,具有较高的推广价值。
[1] 吴聚红,李向前.浅析我国韭菜生产的现状及发展趋势[J].农业科技通讯,2006(9):10-11.
[2] 咸俊龙,黎永红.大棚韭菜栽培技术 [J].现代农业科技,2013(15):105-108.
[3] 吴建能,茅孝仁,史久浩,等.慈溪地区韭菜高效种植模式与栽培技术[J].上海农业科技,2011(5):87-98.
[4] 韩金玉,卢博友,郭爱荣,等.我国农业自动化现状与发展趋势[J].农机化研究, 2003(3):8-10.
[5] 王俊超.韭菜收种实现全程机械化 [J].农业知识,2014(32):37.
[6] 张凤群.简易塑料棚韭菜高产栽培技术 [J].山东农业科学,2009(2):108.
[7] 尹健,杨宁,王妍,等.基于结构模块化的微型山地稻麦联合收割机设计[J].农机化研究,2011(11):106-109.
[8] 龚永坚,陈德俊,陈霓,等.国外半喂入联合收割机技术的应用探讨[J].农机化研究,2005(4):4-7.
[9] 杨立东,赵晓丹,付威.我国水稻联合收割机的类型与分析[J].农机市场,2005(5):23-25.
[10]王凯湛,马瑞峻,胡健锋.虚拟样机技术在农业机械设计上的应用和发展[J].中国农机化,2008(4):62-66.
